Előadást letölteni
Az előadás letöltése folymat van. Kérjük, várjon

2
ASIMO Fejlesztésének története Felépítése, specifikációi
Működése,képességei Alkalmazási területek Jövő

3
Fejlesztésének története

4
A Hondánál már az 1980-as években elkezdtek dolgozni egy emberek életét segítő, azt könnyebbé tevő roboton. E széria az első 1986 és 1993 között Korai, kísérleti jelleg P széria 1993 és 2000 között

5
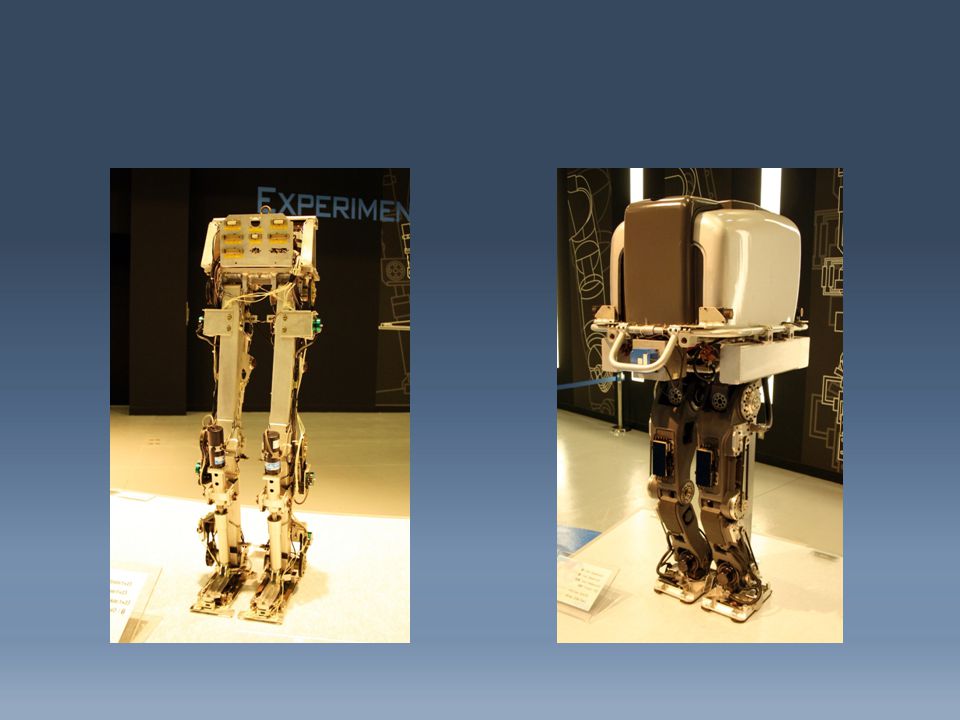
E széria E0 1986 Súlya: 16,5 kg Magassága: 101,3 cm 6 DOF
Felépítése egyszerű: nincs felsőtest, csak két láb. 1 lépést körülbelül 5 másodperc alatt tesz meg E6 1993 Súlya: 150 kg Magassága: 174,3 cm 12 DOF Önmagát egyensúlyozta Már képes volt lépcsőzni Egyenetlen felületen haladni

7
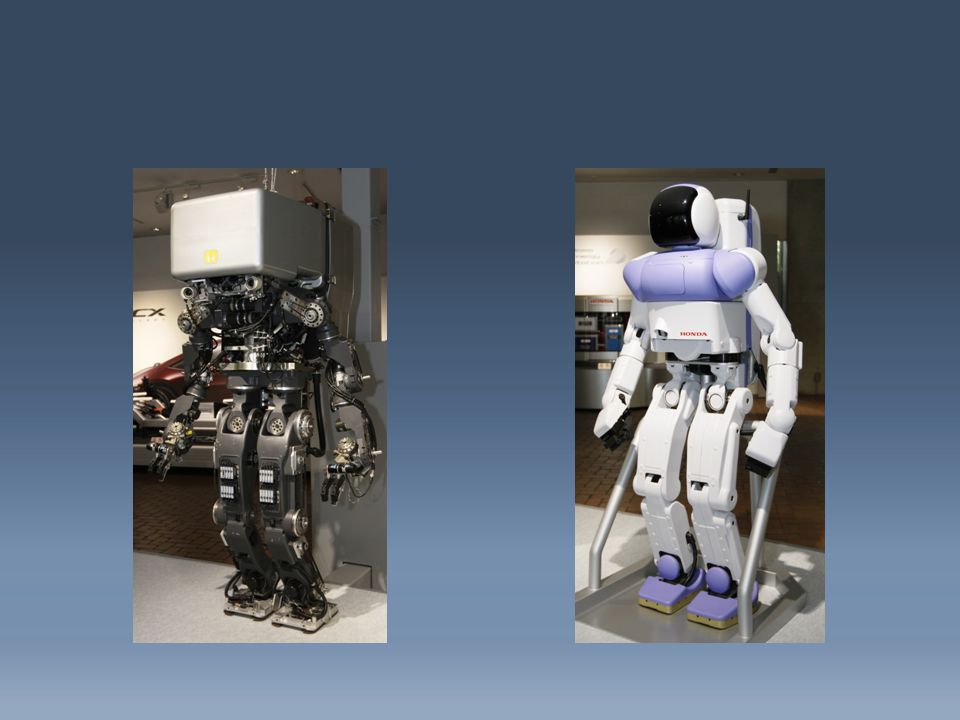
P széria P1 1993 ( titokban tartották, elsőnek 1996-ban a P2-t mutatták be ) Súlya: 175 kg Magassága: 191,5 cm 30 DOF P4 2000 Súlya: 80 kg Magassága: 160 cm 34 DOF

