Előadást letölteni
Az előadás letöltése folymat van. Kérjük, várjon

1
Irányítástechnika 5. előadás
Dr. Kovács Levente

2
Tartalom Empirikus szabályozótervezés Ziegler-Nichols szabály
kísérleti identifikáción alapuló stabilitás határának elérésén alapuló Kessler módszerek modulusz kritérium szimmetrikus kritérium P, PI soros kompenzátor tervezése Soros kompenzáció P kompenzáció PI kompenzáció

3
beavatkozó / irányító jel
zavarás d beavatkozó / irányító jel u Ref. r hiba e kimenet y Szabályozó Folyamat Feedback jel / visszacsatolás Érzékelő

4
Alapvető szabályozási követelmények
Klasszikus szabályozások: stabilitás & minőség bizonytalanságok Jó jelkövetés zavarelhárítás u irányító jel szándékolt módosítása

5
Tartalom Empirikus szabályozótervezés Ziegler-Nichols szabály
kísérleti identifikáción alapuló stabilitás határának elérésén alapuló Kessler módszerek modulusz kritérium szimmetrikus kritérium P, PI soros kompenzátor tervezése Soros kompenzáció P kompenzáció PI kompenzáció

6
Empirikus szabályozótervezés célja
Mikor? Ha kevés információnk van a folyamatról Kevés a mérés, nincs identifikáció, DE irányítani kell! Hogyan? Kikísérletezett „táblázat-alapú sablonok” Folyamat jellege mondja meg a szabályozó típusát

7
Lehetőségek Ziegler-Nichols szabály Kessler módszerek
kísérleti identifikáción alapuló stabilitás határának elérésén alapuló Kessler módszerek modulusz kritérium szimmetrikus kritérium Chien-Hrones-Reswick, Oppelt, Strejc módszer

8
Ziegler-Nichols szabály
kísérleti identifikáción alapuló stabilitás határának elérésén alapuló Kessler módszerek modulusz kritérium szimmetrikus kritérium

9
Kísérleti identifikáció alapú ZR módszer
Folyamat átviteli függvénye: Tm = [OA] T = [AB]

10
Szabályozók paraméterei
Táblázat Szab. típusa Szabályozók paraméterei kR ∙kP ∙ρ Ti Td P ≤ 1 - PI ≤ 0,9 3 Tm PID ≤ 1,2 2 Tm Tm a relatív holtidőt jelenti

11
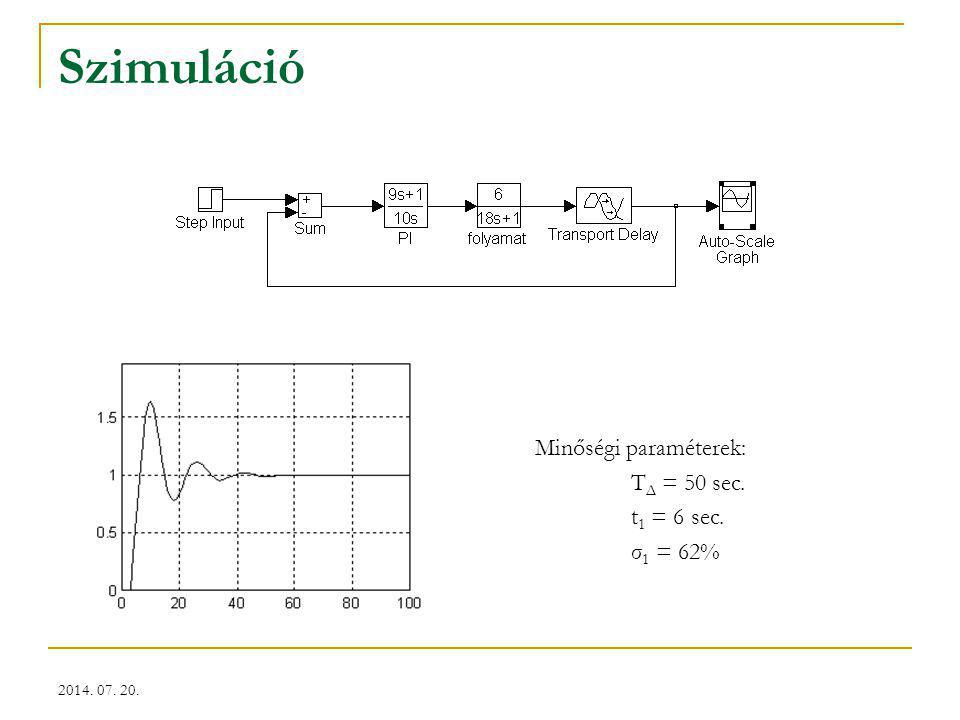
Példa Tm=3 sec T= 18 sec kP= 6

12
Szabályozók paraméterei
PI szabályozó Szab. típusa Szabályozók paraméterei kR ∙kP ∙ρ Ti Td PI ≤ 0,9 3 Tm - = Tm / T = 1/6 Ti = 3 Tm = 9 kr 0,9

