Előadást letölteni
Az előadás letöltése folymat van. Kérjük, várjon

1
Mintavételi gyakoriság megválasztása
Ha a cél: Átlag (középérték) meghatározása Trend detektálása Folytonos idősor visszaállítása
 meghatározása. Trend detektálása. Folytonos idősor visszaállítása.")
2
Átlag becslése Mintanagyság meghatározása átlagbecsléshez egyszerű véletlen mintánál: N = a sokaság elemszáma n = a minta elemszáma σ = sokasági szórás D: a maximális hiba (hibahatár) vagy Autokorrelált (nem független) mintáknál: N → N* és σ → σ*
 vagy. Autokorrelált (nem független) mintáknál: N → N* és σ → σ*")
3
Autokorreláció Egy idősor jelenlegi és későbbi értékei közötti kapcsolat mértékét fejezi ki, Idősoron belüli kapcsolat szorosságát jellemzi, Autokorrelációs tényező ( x(t) idősor, várható érték): Általános (k lépés): Autokorrelációs függvény: Egy idősor autokorreláció függvénye a = 0 .. n értékekhez tartozó r autokorreláció tényezőkből áll.
 idősor, várható érték): Általános (k lépés): Autokorrelációs függvény: Egy idősor autokorreláció függvénye a = 0 .. n értékekhez tartozó r autokorreláció tényezőkből áll.")
4
Tipikus autokorreláció függvények
-2 -1.5 -1 -0.5 0.5 1 1.5 2 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 -1 -0.8 -0.6 -0.4 -0.2 0.2 0.4 0.6 0.8 1 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 Véletlenszerű (normális eloszlású független sorozat) -0.3 -0.2 -0.1 0.1 0.2 0.3 0.4 0.5 0.6 0.7 1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 -1 -0.8 -0.6 -0.4 -0.2 0.2 0.4 0.6 0.8 1 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 Autokorrelált (véletlen sorozat mozgóátlaga) -1.5 -1 -0.5 0.5 1 1.5 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 -1 -0.8 -0.6 -0.4 -0.2 0.2 0.4 0.6 0.8 1 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 Periodikus (szinusz függvény, zajmentes)
 Autokorrelált. (véletlen sorozat mozgóátlaga) Periodikus. (szinusz függvény, zajmentes)")
5
Fehér zaj autokorreláció függvénye:
Az xt stacionárius sztochasztikus folyamat gaussi fehérzaj, ha minden t-re standard normális eloszlású. Az xt sztochasztikus folyamat akkor stacionárius, ha az xt ( t [ t1; t2 ] T ) eloszlása független a [ t1; t2 ] kiválasztásától. Fehér zaj autokorreláció függvénye: -1 -0.8 -0.6 -0.4 -0.2 0.2 0.4 0.6 0.8 1 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 Egy xt gaussi fehérzaj folyamat autokorreláció függvénye a Dirac-féle egységugrás függvény. if(t==0) r[t]=1; else r[t]=0; -1 -0.8 -0.6 -0.4 -0.2 0.2 0.4 0.6 0.8 1 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 Egy valós fehérzaj folyamat autokorreláció függvénye csak a 0 helyen lép ki az Anderson-féle konfidencia intervallumból.
 eloszlása független a [ t1; t2 ] kiválasztásától. Fehér zaj autokorreláció függvénye: Egy xt gaussi fehérzaj folyamat autokorreláció függvénye a Dirac-féle egységugrás függvény. if(t==0) r[t]=1; else r[t]=0; Egy valós fehérzaj folyamat autokorreláció függvénye csak a 0 helyen lép ki az Anderson-féle konfidencia intervallumból.")
6
Autokorrelációs függvény

