Lineáris algebra Mátrixok, determinánsok, lineáris egyenletrendszerek
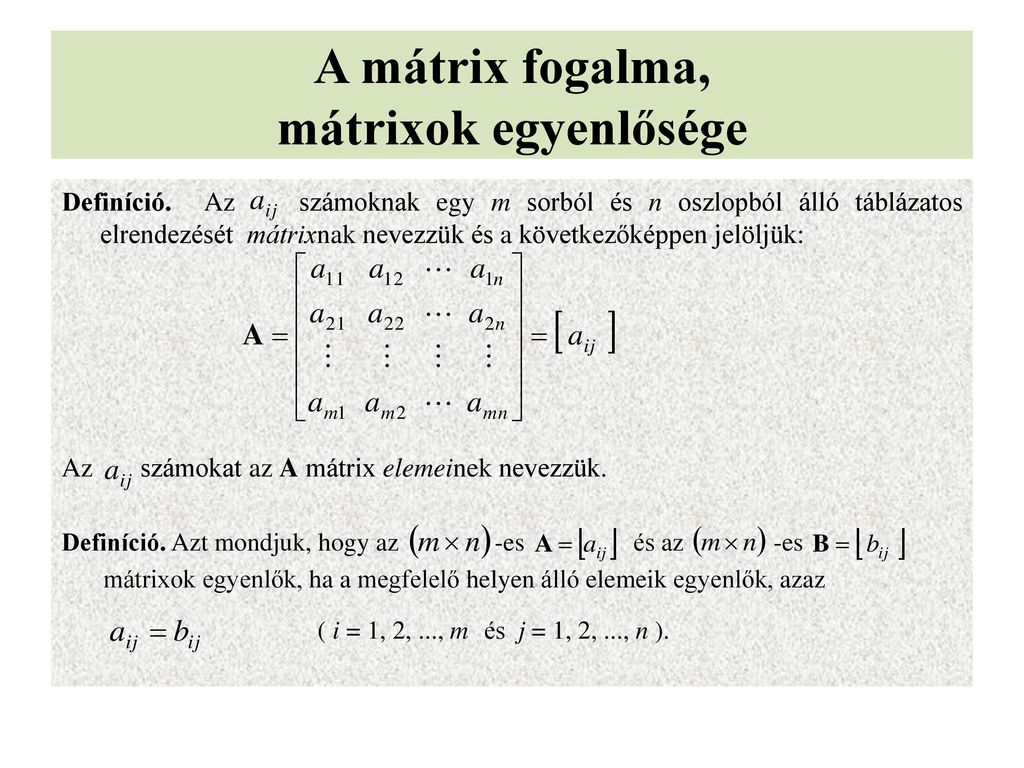
A mátrix fogalma, mátrixok egyenlősége Definíció. Az számoknak egy m sorból és n oszlopból álló táblázatos elrendezését mátrixnak nevezzük és a következőképpen jelöljük: Az számokat az A mátrix elemeinek nevezzük. Definíció. Azt mondjuk, hogy az -es és az -es mátrixok egyenlők, ha a megfelelő helyen álló elemeik egyenlők, azaz ( i = 1, 2, ..., m és j = 1, 2, ..., n ).
Speciális mátrixok Definíció. Az típusú mátrixokat, vagyis azokat, amelyeknek egyetlen oszlopa van, oszlopmátrixnak vagy oszlopvektornak nevezzük. Definíció. Az típusú mátrixokat, vagyis azokat, amelyeknek egyetlen sora van, sormátrixnak vagy sorvektornak nevezzük. Definíció. Az típusú mátrixokat négyzetes ( n-ed rendű kvadratikus,) mátrixoknak nevezzük. Definíció. Azt a mátrixot, amelynek minden eleme zérus, zérusmátrixnak nevezzük. Jele: 0. Definíció. Az A négyzetes mátrix elemei a mátrix főátlóját alkotják.
Speciális mátrixok Definíció. Az A négyzetes mátrixot diagonálmátrixnak nevezzük, ha a főátlóján kívül valamennyi eleme zérus. Definíció. Azt az -es diagonálmátrixot, amelynek minden főátlóban álló eleme 1, n-ed rendű egységmátrixnak nevezzük. Definíció. Az -es mártix transzponáltjának nevezzük azt a mátrixot, amelyet az oszlopok és sorok felcserélésével kapunk.
Mátrixok összeadása, számmal való szorzás Definíció. Az típusú és mátrixok összege az a mátrix, amelyre Megjegyzés. A definícióból következik, hogy csak azonos típusú mátrixok adhatók össze. Definíció. Az típusú -szorosa ( R ), az a mátrix, amelyre Példa. Adottak az , és mátrixok. Létezik-e olyan számpár, melyre
Műveleti tulajdonságok Tétel. Legyenek A és B -es mátrixok, és R. Ekkor 1./ ( kommutativitás ) 2./ ( asszociativitás ) 3./ 4./ 5./ 6./ 7./ Bizonyítás. A műveleti tulajdonságok a definíciókból és a valós számokra fennálló axiómákból következnek.