13
Szimuláció Minőségi paraméterek: TΔ = 50 sec. t1 = 6 sec. σ1 = 62%
14
Ziegler-Nichols szabály
kísérleti identifikáción alapuló stabilitás határának elérésén alapuló Kessler módszerek modulusz kritérium szimmetrikus kritérium

15
Klasszikus ZR szabály stabilitás határának elérésén alapszik
nem szükséges a folyamat matematikai modelljének ismerete ! A módszer lépései: A zárt kört egy változtatható arányos taggal zárjuk be; A rendszert a stabilitás határára hozzuk (kRP0 ); a kRP0 esetére leolvassuk a lengések periódusát (T0).
; a kRP0 esetére leolvassuk a lengések periódusát (T0)")
16
Szabályozók parméterei
Táblázat Szab. típusa Szabályozók parméterei kR Ti Td P 0,5 kRP0 – PI 0,45 kRP0 0,85 T0 PID 0,6 kRP0 0,5 T0 0,125 T0

17
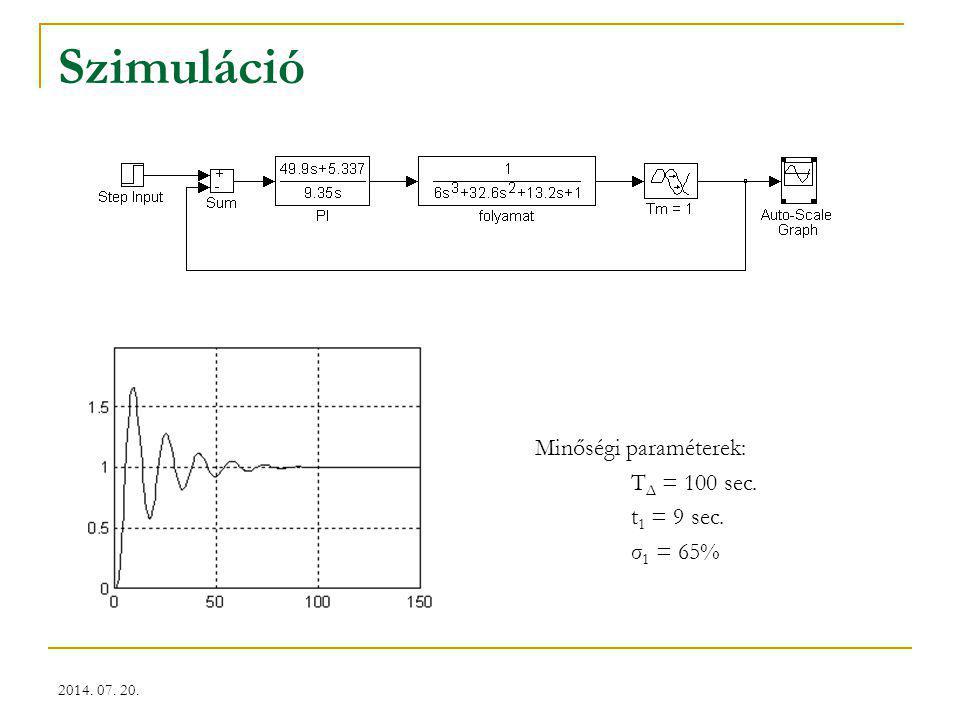
Példa Feladat: PI szabályozó tervezése (Tm = 1 sec.)
")
18
Stabilitás határának elérése
kRP0 = 11,86 Periódusidő T0 = 11 sec.