7
Autokorrelációs függvény

8
Autokorreláció figyelembe vétele a mintavételezésnél
Az idősor elemei nem függetlenek Az észlelési adatok száma (elemszám, N) helyettesítendő N*-gal: ahol r(t) a t eltolású autokorrelációs tényező A szórás számítása: Vagyis, az effektív mintaszám egymástól nem független megfigyelési adatok esetén (Bayley & Hammersley, 1946): N* = N σ / σ*
 helyettesítendő N*-gal: ahol r(t) a t eltolású autokorrelációs tényező. A szórás számítása: Vagyis, az effektív mintaszám egymástól nem független megfigyelési adatok esetén (Bayley & Hammersley, 1946): N* = N σ / σ*")
9
Lettenmaier (1976) egylépéses autoregresszív modellel meghatározta az n és n* közötti összefüggést:
n* < n Ahol: n a mintaszám, k a mintavételek közti intervallum, ρ az autokorrelációs tényező Effektív mintaszám (n*) az autokorrelációtól függően: n k ρ= 0,9 ρ= 0,7 ρ= 0,5 ρ= 0,3 ρ= 0,1 365 1 20 65 122 197 299 183 2 63 110 153 179 3 60 95 116 91 4 19 56 80 90 73 5 52 69 61 6 48 59 7 44 51 26 14 17 12 30 11
 az autokorrelációtól függően: n. k. ρ= 0,9. ρ= 0,7. ρ= 0,5. ρ= 0,3. ρ= 0,")
10
független és autokorrelált adatsor esetén
Éves átlag becslésére vonatkozó standard hiba változása az effektív mintaszámtól függően, független és autokorrelált adatsor esetén ρ =0 ρ =0.3 ρ =0.5 ρ =0.7 n Sn/S1 n* 365 1,0 197 122 65 183 1,4 153 1,1 110 63 1,7 116 1,3 95 60 91 2,0 90 1,5 80 1,2 56 73 2,2 1,6 69 52 61 2,4 1,8 59 48 2,6 1,9 51 44 26 3,7 2,8 12 5,5 4,1 3,2 2,3 n - mintaszám, n* - effektív mintaszám, ρ - autokorrelációs tényező, S1 – éves átlag standard hibája n=365 mérési adatból, Sn – éves átlag standard hibája n (n*) mérési adatból
 mérési adatból.")
11
Trend detektálásához szükséges adatszám
A trend detektálásának erőssége: lépésköz, illetve lineáris trendnél a növekmény: tr = N*t0 szórás Lettenmaier (1976), Somlyódy et al. (1986)
, Somlyódy et al. (1986)")
12
Folytonos idősor előállítása diszkrét észlelésekből
Nyquist tétele: Egy adott, frekvenciakorlátos spektrumú, folytonos idősor, amely az fk határfrekvencián túl nem tartalmaz spekrtális összetevőket, egyértelműen visszaállítható a t=fk/2 intervallumnál kisebb mintavételezési idejű diszkrét idősorból (Szőlősi-Nagy, 1976). A határfrekvencia (spektrumfüggvény) az idősor autokorreláció függvényének Fourier transzformáltjából állítható elő. Nyquist intervallum: Maximális időintervallum, mely esetén egyenlő időközönkénti mintavétellel a jel meghatározható. A mintában szereplő jel legmagasabb frekvenciájú összetevője kétszeresének a reciproka. folytonos jel, a jel Fourier transzformáltja: A jel sávszélessége (B), ahol Mintavételi frekvencia (határfrekvencia): Mintavételi időköz:
. A határfrekvencia (spektrumfüggvény) az idősor autokorreláció függvényének Fourier transzformáltjából állítható elő. Nyquist intervallum: Maximális időintervallum, mely esetén egyenlő időközönkénti mintavétellel a jel meghatározható. A mintában szereplő jel legmagasabb frekvenciájú összetevője kétszeresének a reciproka. folytonos jel, a jel Fourier transzformáltja: A jel sávszélessége (B), ahol. Mintavételi frekvencia (határfrekvencia): Mintavételi időköz:")
13
Trend detektálásához szükséges adatszám (független minták száma az N0 időtartam alatt)
autokorrelációs tényező lépésköz (intervallum) szórás Lettenmaier (1976), Somlyódy et al. (1986)
 szórás. Lettenmaier (1976), Somlyódy et al. (1986)")
14
Idősorok elemzése Determinisztikus és sztochasztikus komponensek, előrejelzés autoregresszív modellel Forrás: Hidrológia II HEFOP oktatási segédanyag (

