Előadást letölteni
Az előadás letöltése folymat van. Kérjük, várjon

1
2. Koordináta-rendszerek és transzformációk
2.1. Koordináta-rendszereink Az egyenes és sík egyenlete Az E. tér projektív lezárása Affin transzformációk Projektív transzformációk 1

2
Mire jó nekünk az analitikus geometria?
Geometriai modell: pontok, vonalak, felületek – testek Átalakítások: geometriai számítások transzformációk Rajzolás: geometrikus képek; vetületek - transzformációk API 2

3
2.1. Koordináta-rendszereink
A Descartes-féle derékszögű koordináták Polár-koordináták Gömbkoordináták, henger-koordináták Baricentrikus koordináták Homogén koordináták

5
Valószerű ábrázolás A valóság részletei – a képen is
A fényképezőgép egyidejűleg végtelen sok pontot Számítógép sorban, egyenként kiválasztott pontokat A képen a párhuzamosok látszólag egy pontba A valóságban nincs ennek megfelelő pont

6
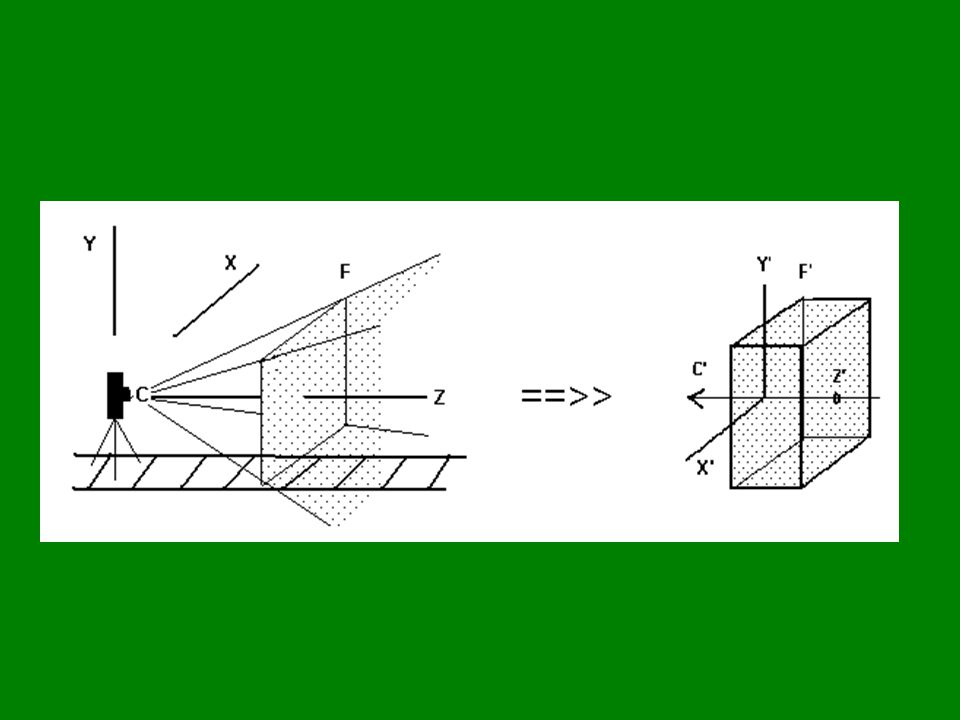
Például: egy sínpár perspektívája
X = [ 1, 0, 0, 0 ]; X’ = X X és Y tengely Y = [ 0, 1, 0, 0 ]; Y’ = Y Z = [ 0, 0, 1, 0 ] ; Z’ = [ 0, 0, 1, 1 ] Z tengely C = [ 0, 1, 0, 1 ]; C’ = [ 0, 0, 1, 0 ] a kamera F = [ 1, 2, 1, 1 ]; F’ = [ -1, 1, 0, 1] képkeret sarka

8
Az E 2 egy „inhomogenitása”
Az a egyenes pontjait K-ból vetítjük az x egyenesre. F’ =?; E 2 - ben nincs! ; néha kellene Legyen !! Az E 2 kibővítése: - minden egyenesen van még egy pont, - neve: „az egyenes ideális pontja”, (fernpunkt, távolpont) - párhuzamosok ideális pontja megegyezik: az egyenesek állása, - egy sík ideális pontjai a sík ideális egyenesén vannak.
 - párhuzamosok ideális pontja megegyezik: az egyenesek állása, - egy sík ideális pontjai a sík ideális egyenesén vannak.")
9
Az euklideszi tér „projektív lezárása”
Az euklideszi tér (ponthalmaz) kibővítése ideális pontokkal (halmazával) E3 U I3 H3 ; „homogén terünk” Az euklideszi tér „projektív lezárása” ( H3 és „homogén terünk” : KG )
 kibővítése ideális pontokkal (halmazával) E3 U I3 H3 ; „homogén terünk Az euklideszi tér „projektív lezárása ( H3 és „homogén terünk : KG )")
10
Homogén koordináták Az E 2 egy „inhomogenitása”
Az euklideszi tér kibővítése Homogén koordináták Homogén Descartes koordináták Descartes Homogén koordináták „Homogén terünk” szerkezete A sík homogén koordinátás egyenlete Miért használunk homogén koordinátákat?

