The Inebriator (A mixer robot)
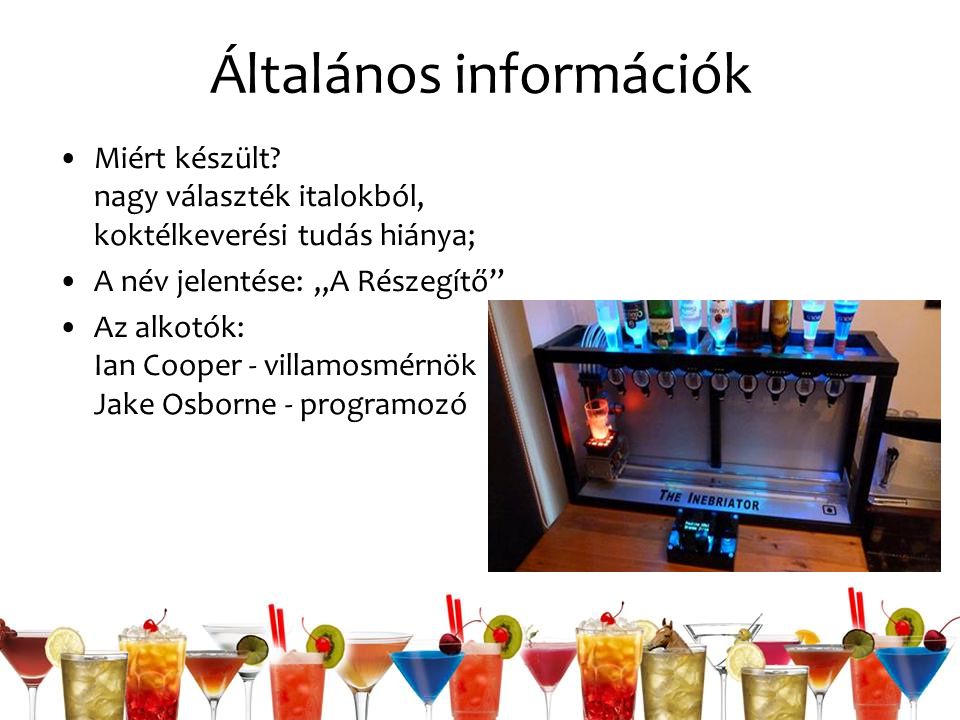
Általános információk Miért készült? nagy választék italokból, koktélkeverési tudás hiánya; A név jelentése: „A Részegítő” Az alkotók: Ian Cooper - villamosmérnök Jake Osborne - programozó
Működés közben
A vezérlés 2 vezérlő: Arduino Mega 2560 Fez Panda II Soros kapcsolat a kettő közt
Fez Panda II Az irányítóban van Ez a fővezérlő A menü rendszer és a koktéllista fut rajta Az italok listája XML formátumban micro SD kártyán Szintén a micro SD-re menti a naplófájlt Soros kapcsolat a kártyaolvasóval
Az irányító 20*2 karakteres VFD kijelző Forgó kódkapcsoló Fez Panda II Azért nem Arduino, mert a programozó könnyebben tudja megoldani.NET keretrendszerben
A pohártartó Nyomásérzékelő szenzor: figyeli hogy van-e pohár Dupla RGB led szalag a pohár megvilágítására
A pohártartó mozgatása Léptető motor a jó gyorsítás és lassítás miatt Nem löttyen ki az ital
A csapok és nyitásuk A tömények italcsapolóban Az italcsapolót DC motor hajtotta aktuátor nyitja A mixerek hűtött tartályban túlnyomáson 12V szolenoid szelepek a mixerek csövén
Az Arduino Léptető motor, DC motor, ledek, szelepek vezérlése Mixerenként külön vezérelt szelep (különböző viszkozitás miatt) Minden bekapcsolásnál 0 helyzetbe állítás RFID szenzor az admin jogokhoz
Köszönöm a figyelmet!