Szabályozási Rendszerek Automatizálási tanszék Szabályozási Rendszerek 2013/2014, őszi szemeszter Előadás
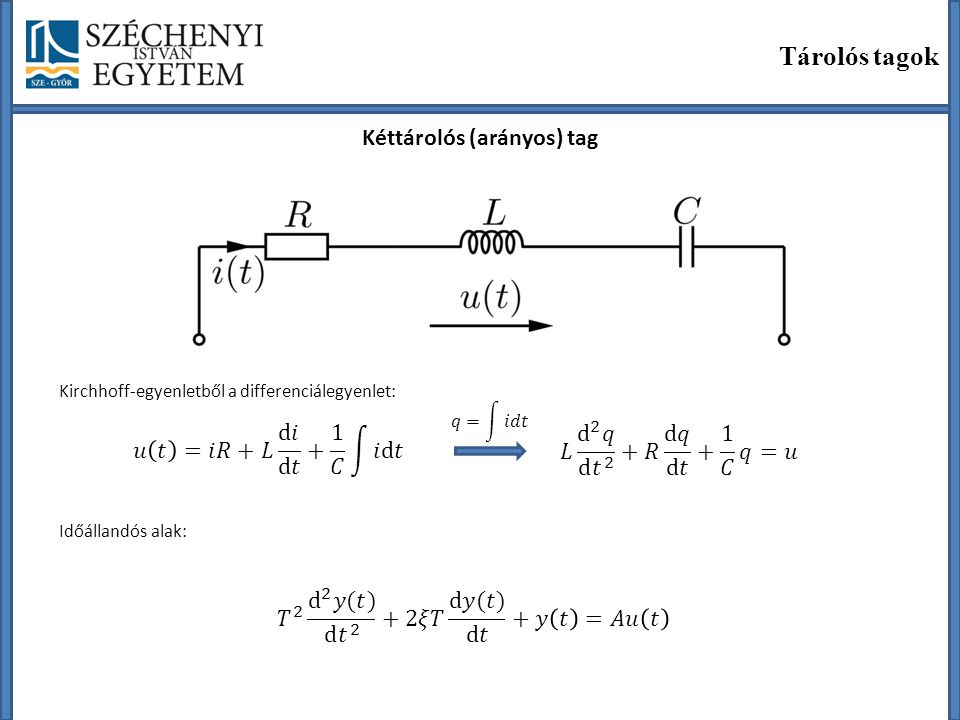
Kéttárolós (arányos) tag Tárolós tagok Kéttárolós (arányos) tag Kirchhoff-egyenletből a differenciálegyenlet: 𝑞= 𝑖𝑑𝑡 𝑢 𝑡 =𝑖𝑅+𝐿 d𝑖 d𝑡 + 1 𝐶 𝑖d𝑡 𝐿 d 2 𝑞 d 𝑡 2 +𝑅 d𝑞 d𝑡 + 1 𝐶 𝑞=𝑢 Időállandós alak: 𝑇 2 d 2 𝑦(𝑡) d 𝑡 2 +2𝜉𝑇 d𝑦(𝑡) d𝑡 +𝑦 𝑡 =𝐴𝑢 𝑡
Kéttárolós (arányos) tag Tárolós tagok Kéttárolós (arányos) tag 𝑇 2 d 2 𝑦(𝑡) d 𝑡 2 +2𝜉𝑇 d𝑦(𝑡) d𝑡 +𝑦 𝑡 =𝐴𝑢 𝑡 𝑇= 𝑎 2 𝑎 0 𝐴= 𝑏 0 𝑎 0 𝜉= 𝑎 1 2 𝑎 0 𝑎 2 𝑊 𝑠 = 𝐴 1+2𝜉𝑇𝑠+ 𝑇 2 𝑠 2 Átviteli függvénye: 𝑠 1,2 =− 𝜉 𝑇 ± 1 𝑇 𝜉 2 −1 A szakasz pólusai:
Kéttárolós (arányos) tag Tárolós tagok Kéttárolós (arányos) tag 𝑇 2 d 2 𝑦(𝑡) d 𝑡 2 +2𝜉𝑇 d𝑦(𝑡) d𝑡 +𝑦 𝑡 =𝐴𝑢 𝑡 𝑇= 𝑎 2 𝑎 0 𝐴= 𝑏 0 𝑎 0 𝜉= 𝑎 1 2 𝑎 0 𝑎 2 𝑊 𝑠 = 𝐴 1+2𝜉𝑇𝑠+ 𝑇 2 𝑠 2 Átviteli függvénye: 𝑠 1,2 =− 𝜉 𝑇 ± 1 𝑇 𝜉 2 −1 A szakasz pólusai: Három eset: - Aperiodikus eset, 𝜉<1, - Aperiodikus határeset, 𝜉=1, - Lengő eset, 𝜉>1
Kéttárolós (arányos) tag Tárolós tagok Kéttárolós (arányos) tag Aperiodikus eset, 𝝃<𝟏, 𝑊 𝑠 = 𝐴/ 𝑇 1 𝑇 2 (𝑠+1/ 𝑇 1 )(𝑠+1/ 𝑇 2 ) Átviteli függvénye: 𝑇 1 =− 1 𝑠 1 , é𝑠 𝑇 2 =− 1 𝑠 2 𝑣 𝑡 = ℒ −1 1 𝑠 𝑊(𝑠) =𝐴 1− 𝑇 1 𝑇 1 − 𝑇 2 𝑒 −𝑡/ 𝑇 1 + 𝑇 2 𝑇 1 − 𝑇 2 𝑒 −𝑡/ 𝑇 2 Átmeneti függvénye: 𝑤 𝑡 = ℒ −1 𝑊(𝑠) =𝐴 1 𝑇 1 − 𝑇 2 𝑒 −𝑡/ 𝑇 1 + 1 𝑇 1 − 𝑇 2 𝑒 −𝑡/ 𝑇 2 Súlyfüggvénye:
Kéttárolós (arányos) tag Tárolós tagok Kéttárolós (arányos) tag Aperiodikus határeset, 𝝃=𝟏, 𝑊 𝑠 = 𝐴 (1+𝑠𝑇) 2 = 𝐴/ 𝑇 2 (𝑠+1/𝑇) 2 Átviteli függvénye: 𝑣 𝑡 = ℒ −1 1 𝑠 𝑊(𝑠) = ℒ −1 1 𝑠 𝐴/ 𝑇 2 𝑠+1/ 𝑇 2 =𝐴 𝛼 𝑠 + 𝛽 𝑠+1/𝑇 + 𝛾 (𝑠+1/𝑇) 2 Átmeneti függvénye: 𝛼=𝐴, 𝛽=−𝐴, 𝛾=−𝐴/𝑇 𝑣 𝑡 =𝐴 1− 𝑒 −𝑡/𝑇 − 1 𝑇 𝑡 𝑒 −𝑡/𝑇 𝑤 𝑡 = 𝐴 𝑇 2 𝑡 𝑒 −𝑡/𝑇 , t≥0 Súlyfüggvénye:
Kéttárolós (arányos) tag Tárolós tagok Kéttárolós (arányos) tag Lengő eset, 𝝃<𝟏, 𝑊 𝑠 = 𝐴 1+2𝜉𝑇𝑠+ 𝑇 2 𝑠 2 = 𝐴/ 𝑇 2 𝑠− 𝑠 1 𝑠− 𝑠 2 Átviteli függvénye: 𝑠 1,2 =− 𝜉 𝑇 ±𝑗 1 𝑇 1− 𝜉 2 =−𝜉 𝜔 0 ±𝑗 𝜔 𝑝 , ahol 𝜔 0 =1/𝑇 és 𝜔 𝑝 = 1− 𝜉 2 /𝑇