11
A kibővített euklideszi sík
Az E 2 projektív lezárása (a „kibővített sík”); (projektív sík egy kitüntetett egyenessel.) „a homogén sík”: H 2 = E 2 I [„homogén sík” és „ H 2” jelölés csak KG] A projektív síkban: bármely két pont meghatároz egy egyenest bármely két egyenes meghatároz egy pontot …
; (projektív sík egy kitüntetett egyenessel.) „a homogén sík : H 2 = E 2 I 2 [„homogén sík és „ H 2 jelölés csak KG] A projektív síkban: bármely két pont meghatároz egy egyenest bármely két egyenes meghatároz egy pontot …")
12
A kibővített euklideszi tér
Az E 3 projektív lezárása (a „kibővített tér”); „a homogén tér”: H 3 = E 3 I („homogén tér”, „ H 3 ” csak KG) H 3 : P 3 (projektív tér) egy kitüntetett ideális síkkal A projektív térben: bármely 2 síknak van közös egyenese
; „a homogén tér : H 3 = E 3 I 3. („homogén tér , „ H 3 csak KG) H 3 : P 3 (projektív tér) egy kitüntetett ideális síkkal. A projektív térben: bármely 2 síknak van közös egyenese")
13
A kibővített euklideszi tér
Egyenes: „közönséges pontjai” + 1 ideális pont egy egyenes ideális pontja: az egyenes „állása”: , úgy, hogy: párhuzamosok ideális pontja (állása) megegyezik; egy sík ideális pontjai egy egyenesen vannak; ez „a sík ideális egyenese”, (a sík „állása”) párhuzamos síkok ideális egyenese (állása) megegyezik, a tér ideális elemei (pontok, egyenesek, síkok) egy síkban vannak; „a tér ideális síkja”
 megegyezik; egy sík ideális pontjai egy egyenesen vannak; ez „a sík ideális egyenese , (a sík „állása ) párhuzamos síkok ideális egyenese (állása) megegyezik, a tér ideális elemei (pontok, egyenesek, síkok) egy síkban vannak; „a tér ideális síkja")
14
Homogén koordináták (1)
A tér (közönséges részének) egy derékszögű KR-ében O : közönséges pont; belőle X, Y, Z tengelyek, és E pont P = (x, y, z) „homogén koordináták” : P = (x, y, z) [x, y, z, 1] h [x, y, z, 1] = [ h x, h y, h z, h ]; h0 Arányos számnégyesek ekvivalencia-osztálya (!) Figyelem: [ x, y, z, w ] h [ -x, -y, -z, -w ] !!
 egy derékszögű KR-ében O : közönséges pont; belőle X, Y, Z tengelyek, és E pont. P = (x, y, z) „homogén koordináták : P = (x, y, z) [x, y, z, 1] h [x, y, z, 1] = [ h x, h y, h z, h ]; h0. Arányos számnégyesek ekvivalencia-osztálya (!) Figyelem: [ x, y, z, w ] h [ -x, -y, -z, -w ] !!")
15
Homogén koordináták (2)
A v = (x, y, z) vektorral egyező állású egyenesek ideális pontja: Iv = [ x, y, z, 0 ]; az ideális pont „homogén alakja”, illetve: Iv = [ x, y, z, 0 ] h [ x, y, z, 0 ] = [ hx, hy, hz, 0 ]; h0
 vektorral egyező állású egyenesek ideális pontja: Iv = [ x, y, z, 0 ]; az ideális pont „homogén alakja , illetve: Iv = [ x, y, z, 0 ] h [ x, y, z, 0 ] = [ hx, hy, hz, 0 ]; h0.")
16
Áttérés a homogén alakra és vissza
Egy feladat leírása (adatai): DKR-ben: Számítások DKR-ben indulnak, de ha kell („kényes” műveletek előtt): áttérés homogén alakra: (x, y, z) [x, y, z, 1] a „kényes” műveletek homogén alakban; utána az eredmények „szűrése” (ideális pontok kizárása) visszatérés DKR-be (projektív osztás): [x1, x2, x3, x4] (x1 / x4, x2 / x4, x3 / x4). Az eredmények értékelése DKR-ben.
: DKR-ben: Számítások DKR-ben indulnak, de ha kell („kényes műveletek előtt): áttérés homogén alakra: (x, y, z) [x, y, z, 1] a „kényes műveletek homogén alakban; utána. az eredmények „szűrése (ideális pontok kizárása) visszatérés DKR-be (projektív osztás): [x1, x2, x3, x4] (x1 / x4, x2 / x4, x3 / x4). Az eredmények értékelése DKR-ben.")
17
A projektív osztás; vissza a DKR-be
H3 [x1, x2, x3, x4] pontjának : ha x4 0, akkor közönséges pont, és : [x1, x2, x3, x4] [x1/x4, x2/x4, x3/x4, 1] (x1 /x4, x2 /x4, x3 /x4), ha x4=0, de x1,x2, x3 nem mind nulla: akkor ideális pont, és ~ az (x1, x2, x3) irányvektor: | | egyenesek állása !!! [0,0,0,0] nem pont (számítások eredménye nem lehet).
, ha x4=0, de x1,x2, x3 nem mind nulla: akkor ideális pont, és ~ az (x1, x2, x3) irányvektor: | | egyenesek állása. !!! [0,0,0,0] nem pont (számítások eredménye nem lehet).")
18
„Ideális pontok” E 3 = { (x, y, z) } { [x, y, z, 1] }; x, y, z R I 3 = { [x, y, z, 0] }; x, y, z R H 3 = E 3 U I 3 ; a „kibővített tér”, a „homogén tér” Az euklideszi tér kibővítése: minden egyenesnek van még egy pontja: amely egyenes állását jellemzi párhuzamosok ideális pontja megegyezik egy sík ideális pontjai: a sík ideális egyenesén a tér ideális pontjai: az ideális síkban
![„Ideális pontok E 3 = { (x, y, z) } { [x, y, z, 1] }; x, y, z R. I 3 = { [x, y, z, 0] }; x, y, z R.](http://slideplayer.hu/slide/2185821/8/images/18/%E2%80%9EIde%C3%A1lis+pontok+E+3+%3D+%7B+%28x%2C+y%2C+z%29+%7D+%EF%82%BB+%7B+%5Bx%2C+y%2C+z%2C+1%5D+%7D%3B+x%2C+y%2C+z+%EF%83%8E+R.+I+3+%3D+%7B+%5Bx%2C+y%2C+z%2C+0%5D+%7D%3B+x%2C+y%2C+z+%EF%83%8E+R..jpg "H 3 = E 3 U I 3 ; a „kibővített tér , a „homogén tér Az euklideszi tér kibővítése: minden egyenesnek van még egy pontja: amely egyenes állását jellemzi párhuzamosok ideális pontja megegyezik egy sík ideális pontjai: a sík ideális egyenesén a tér ideális pontjai: az ideális síkban.")
19
Egyenesek közös pontja