15
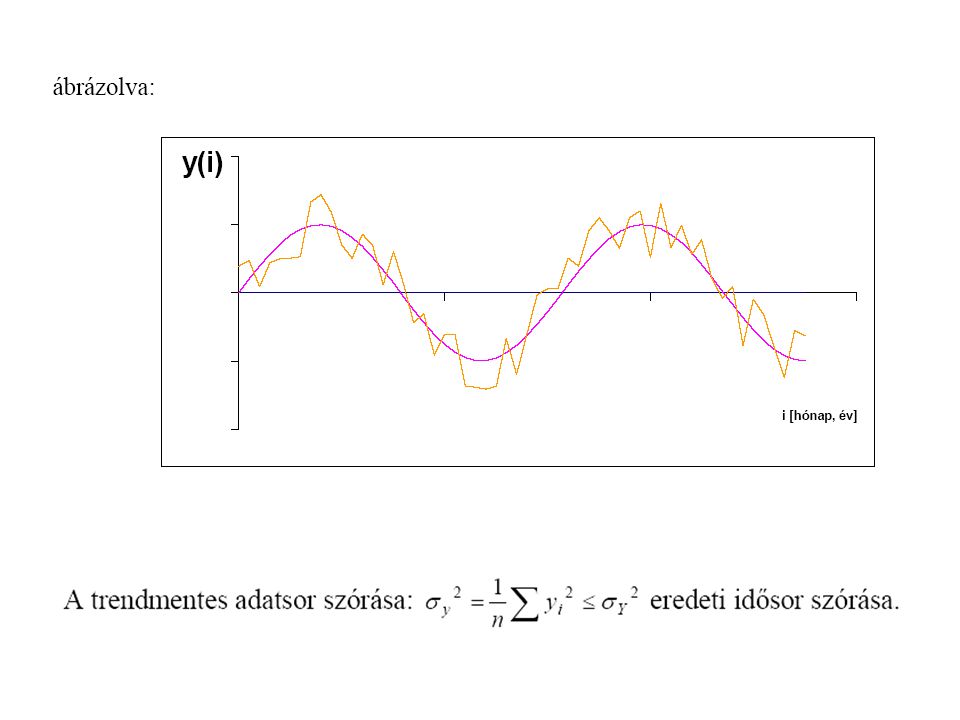
Idősorok felbontása: Y(i) = T(i) + P(i) + A(i) T(i) trend komponens
P(i) periodikus tag A(i) maradéktag determinisztikus sztochasztikus (autoregresszív és véletlen)
 periodikus tag. A(i) maradéktag. determinisztikus. sztochasztikus (autoregresszív és véletlen)")
16
Trendszámítás Lineáris: T(i)=a0 + a1 i
Nem lineáris: T(i)=a0 + a1 i + a2 i2 + … + an in Lineáris trend:
=a0 + a1 i + a2 i2 + … + an in. Lineáris trend:")
18
Példa: vízminőségi trend számítás
Segédtáblázat: Évszám c [mg/l] t [év] ci-cátlag ti-tátlag (ci-cátlag)2 (ti-tátlag)2 (ci-cátlag) (ti-tátlag) 1991 1992 …. 2000 20,3 12,7 1 2 10 +/- értékeket kapunk cátlag = tátlag = = A trendvonal egyenlete:
2. (ti-tátlag)2. (ci-cátlag) (ti-tátlag) … ,3. 12, /- értékeket. kapunk. cátlag = tátlag = = A trendvonal egyenlete:")
19
A trend mértéke: P < 3 %/év kismértékű 3 < P < 7 %/év nagymértékű 7 < P < 15 %/év igen nagymértékű P > 15 %/év rendkívül nagymértékű -1.8 % /év +1.6 % /év