Kéttárolós (arányos) tag Tárolós tagok Kéttárolós (arányos) tag Lengő eset, 𝝃<𝟏, 𝑤 𝑡 = 𝐴 𝜔 0 1− 𝜉 2 𝑒 −𝜉 𝜔 0 𝑡 sin 𝜔 𝑝 𝑡, 𝑡≥0 Súlyfüggvénye: v 𝑡 =𝐴 1− 𝑒 −𝜉 𝜔 0 𝑡 1− 𝜉 2 1− 𝜉 2 cos 𝜔 𝑝 𝑡+𝜉 sin 𝜔 𝑝 𝑡 , t≥0 Átmeneti függvénye:
Kéttárolós (arányos) tag Tárolós tagok Kéttárolós (arányos) tag 𝜎= 𝑣 max − 𝑣 áll 𝑣 áll 100%= 𝑒 −𝜉𝜋 1− 𝜉 2 100% Túllendülése, ha 𝜉<1: 𝑡 𝑐 = 𝜋 𝜔 𝑝 = 𝜋 𝜔 0 1− 𝜉 2 Első maximum helye: 𝑡 𝛼 = ln 100 Δ 𝜉𝜔 0 Beállási idő: Fázisgörbe meredeksége: − 132 ∘ /𝜉/dekád Fázisszöge: − 90 ∘
A stabilitás Stabilitás: a rendszernek az a tulajdonsága, hogy egyensúlyi állapotból kimozdítva újra egyensúlyba képes kerülni. Nemlineáris rendszer: - a stabilitás függ a bemenőjeltől és a munkaponttól is - a stabilitás a rendszer egy állapotának jellemzője Lineáris rendszer: - a stabilitás függ a rendszer struktúrájától és a paramétereitől. - független a bemenőjeltől - a stabilitás a rendszer jellemzője. A stabilitás meghatározásai: - a magára hagyott rendszer stabilitása - a gerjesztett rendszer stabilitása - belső stabilitás
Stabilitásvizsgálat Aszimptotikus stabilitás feltétele: a zárt rendszer pólusai negatív valós részűek legyenek, vagyis valamennyi pólusa a komplex számsík bal oldalára esik Ha van pólus a(z) - képzetes tengelyen, az origóban: - integráló hatás - nem cseng le a tranziens - képzetes tengelyen, egyszeres konjugált komplex pólus: - csillapítatlan lengések a tranziensben - többszörös konjugált komplex pólus: - növekvő amplitúdójú lengések Stabilitás eldöntése analitikus stabilitási kritériumok alapján: - Routh séma - Hurwitz determináns - gyökhelygörbe-módszer Labilis folyamat esetén: - Nyquist-féle stabilitási kritérium - Bode-féle stabilitási kritérium
Stabilitásvizsgálat Routh séma 𝑎 𝑛 𝑠 𝑛 + 𝑎 𝑛−1 𝑠 𝑠−1 +…+ 𝑎 1 𝑠+ 𝑎 0 = 𝑎 𝑛 𝑠− 𝑝 1 𝑠− 𝑝 2 … 𝑠− 𝑝 𝑛 =0 𝑎 𝑛 𝑎 𝑛−2 𝑎 𝑛−4 𝑎 𝑛−6 … 𝑎 𝑛−1 𝑎 𝑛−3 𝑎 𝑛−5 𝑎 𝑛−7 … 𝑏 𝑛−2 𝑏 𝑛−4 𝑏 𝑛−6 𝑏 𝑛−8 … 𝑐 𝑛−3 𝑐 𝑛−5 𝑐 𝑛−7 𝑐 𝑛−9 … ⋮ … 𝑏 𝑛−2 = 𝑎 𝑛−1 𝑎 𝑛−2 − 𝑎 𝑛 𝑎 𝑛−3 𝑎 𝑛−1 , 𝑏 𝑛−4 = 𝑎 𝑛−1 𝑎 𝑛−4 − 𝑎 𝑛 𝑎 𝑛−5 𝑎 𝑛−1 , 𝑏 𝑛−6 = 𝑎 𝑛−1 𝑎 𝑛−6 − 𝑎 𝑛 𝑎 𝑛−7 𝑎 𝑛−1 , … 𝑐 𝑛−3 = 𝑏 𝑛−2 𝑎 𝑛−3 − 𝑎 𝑛−1 𝑏 𝑛−4 𝑏 𝑛−2 , 𝑐 𝑛−5 = 𝑏 𝑛−2 