Mátrixok szorzása Definíció. Az -es és az -s mátrixok szorzatának nevezzük azt a -s mátrixot, amelyre Megjegyzések. A definíció következménye, hogy csak olyan mátrixok szorozhatók össze, amelyeknél az első mátrix oszlopainak száma megegyezik a második mátrix sorainak számával. Ebből azonnal következik, hogy a szorzás a mátrixok körében nem kommutatív művelet, fordított sorrendben adott esetben el sem végezhető a szorzás. Példa. Adottak a következő mátrixok: , , és . Mely műveletek végezhetők el a következők közül? AB; BA; BC; CD; DC; CDT; AD; DCT Végezzünk el néhányat az elvégezhetők közül!
A szorzás további műveleti tulajdonságai Tétel. Legyen -es, -s és -s mátrixok. Ekkor 1./ ( asszociativitás ) 2./ Legyenek most A -es, B és C -s típusú mátrixok. Ekkor 3./ ( disztributivitás ). Ha A és B -es és -s mátrixok, akkor 4./ ( disztributivitás ). Bizonyítás. A definíciók alapján az állítások egyszerű számítással igazolhatók.
Determinánsok Definíció. A másodrendű mátrix determinánsának nevezzük, és detA-val jelöljük a következő számot: Definíció. Az n-edrendű mátrix eleméhez tartozó minormátrixának nevezzük, és -val jelöljük azt az (n - 1)-edrendű mátrixot, melyet úgy kapunk A-ból, hogy annak i-edik sorát és k-adik oszlopát elhagyjuk. Definíció. Tegyük fel, hogy egy (n - 1)-edrendű mátrix determinánsát már értelmeztük. Az n-edrendű A mátrix deteminánsának nevezzük a következő számot:
Determinánsok Definíció. Az elem előjeles aldeterminánsán értjük a számot. Ezt felhasználva egy n-edrendű A mátrix determinánsa ami a determináns 1. sora szerinti kifejtése. Tétel. ( Kifejtési tétel ) Egy n-edrendű determináns tetszőleges sora szerint kifejthető, és Bizonyítás. A tételt nem bizonyítjuk.
Determinánsok tulajdonságai A következő tételeket konkrét számpéldával ( pl. 3x3-as determinánst használva), de az általánosságot nem elrontva igazoljuk. Tétel. Ha a determináns valamely sorának elemeit -val szorozzuk, a determináns értéke -szorosa lesz. Tétel. Ha egy determináns i-edik sorának minden eleme kéttagú összeg, akkor a determináns felbontható két olyan determináns összegére, melyből az első i-edik sorában az előbb említett összeg első tagjai, a második determináns i-edik sorában az összeg második tagjai szerepelnek, a többi elem változatlan. Tétel. Ha egy determináns egy sora csupa 0 elemet tartalmaz, akkor az értéke 0. Tétel. Ha egy determináns két sorát felcseréljük, a determináns értéke (-1)-szeresére változik. Tétel. Ha egy determináns két sora megegyezik, a determináns értéke 0. Tétel. Ha egy determináns valamely sorához hozzáadjuk valamely sor szorosát, determináns értéke nem változik.
Determinánsok tulajdonságai Tétel. Egy alsó, vagy ( felső ) háromszög determináns értéke a főátlóban álló elemek szorzata. Tétel. Az eddigiekben sorokra megfogalmazott tételek mindegyike oszlopokra is igazak. Példa: Számítsuk ki a következő determináns értékét! Megoldás:
Mátrixok inverze Definíció. Az A négyzetes mátrixot regulárisnak nevezzük, ha determinánsa nem nulla. Ha az A négyzetes mátrix determinánsa 0, akkor szingulárisnak nevezzük. Definíció. Ha az A négyzetes mátrixhoz hozzárendelhető egy olyan szimbólummal jelölt mátrix, amely kielégíti az egyenlőséget, akkor az A mátrixot invertálhatónak, az -et pedig A inverzének nevezzük. Definíció. Az A n-edrendű mátrix adjungáltjának nevezzük és -gal (adjA) jelöljük azt az -es mátrixot, amelynek elemeit úgy kapjuk, hogy a mátrix minden egyes elemének helyére az elemhez tartozó előjeles aldeterminánst helyettesítjük, majd a kapott mátrixot transzponáljuk. Tétel. Ha A reguláris mátrix, akkor létezik és egyértelmű az az mátrix, amely az A inverze, és
A mátrix rangja Definíció: Minden nem zérus mátrixhoz hozzárendelhető egy természetes szám, amit a mátrix rangjának nevezünk és ρ(A)-val jelöljük. Az A mátrix rangja r, ha található benne legalább egy r-ed rendű nem 0 determináns, de minden r+1-ed rendű determináns értéke 0. Általában a mátrix rangjának meghatározása nehézkes, ezért a mátrixon olyan átalakításokat hajtunk végre, amelyek a rangjának kiszámításához szükséges determinánsok zérus, vagy nem zérus voltát nem befolyásolják. Ezek az elemi átalakítások pl. a Gauss eliminációnál használt átalakítások. Példa: Határozzuk meg a következő mátrix rangját! Megoldás:
Lineáris egyenletrendszerek Definíció. Lineáris egyenletrendszeren olyan egyenletrendszert értünk, amely véges sok elsőfokú egyenletből áll, és véges sok ismeretlent tartalmaz. Így a lineáris egyenletrendszer általános alakja: ahol m : az egyenletek száma, n : az ismeretlenek száma, : az egyenletek konstansai, : az ismeretlenek, : az együtthatók.