20
„Homogén terünk” szerkezete (olv)
A valós számhármasok tere: R3 = { (x,y,z); x,y,z R } Az arányos számnégyesek ekvivalencia-osztályai: Ax,y,z,w = { h ·[ x, y, z, w ]; x,y,z,w,h R , h ≠ 0, }; A homogén tér: H 3 = Ax,y,z,w \ A 0,0,0,0 // A 0,0,0,0 = { [0,0,0,0] } 20
; x,y,z R } Az arányos számnégyesek ekvivalencia-osztályai: Ax,y,z,w = { h ·[ x, y, z, w ]; x,y,z,w,h R , h ≠ 0, }; A homogén tér: H 3 = Ax,y,z,w \ A 0,0,0,0 // A 0,0,0,0 = { [0,0,0,0] } 20.")
21
Miért használunk homogén koordinátákat?
A párhuzamosok „kivételes helyzete” megszűnik. A mátrix szorzás egységes formalizmusa (eltolás!) transzformációk egymásutánja: mátrixuk szorzata A középpontos vetítés számolható a pontok homogén koordinátáival és x4-es mátrixokkal
 transzformációk egymásutánja: mátrixuk szorzata. A középpontos vetítés számolható a pontok homogén koordinátáival és 4x4-es mátrixokkal.")
22
Az egyenes és a sík homogén-koordinátás egyenlete