𝑎 𝑛−5 − 𝑎 𝑛−1 𝑏 𝑛−6 𝑏 𝑛−2 , … A rendszer stabilis: - a karakterisztikus polinom együtthatói pozitívak - első oszlop valamennyi eleme is pozitív A rendszer labilis: - az első oszlop elemei közül nem mind pozitív - előjelváltások: zárt rendszer jobboldali pólusainak száma - 0 jelenik meg: a karakterisztikus egyenlet imaginárius tengelyre eső első - gyökére utal → ε
Stabilitásvizsgálat Hurwitz determináns 𝑎 𝑛 𝑠 𝑛 + 𝑎 𝑛−1 𝑠 𝑠−1 +…+ 𝑎 1 𝑠+ 𝑎 0 = 𝑎 𝑛 𝑠− 𝑝 1 𝑠− 𝑝 2 … 𝑠− 𝑝 𝑛 =0 𝑎 𝑛−1 𝑎 𝑛−3 𝑎 𝑛−5 𝑎 𝑛−7 … 𝑎 𝑛 𝑎 𝑛−2 𝑎 𝑛−4 𝑎 𝑛−6 … 0 𝑎 𝑛−1 𝑎 𝑛−3 𝑎 𝑛−5 … 0 𝑎 𝑛 𝑎 𝑛−2 𝑎 𝑛−4 … 0 0 𝑎 𝑛−1 𝑎 𝑛−3 … ⋮ Aldeterminánsok: △ 1 = 𝑎 𝑛−1 △ 2 = 𝑎 𝑛−1 𝑎 𝑛−3 𝑎 𝑛 𝑎 𝑛−2 △ 3 = 𝑎 𝑛−1 𝑎 𝑛−3 𝑎 𝑛−5 𝑎 𝑛 𝑎 𝑛−2 𝑎 𝑛−4 0 𝑎 𝑛−1 𝑎 𝑛−3 A rendszer stabilis: - a karakterisztikus egyenlet valamennyi együtthatója pozitív - a főátlóra támaszkodó valamennyi aldetermináns is pozitív - a negatív indexű elemeket 0-val vesszük figyelembe
Gyökhelygörbe módszer Stabilitásvizsgálat Gyökhelygörbe módszer A karakterisztikus egyenlet gyökeit adja meg a komplex számsíkon, miközben a rendszer valamelyik paramétere (leggyakrabban a körerősítés) nulla és végtelen között változik. - ha a gyökök a bal oldali félsíkra esnek, a rendszer stabilis - kritikus körerősítésnél a gyökhelygörbe metszi az Im tengelyt - ha, a gyökök a jobb oldali félsíkra esnek, a rendszer labilis A gyökhelygörbe előállítása: - karakterisztikus egyenlet megoldásával - grafikus úton próbálgatással - szerkesztési módszerek - számítógépes programok - tulajdonságok alapján közelítve
Nyquist stabilitási kritérium Stabilitási kritériumok Nyquist stabilitási kritérium Ha a felnyitott szabályozási kör stabilis, akkor a zárt szabályozási kör stabilitása megítélhető. Egyszerűsített Nyquist kritérium: - Ha a Nyquist diagram nem veszi körül a −𝟏+𝒋𝟎 pontot, a zárt szabályozási kör stabilis. - Ha a Nyquist diagram átmegy a −𝟏+𝒋𝟎 ponton, a rendszer a stabilitás határán van. - Ha a Nyquist diagram körülveszi a −𝟏+𝒋𝟎 pontot, a rendszer labilis.