Lineáris egyenletrendszerek Vezessük be a következő jelöléseket: A mátrix szorzás segítségével könnyen belátható, hogy a lineáris egyenletrendszer az alábbi mátrixegyenletes alakban is felírható: Definíció. Ha b = 0, akkor az egyenletrendszert homogénnek, ellenkező esetben inhomogénnek nevezzük. Definíció. Az A mátrixot az egyenletrendszer mátrixának nevezzük. A következőkben azzal a legfontosabb esettel foglalkozunk, amikor az egyenletek és az ismeretlenek száma megegyezik, azaz n = m, és az egyenletrendszer inhomogén.
Lineáris egyenletrendszer megoldása Gauss-eliminációval A következőkben olyan módszert ismertetünk az egyenletrendszerek megoldására, amely tetszőleges lineáris egyenletrendszer esetén is alkalmazható. ( A tárgyalás során az egyszerűség és a további felhasználás szempontjából fontos n = m esetet fogjuk vizsgálni .) Gauss-elimináció. Az eljárás lényege az, hogy az egyenletrendszert úgy alakítjuk át, hogy a vele ekvivalens (redukált)
Lineáris egyenletrendszer megoldása Gauss-eliminációval egyenletrendszerhez jussunk, amelyből a gyököket fordított sorrendben kapjuk meg. Az eljárást mintapéldákon keresztül mutatjuk be. Példa (1): Oldjuk meg Gauss-eliminációval a következő egyenletrendszert: Megoldás:
Lineáris egyenletrendszer megoldása Gauss-eliminációval Példa (2): Oldjuk meg Gauss-eliminációval a következő egyenletrendszert: Megoldás: A kibővített mátrix: A négy ismeretlen kiszámításához csak két egyenletünk van, ami azt jelenti, hogy két ismeretlent szabadon választhatunk. Így
Lineáris egyenletrendszer megoldása Gauss-eliminációval Példa (3): Oldjuk meg Gauss-eliminációval a következő egyenletrendszert: Megoldás: A redukált mátrix: amiből látható, hogy az egyenletrendszernek nincs megoldása, hiszen az utolsó egyenlet: , ami ellentmondás. Felmerül tehát a kérdés mikor oldható meg egy lineáris egyenletrendszer?
Lineáris egyenletrendszer megoldhatósága Jelöljük az egyenletrendszer együtthatóiból álló mátrixot A-val, B-vel pedig az egyenletrendszer kibővített mátrixát. Bizonyítás nélkül közöljük a következő tételeket: Tétel: Egy lineáris egyenletrendszernek akkor és csak akkor van megoldása (a, ha a mátrixának és kibővített mátrixának rangja megegyezik: Ezért nincs megoldása a példa (3)-nak Tétel: Egy megoldható lineáris egyenletrendszernek akkor és csak akkor van egyértelmű megoldása, ha mátrixának rangja megegyezik az ismeretlenek számával. példa (1) Tétel: Egy megoldható lineáris egyenletrendszer mátrixának rangja kisebb az ismeretlenek számánál, akkor végtelen sok megoldása van és a megoldás során számú ismeretlen szabadon választható meg. Ezek a szabad ismeretlenek. példa (2)
Lineáris egyenletrendszer megoldása a mátrix inverz felhasználásával Definíció. A négyzetes A mátrix determinánsát az egyenletrendszer determinánsának nevezzük, és D-vel jelöljük. Vizsgáljuk most azt az esetet, amikor A reguláris mátrix, azaz . Szorozzuk meg az egyenlet mindkét oldalát balról az A inverzével. Ekkor , azaz Az x megoldás további vizsgálatához emlékezzünk arra, hogy a reguláris A mátrix inverze a következőképpen írható fel: ahol az elemhez tartozó aldeterminánsa.