23
Megjegyzés: homogén = egynemű
Az egyenes homogén egyenlete: ax + by + c = 0 Pontok homogén koordinátái: [x, y, z, w]

24
Az egyenes homogén, implicit egyenlete (E 2)
Az egyenes X = (x, y) [ x,y,1] pontjára (E 2): a · x + b · y + c = 0; a2 + b2 0; a · x + b · y + c · 1 = 0; Az egyenlet „implicit” (nem explicit) és „homogén”: (a,b,c) (a,b,c) · h; h 0
 [ x,y,1] pontjára (E 2): a · x + b · y + c = 0; a2 + b2 0; a · x + b · y + c · 1 = 0; Az egyenlet „implicit (nem explicit) és „homogén : (a,b,c) (a,b,c) · h; h 0.")
25
Az egyenes homogén koordinátás, homogén implicit egyenlete (H 2)
Egy P pont homogén(-koordinátás) alakja a síkban (h≠0): P = [ x, y, w ] T x,y,w nem mind 0 Egy e egyenes homogén(-koordinátás) alakja: e = [e1, e2, e3] h·[e1, e2, e3]; (h ≠ 0), ei nem mind 0 Az e egyenes egyenlete: az e minden X H2 pontjára: e · X = 0, azaz: e1·x + e2·y + e3·w = 0
 alakja a síkban (h≠0): P = [ x, y, w ] T x,y,w nem mind 0. Egy e egyenes homogén(-koordinátás) alakja: e = [e1, e2, e3] h·[e1, e2, e3]; (h ≠ 0), ei nem mind 0. Az e egyenes egyenlete: az e minden X H2 pontjára: e · X = 0, azaz: e1·x + e2·y + e3·w = 0.")
26
A sík paraméteres egyenlete (E 3) H 3
Adott: P = (px, py, pz ), Q = (qx, qy, qz ), R = (rx, ry, rz ) X = Q + s · (P - Q) + t· (R - Q) ; s, v R = (1-s-t) · Q + s · P + t · R a PQR sík minden pontjához található így s,t R, és minden s,t R -hez tartozik egy X a PQR síkban
, Q = (qx, qy, qz ), R = (rx, ry, rz ) X = Q + s · (P - Q) + t· (R - Q) ; s, v R = (1-s-t) · Q + s · P + t · R - a PQR sík minden pontjához található így s,t R, és - minden s,t R -hez tartozik egy X a PQR síkban.")
27
A sík implicit, homogén egyenlete (E 3)
A sík X = (x, y,z) [x, y,z,1] pontjára: a · x + b · y + c · z + d = 0; a2 + b2 + c2 0; a · x + b · y + c · z + d · 1 = 0; „homogén”: (a,b,c,d) (a,b,c,d) · h; h 0
 [x, y,z,1] pontjára: a · x + b · y + c · z + d = 0; a2 + b2 + c2 0; a · x + b · y + c · z + d · 1 = 0; „homogén : (a,b,c,d) (a,b,c,d) · h; h 0.")
28
A sík homogén koordinátás homogén, implicit egyenlete
Egy P pont homogén(-koordinátás) alakja (h≠0): P = [ x, y, z, w ] T x,y,z,w nem mind 0 Egy s sík homogén(-koordinátás) alakja (h ≠ 0): s = [s1, s2, s3, s4] h·[s1, s2, s3, s4]; si nem mind 0 Az s sík egyenlete: az s minden X H3 pontjára: s · X = 0, azaz: s1·x + s2·y + s3·z + s4·w = 0
 alakja (h≠0): P = [ x, y, z, w ] T x,y,z,w nem mind 0. Egy s sík homogén(-koordinátás) alakja (h ≠ 0): s = [s1, s2, s3, s4] h·[s1, s2, s3, s4]; si nem mind 0. Az s sík egyenlete: az s minden X H3 pontjára: s · X = 0, azaz: s1·x + s2·y + s3·z + s4·w = 0.")
29
Lássunk a koordináták mögé – t.i.
z = 0; mi ez? Egyenlőség, egyenlet, kié-mié? 0 x + 0 y + 1 z + 0 = 0 sík: z = 0 és akármilyen x, y; az XY sík x + y = 0 mi az? HF !

30
Nevezetes pontok és síkok homogén alakja -olv
Bármilyen c 0 számmal [0, 0, 0, c] T az origó, [c, 0, 0, 0] T az X tengely ideális pontja, [0, c, 0, 0] T az Y tengely ideális pontja, [0, 0, c, 0] T a Z tengely ideális pontja, [0, 0, 0, c] az ideális sík, (rajta van: [x,y,z,0]) [c, 0, 0, 0] az YZ (x = 0) koordináta-sík; pontjai: [0, y, z, h] [0, c, 0, 0] az XZ (y = 0) sík, [0, 0, c, 0] az XY (z = 0) sík homogén alakja.
 [c, 0, 0, 0] az YZ (x = 0) koordináta-sík; pontjai: [0, y, z, h] [0, c, 0, 0] az XZ (y = 0) sík, [0, 0, c, 0] az XY (z = 0) sík homogén alakja.")
Hasonló előadás











 geometriai gyorstalpaló>")