Nyquist stabilitási kritérium Stabilitási kritériumok Nyquist stabilitási kritérium Ha a felnyitott szabályozási kör labilis, akkor a zárt szabályozási kör stabilitása eldönthető Általánosított Nyquist kritérium: Ha a felnyitott rendszer jobb oldali pólusainak száma P, akkor a zárt szabályozási rendszer akkor aszimptotikusan stabilis, ha a felnyitott rendszer teljes Nyquist diagramja, annyiszor veszi körül a komplex számsíkon a −𝟏+𝒋𝟎 pontot az óramutató járásával ellentétes, pozitív irányban, amennyi a felnyitott rendszer jobb oldali pólusainak a száma.
A stabilitás gyakorlatban használt mérőszámai Stabilitási kritériumok A stabilitás gyakorlatban használt mérőszámai A mérőszámok megadják, hogy milyen messze van a felnyitott rendszer Nyquist diagramja a −𝟏+𝒋𝟎 ponttól Fázistartalék/fázistöbblet: 𝜑 𝑡 =𝜑 𝜔 𝑐 +180° - ha 𝜑 𝑡 >0, stabilis rendszer - ha 𝜑 𝑡 =0, határhelyzet - ha 𝜑 𝑡 <0, labilis rendszer Csak egyszer metszheti a Nyquist diagram a negatív valós tengelyt!
A stabilitás gyakorlatban használt mérőszámai Stabilitási kritériumok A stabilitás gyakorlatban használt mérőszámai A mérőszámok megadják, hogy milyen messze van a felnyitott rendszer Nyquist diagramja a −𝟏+𝒋𝟎 ponttól Erősítési tartalék: 𝜅= 1+𝐿 𝑗 𝜔 180 Módosított erősítési tartalék: 𝜅 ′ =1−𝜅 - ha 𝜅 ′ <1, stabilis rendszer - ha 𝜅 ′ =1, határhelyzet - ha 𝜅 ′ >1, labilis rendszer Csak egyszer metszheti a Nyquist diagram a negatív valós tengelyt!
A stabilitás gyakorlatban használt mérőszámai Stabilitási kritériumok A stabilitás gyakorlatban használt mérőszámai A mérőszámok megadják, hogy milyen messze van a felnyitott rendszer Nyquist diagramja a −𝟏+𝒋𝟎 ponttól Modulus tartalék: 𝜌 𝑚 = 1 max 𝜔 𝑆(𝑗𝜔) = min 𝜔 𝑆 −1 𝑗𝜔 = min 𝜔 1+𝐿 𝑗𝜔 Azt mutatja, hogy milyen messze van a rendszer legkevésbé stabilis pontja a stabilitás határától. Általában 𝜌 𝑚 >0,5 Késleltetési tartalék: 𝑇 𝑚 = 𝜑 𝑡 𝜔 𝑐 A holtidő azon legkisebb értéke, amelyet a felnyitott körbe sorosan iktatva a zárt rendszer a stabilitás határára kerül.
BODE stabilitási kritérium Stabilitási kritériumok BODE stabilitási kritérium Ha a felnyitott szabályozási kör stabilis, akkor a zárt szabályozási kör stabilitása megítélhető. -20dB/dekád esetén a rendszer stabilis -60dB/dekád esetén a rendszer labilis -40dB/dekád esetén vagy labilis, vagy stabilis, de a fázistartalék, biztos, hogy kicsi!