Lineáris egyenletrendszerek Ezt felhasználva, az mátrixszorzás elvégzése után, a mátrixegyenlőséget figyelembe véve a következők adódnak: Vegyük észre, hogy az kifejezéseiben a számlálóban lévő összeg annak az n-edrendű determinánsnak az első, második, ..., n-edik oszlop szerinti kifejtése, amelynek ezen oszlopában a b vektor áll, a többi oszlopa pedig megegyezik az A mátrix oszlopaival. Ezzel bebizonyítottuk a következő tételt:
Lineáris egyenletrendszer megoldása Cramer-szabállyal Tétel. ( Cramer szabály ) Ha a lineáris egyenletrendszer determinánsa nem zérus, akkor az egyenletrendszernek egyetlen megoldása van, melyet úgy számíthatunk ki, hogy az egyenletrendszer D determinánsával elosztjuk azt a determinánst, amely D-ből úgy keletkezik, hogy a k-adik oszlop helyébe az egyenletrendszer jobb oldalán álló mennyiségeket írjuk. Példa: Oldjuk meg Cramer-szabállyal a következő egyenletrendszert:
Homogén lineáris egyenletrendszerek A homogén lineáris egyenletrendszer általános alakja, mint láttuk: Nyilvánvaló, hogy az egyenletrendszer mindig megoldható, ugyanis az az egyenletrendszer egy megoldását adja. Definíció. Az egyenletrendszer fenti megoldását triviális megoldásnak nevezzük. Tétel. A homogén lineáris egyenletrendszernek n = m esetén akkor és csak akkor van a triviálistól eltérő megoldása, ha az egyenletrendszer determinánsa nulla. Megjegyzés. Ha , akkor a Cramer-szabályt alkalmazva nyilván a triviális megoldás adódik.
Homogén lineáris egyenletrendszerek Példa: Oldjuk meg Gauss-eliminációval a következő homogén lineáris egyenletrendszert:
Mátrix sajátvektora és sajátértéke Tekintsük a következő A mátrixot. Definíció: Az számot és az vektort az A mátrix sajátértékének és sajátvektorának nevezzük, ha teljesül a egyenlőség. Megjegyzés: Ha egy s vektor sajátvektor, akkor nyilvánvalóan tetszőleges - szorosa is sajátvektor, amely ugyanahhoz a sajátértékhez tartozik. Az s és az sajátvektorokat nem tekintjük lényegesen különbözőknek.
Mátrix sajátvektora és sajátértéke Az előbbi egyenletet átrendezve kapjuk a egyenletet. Definíció. - Az mátrixot az A karakterisztikus mátrixának, - a determinánst az A mátrix karakterisztikus polinomjának, vagy karakterisztikus determinánsának, - a egyenletet pedig az A mátrix karakterisztikus egyenletének nevezzük. Mint azt láttuk, az A mátrix sajátvektorainak meghatározásához meg kell oldanunk a mátrixegyenletet.
Mátrix sajátvektora és sajátértéke E mátrixegyenletnek megfelelő homogén lineáris egyenletrendszer: Ennek akkor van a triviálistól különböző megoldása, ha a determinánsa 0. Tehát
Mátrix sajátvektora és sajátértéke A determinánst kifejtve -ra nézve egy pontosan n-edfokú polinomot kapunk, amelyet, mint láttuk az A mátrix karakterisztikus polinomjának nevezünk. A egyenletet , mint láttuk az A mátrix karakterisztikus egyenletének nevezzük. Ennek gyökei a sajátértékek. Az így kapott sajátértékeket visszahelyettesítjük a homogén lineáris egyenletrendszerbe, amit megoldva kapjuk a sajátvektorokat. Mivel azonban a karakterisztikus egyenletrendszer homogén lineáris, amelynek a nem triviális megoldásait keressük, ezért a sajátvektorok irányát tudjuk csak megadni, nagyságukat nem. Példa: Határozzuk meg az sajátértékeit és sajátvektorait!
A Gauss-Jordan elimináció Alkalmazás mátrix inverz kiszámítására Bővítsük ki az A mátrixot az E egységmátrixszal, majd a mátrixműveletek segítségével alakítsuk úgy, hogy a mátrixból az egységmátrixot kapjuk. Ekkor az egységmátrixból az eredeti mátrix inverzéhez jutunk. Példa: Számítsuk ki az mátrix inverzét!
A Gauss-Jordan elimináció Alkalmazás egyenletrendszer megoldására Bővítsük ki az A mátrixot a b vektorral (a konstansok oszlopvektora), majd a mátrixműveletek segítségével alakítsuk úgy, hogy a mátrixból az egységmátrixot kapjuk. Ekkor az oszlopvektor elemei helyén az egyenletrendszer megoldását kapjuk, hiszen Példa: Oldjuk meg a következő egyenletrendszert!