19
Szabályozók parméterei
PI szabályozó Szab. típusa Szabályozók parméterei kR Ti Td PI 0,45 kRP0 0,85 T0 - kR = 0,45 kRP0 = 5,337 Ti = 0,85 T0 = 9,35

20
Szimuláció Minőségi paraméterek: TΔ = 100 sec. t1 = 9 sec. σ1 = 65%
21
Ziegler-Nichols szabály
kísérleti identifikáción alapuló stabilitás határának elérésén alapuló Kessler módszerek modulusz kritérium szimmetrikus kritérium

22
Kessler-féle kritériumok
A rendszer nem tartalmaz holtidőt (ha igen, közelíteni kell, pl. Pade). A folyamat átviteli függvénye relatív egyszerű. A rendszer paraméterei ne változzanak túlzottan. Az elérhető minőségi követelmények relatív adottak. 2 féle kritérium: Modulusz kritérium Szimmetrikus kritérium.
. A folyamat átviteli függvénye relatív egyszerű. A rendszer paraméterei ne változzanak túlzottan. Az elérhető minőségi követelmények relatív adottak. 2 féle kritérium: Modulusz kritérium. Szimmetrikus kritérium")
23
Zárt rendszer á.f. típusok
Optimális esetek: 2 a0 a2 = a12 2 a1 a3 = a22

24
Megjegyzés Kis időállandók tétele:
egy átviteli függvény kis időállandós tagjai helyettesíthetőek egyetlen taggal, melynek időállandója egyenlő a kis időállandók összegével. az átviteli függvénye egy egyszerűbb formára hozható.

25
Ziegler-Nichols szabály
kísérleti identifikáción alapuló stabilitás határának elérésén alapuló Kessler módszerek modulusz kritérium szimmetrikus kritérium

26
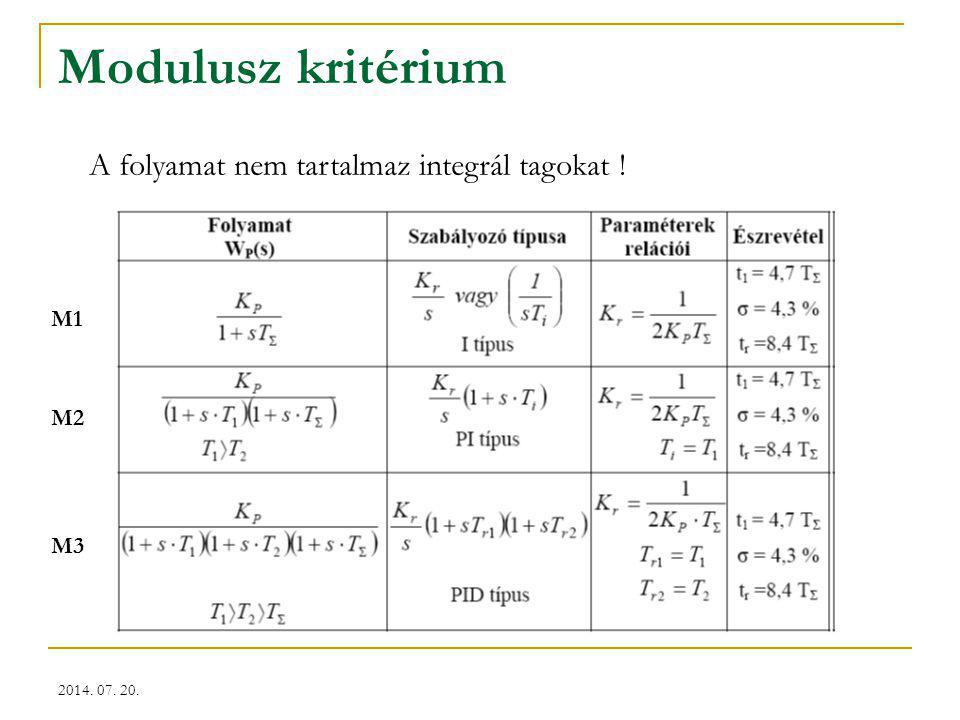
Modulusz kritérium A folyamat nem tartalmaz integrál tagokat ! M1 M2
27
Megjegyzések A három kritérium esetében a szabályozási hiba nulla !
Ha e ≠ 0, akkor másik kritérium alkalmazható: M4: az M2 (PI típus) alapú szabályozót P típusú szabályozóval helyettesítjük.
 alapú szabályozót P típusú szabályozóval helyettesítjük")
28
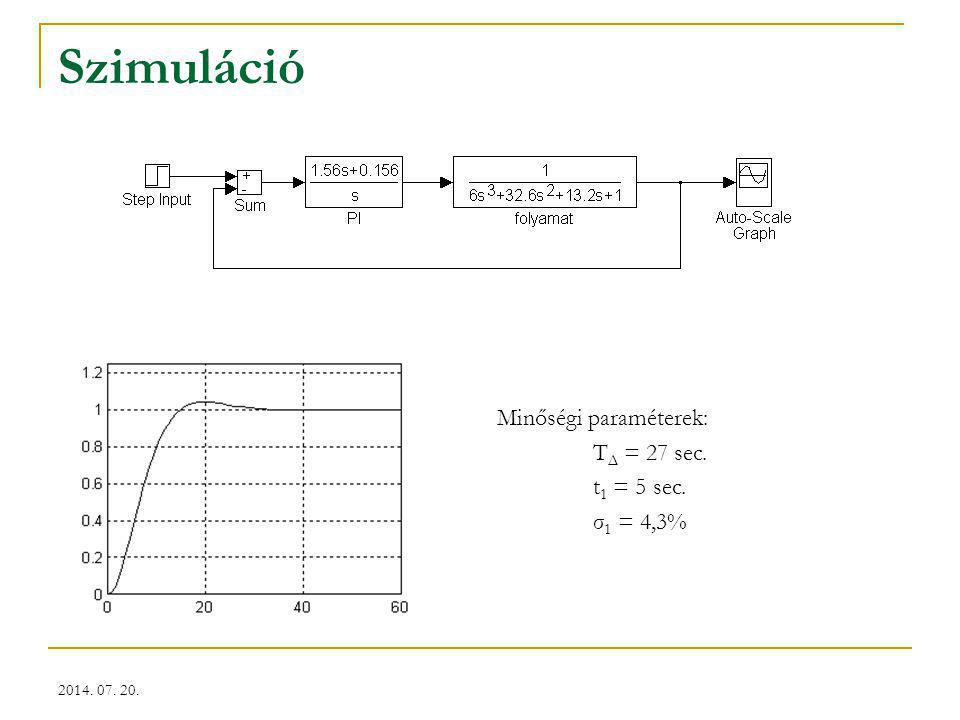
Példa Feladat: PI szabályozó tervezése (Tm = 0 sec.)
")
29
PI szabályozó A folyamat táblázathoz való illesztése: Ti = T1 = 10
T = T2 + T3 = 3 + 0,2 = 3,2 (kis időáll. tétele) Kp = 1 PI =
 Kp = 1. PI =")
30
Szimuláció Minőségi paraméterek: TΔ = 27 sec. t1 = 5 sec. σ1 = 4,3%
31
Ziegler-Nichols szabály
kísérleti identifikáción alapuló stabilitás határának elérésén alapuló Kessler módszerek modulusz kritérium szimmetrikus kritérium