20
Ellenőrzés (regresszió számításból):
Reziduális szórás (abszolút hiba) kifejezi, hogy a regressziós becslések átlagosan mennyivel térnek el az y megfigyelt értékeitől. Relatív szórás (relatív hiba) kifejezi, hogy a regressziós becslések átlagosan hány %-al térnek el az y megfigyelt értékeitől. Pearson-féle lineáris korrelációs együttható: Kovariancia Determinációs együttható:
 kifejezi, hogy a regressziós becslések átlagosan mennyivel térnek el az y megfigyelt értékeitől. Relatív szórás (relatív hiba) kifejezi, hogy a regressziós becslések átlagosan hány %-al térnek el az y megfigyelt értékeitől. Pearson-féle lineáris korrelációs együttható: Kovariancia. Determinációs együttható:")
21
A trend mértéke: P < 3 %/év kismértékű 3 < P < 7 %/év nagymértékű 7 < P < 15 %/év igen nagymértékű P > 15 %/év rendkívül nagymértékű -1.8 % /év → dC = / 10év +1.6 % /év → dC = 0.1 / 10év D = r2 = 0.25, Se = 0.46 (dC = -0.82) D = r2 = 0.12, Se = (dC = 0.1)
 D = r2 = 0.12, Se = 0.16 (dC = 0.1)")
22
Power trend Általános formula: Linearizált: Szórás (hiba):
:")
23
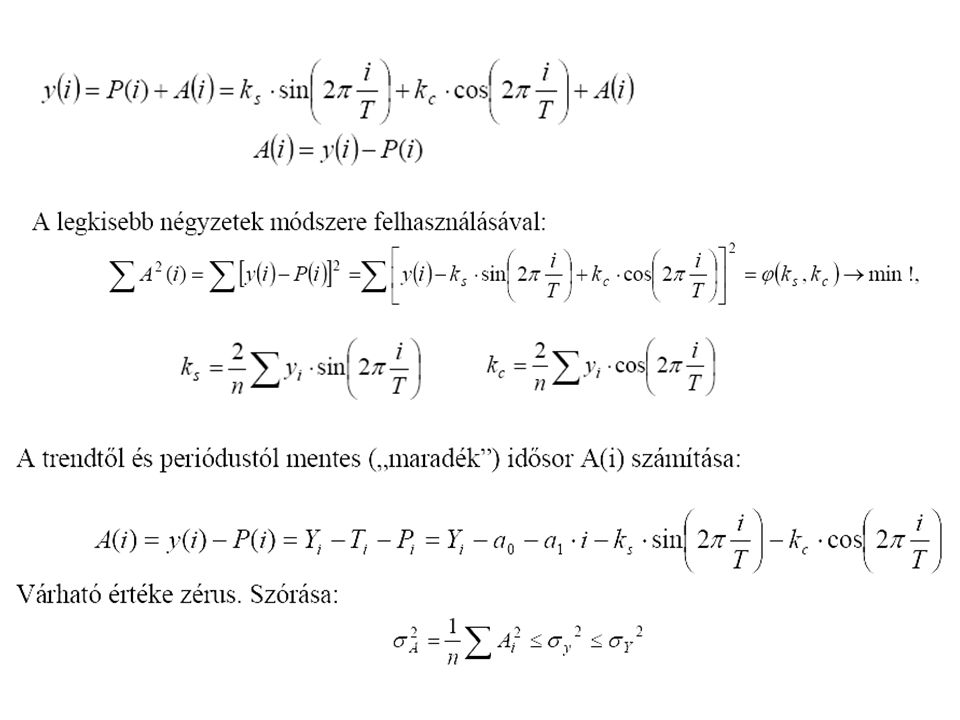
Periodikus komponens meghatározása

25
Sztochasztikus összetevők
Véletlen tag (zaj) Autoregresszív komponens
 Autoregresszív komponens.")
26
Egylépéses autokorrelációs tényező
Egylépéses AR modell: Kétlépéses AR modell:

27
AR, MA és ARMA modellek AR ( p ) : MA ( q ) : ARMA ( p, q ) :
Stacionárius folyamat (kritériumok: állandó átlag és szórás) leírására szolgálnak. Az idősor zt aktuális eleme az előző elemek (AR) illetve az a normális eloszlású véletlen sorozat előző tagjainak (MA) lineáris kombinációjaként számítható ki. AR ( p ) : MA ( q ) : ARMA ( p, q ) : Az AR(0) modellt fehér zaj modellnek is nevezik :
 leírására szolgálnak. Az idősor zt aktuális eleme az előző elemek (AR) illetve az a normális eloszlású véletlen sorozat előző tagjainak (MA) lineáris kombinációjaként számítható ki. AR ( p ) : MA ( q ) : ARMA ( p, q ) : Az AR(0) modellt fehér zaj modellnek is nevezik :")
28
Előrejelzés idősor modellekkel

29
Thomas-Fiering modell (Balaton természetes vízkészlet változásának előrejelzése)
")
Hasonló előadás







>")