9
ASIMO Advanced step in innovative mobility Humanoid robot
Első modell 2000-ben, a legújabb változat 2014-ben. Súlya: 50 kg Magassága: 130 cm 2,7 km/h gyaloglási sebesség ( 1,6 km/h 1 kg cipelése esetén ) 9 km/h futás esetén 57 DOF Fej:3, kéz:2*7, kéz:13*2, törzs:2, láb:2*6
 9 km/h futás esetén. 57 DOF. Fej:3, kéz:2*7, kéz:13*2, törzs:2, láb:2*6.")
10
Felépítése Magnézium ötvözet műanyag borításban, könnyű és strapabíró
Lítium-ion akkumulátor 51,8 V , 6 kg Körülbelül 1 órát bír ( 3 óra feltöltési idő ) 34 szervómotor A robotot irányító számítógép a törzsnél található, ez irányítható PC-vel, vezeték nélküli kontrollerrel, vagy akár hangutasítással
 34 szervómotor. A robotot irányító számítógép a törzsnél található, ez irányítható PC-vel, vezeték nélküli kontrollerrel, vagy akár hangutasítással.")
11
Működése és képességei
Az emberhez hasonló kéz és kar kialakítás miatt számos hasznos funkció. Egyenetlen formájú tárgyak cipelése Egyik kézben max 300g, két kézben akár 1 kg Nyomásérzékelő szenzorok segítségével képes: kézfogásra, tárgyak megfogására, egy kocsi tolására

12
Szenzorainak segítségével megállás nélkül, mozgás közben javítja pozícióját.
Ultrahangos szenzor: 3 méterre előre érzékeli az akadályokat ( üveget is, amit a vizuális nem képes ) Lézeres szenzor: a föld felszínt és az akadályokat érzékeli 2 méterrel a lába előtt. 2 kamera a fejben: környezet felismerés, pontos távolság meghatározás. Több tárgy mozgásának irányát és távolságát is képes meghatározni Mikrofonok: hangutasítások, hangok forrásának iránya, hang és zaj közti különbség felismerése- ha szólítják, vagy hirtelen zajt hall, odafordul. Képes felismerni kézmozdulatokat, gesztusokat, testtartást, arcokat ( 10 regisztrált arc megkülönböztetése )
 Lézeres szenzor: a föld felszínt és az akadályokat érzékeli 2 méterrel a lába előtt. 2 kamera a fejben: környezet felismerés, pontos távolság meghatározás. Több tárgy mozgásának irányát és távolságát is képes meghatározni. Mikrofonok: hangutasítások, hangok forrásának iránya, hang és zaj közti különbség felismerése- ha szólítják, vagy hirtelen zajt hall, odafordul. Képes felismerni kézmozdulatokat, gesztusokat, testtartást, arcokat ( 10 regisztrált arc megkülönböztetése )")
13
Mozgása Stabil akár hirtelen változások esetén is
Tárolt mozgási minták az indulásra, gyorsításra, állandó sebességgel való haladásra, lassításra, megállásra és fordulásra Ezeknek a kombinációival éri el a folyamatos finom mozgását Mozgása során, különösen a futásnál a robot teste hajlik, a törzse fordul ezzel stabillá téve mozgását és elkerüli az elcsúszást. Intelligent real-time flexible walking, környezetet érzékelő szenzorok- lépcsőn, lejtőn való mozgás

15
Alkalmazási területei
A robot fejlesztése nem fejeződött be Még mindig nincs általános otthoni használatban Jelenleg az elsőszámú funkciója tudomány népszerűsítése világszerte különböző eseményeken

16
Jövője Cél: emberek közötti alkalmazás
Öregek és mozgáskorlátozottak segítése Otthon, irodában Emberek számára veszélyes feladatok ellátása Ennek fontos feltétele, hogy a társadalom elfogadja a ezeket a robotokat és szerepüket

18
Források http://en.wikipedia.org/wiki/ASIMO#Form

Hasonló előadás