32
Szimmetrikus kritérium
A folyamat: tartalmaz egy integrátort egy nagy időállandót (a többihez viszonyítva) S1 S2
 S1. S")
33
A kritérium kiterjesztése
Miért: a relatív rossz minőségi jellemzők miatt Általánosítás: m2 = β m3 = α Tr =βTΣ 4 < β < (β = 4 az eredeti eset)
")
34
Gyors rendszer Lassú rendszer

35
Empirikus szabályozótervezés – Összefoglalás
Előnyök: Egyszerű módszerek Gyors szabályozótervezés Hátrányok: Csak adott típusú folyamatokra alkalmazhatók Relatív behatároltak a minőségi követelmények Nem optimális módszerek

36
Tartalom Empirikus szabályozótervezés Ziegler-Nichols szabály
kísérleti identifikáción alapuló stabilitás határának elérésén alapuló Kessler módszerek modulusz kritérium szimmetrikus kritérium P, PI soros kompenzátor tervezése Soros kompenzáció P kompenzáció PI kompenzáció

37
Soros kompenzáció A szabályozott folyamattal sorba kapcsolt szabályzó a felnyitott kör átviteli függvényét a megkívánt alakra hozza A folyamat egyes zérusainak és pólusainak hatását részben vagy egészében semlegesíti Helyettük új zérusokat ill. pólusokat hoz be a rendszerbe A folyamat pólusait ill. zérusait mintegy „áthelyezi” Kimenetről való visszacsatolás A tervezés idő- és frekvenciatartományban egyaránt megoldható wc(s) - wp(s) y(s) yh(s) ua(s) u(s)
 - wp(s) y(s) yh(s) ua(s) u(s)")
38
Tartalom Empirikus szabályozótervezés Ziegler-Nichols szabály
kísérleti identifikáción alapuló stabilitás határának elérésén alapuló Kessler módszerek modulusz kritérium szimmetrikus kritérium P, PI soros kompenzátor tervezése Soros kompenzáció P kompenzáció PI kompenzáció

39
P kompenzáció A legegyszerűbb kompenzáló szerv
A felnyitott kör átviteli függvénye kc - wp(s) y(s) yh(s) ua(s) u(s) w0(s) A felnyitott kör Bode diagramjában a fázisgörbe nem változik az amplitúdó görbe a kc erősítési tényezőnek megfelelően, wp(s) görbéjéhez képest eltolódik |H|dB = 20 lg k
 y(s) yh(s) ua(s) u(s) w0(s) A felnyitott kör Bode diagramjában. a fázisgörbe nem változik. az amplitúdó görbe a kc erősítési tényezőnek megfelelően, wp(s) görbéjéhez képest eltolódik. |H|dB = 20 lg k.")
40
P kompenzáció 60°-os jt-re törekszünk
Ehhez -120°-os fázisszög tartozik Megkeressük a hozzá tartozó w-t Leolvassuk ezen az w-án az erősítést Mivel a fázisgörbe nem változik 17,6 dB-el megnövelve a kör- erősítést az amplitúdógörbe pont ezen az w-án fogja metszeni a 0dB-es tengelyt Vagyis 60°-lesz a jt -17,6 dB 0,6 rad/s -120° jt = 60°

41
P kompenzáció A zárt kör átviteli függvénye
12% 16% A zárt kör csak statikus hibával tudja követni az alapjelet hs = 12 % st = 16% A túllendülés az elvártnál nagyobb lett Próbálgatással tovább hangoljuk a szabályzó paramétert kc = 6 értéket választva megkapjuk a kívánt kb. 10%-os túllendülést

42
P kompenzáció Az irányító jel
Az u(t) irányító jel a tranziens folyamat jelentős részében meghaladja az állandósult értékét Ez a dinamikus túlvezérlés a rendszer gyorsításának eszköze A rendszer vágási frekvenciájának növelésével csökkentjük a beállási időt u(t)
 irányító jel a tranziens folyamat jelentős részében meghaladja az állandósult értékét. Ez a dinamikus túlvezérlés a rendszer gyorsításának eszköze. A rendszer vágási frekvenciájának növelésével csökkentjük a beállási időt. u(t)")
43
Tartalom Empirikus szabályozótervezés Ziegler-Nichols szabály
kísérleti identifikáción alapuló stabilitás határának elérésén alapuló Kessler módszerek modulusz kritérium szimmetrikus kritérium P, PI soros kompenzátor tervezése Soros kompenzáció P kompenzáció PI kompenzáció

44
PI kompenzáció A zárt kör statikus hibája a felnyitott kör erősítésének növelésével csökkenthető A valóságos folyamatok bemenő jelét azonban nem növelhetjük minden határon túl Az erősítés növelésével a rendszer instabillá válhat A felnyitott kör kisfrekvenciás viselkedését integráló jellegűvé tesszük A típusszámát 1-el növeljük Egységugrás bemenetre a statikus hiba zérus lesz u(s) yh(s) u(s) yh(s) kc az arányos csatorna erősítése TI az integrálási idő Egységugrás bemenő jelnél TI elteltével a az integráló csatorna kimenete egyenlővé válik az arányos csatorna kimenetével 1/TI-nél kisebb frekvenciákon integráló, az azoknál nagyobb frekvenciákon arányos a tag viselkedése
 yh(s) u(s) yh(s) kc az arányos csatorna erősítése. TI az integrálási idő. Egységugrás bemenő jelnél TI elteltével a az integráló csatorna kimenete egyenlővé válik az arányos csatorna kimenetével. 1/TI-nél kisebb frekvenciákon integráló, az azoknál nagyobb frekvenciákon arányos a tag viselkedése.")
45
PI kompenzáció |H|dB = 20 lg k – 20 lg arg{H} = - π/2
A nyitott kör alacsony frekvenciás viselkedése integráló tulajdonságú lesz A PI kompenzációhoz hasonlóan az amplitúdó görbét függőleges irányban önmagával párhuzamosan eltolja A legalacsonyabb frekvenciájú sarokpontot a szabályzóval w = 0 frekvenciára helyezzük át úgy hogy a P kompenzációval beállított dinamika közel változatlan maradjon w1 = 1/TI = 1/10

46
PI kompenzáció wc = 0,52 rad/s jt = 56,2°

47
PI kompenzáció A zárt kör átviteli függvénye ht = 0 % st = 12%

48
Köszönöm a figyelmet!

Hasonló előadás



















