Előadást letölteni
1
Autonóm jellegű robot rover fedélzeti rendszere Góczán Bence Dávid Konzulens: dr Kiss Bálint Eszközök : Simonyi Károly Szakkollégium - LEGO Kör

2
Bevezetés Robot platformok “Harold” fedélzeti rendszer Tesztelés Távlati célok

3
Robot platformok Hol használjuk őket? Ahol az emberi munkavégzés kényelmetlen veszélyes lehetetlen Mobilitás nem mobilis mobilis Guruló lábakon járó Vezérlés módja távvezérlés autonóm

4
“Harold” fedélzeti rendszer Célok: Mobilis robot platform irányítása ismeretlen területen Könny ű b ő vítés Univerzális felhasználhatóság

5
“Harold” fedélzeti rendszer Feladat: A rover önállóan mozogjon és navigáljon ismeretlen területen. Emberi beavatkozásra csak késleltetve van lehet ő ség a kezel ő személyzet csak koordinátákat ad meg, a rover önállóan és interaktívan tervezze az útvonalát Önállóan végezzen mérési munkát, kezelje a “payload”-okat

6
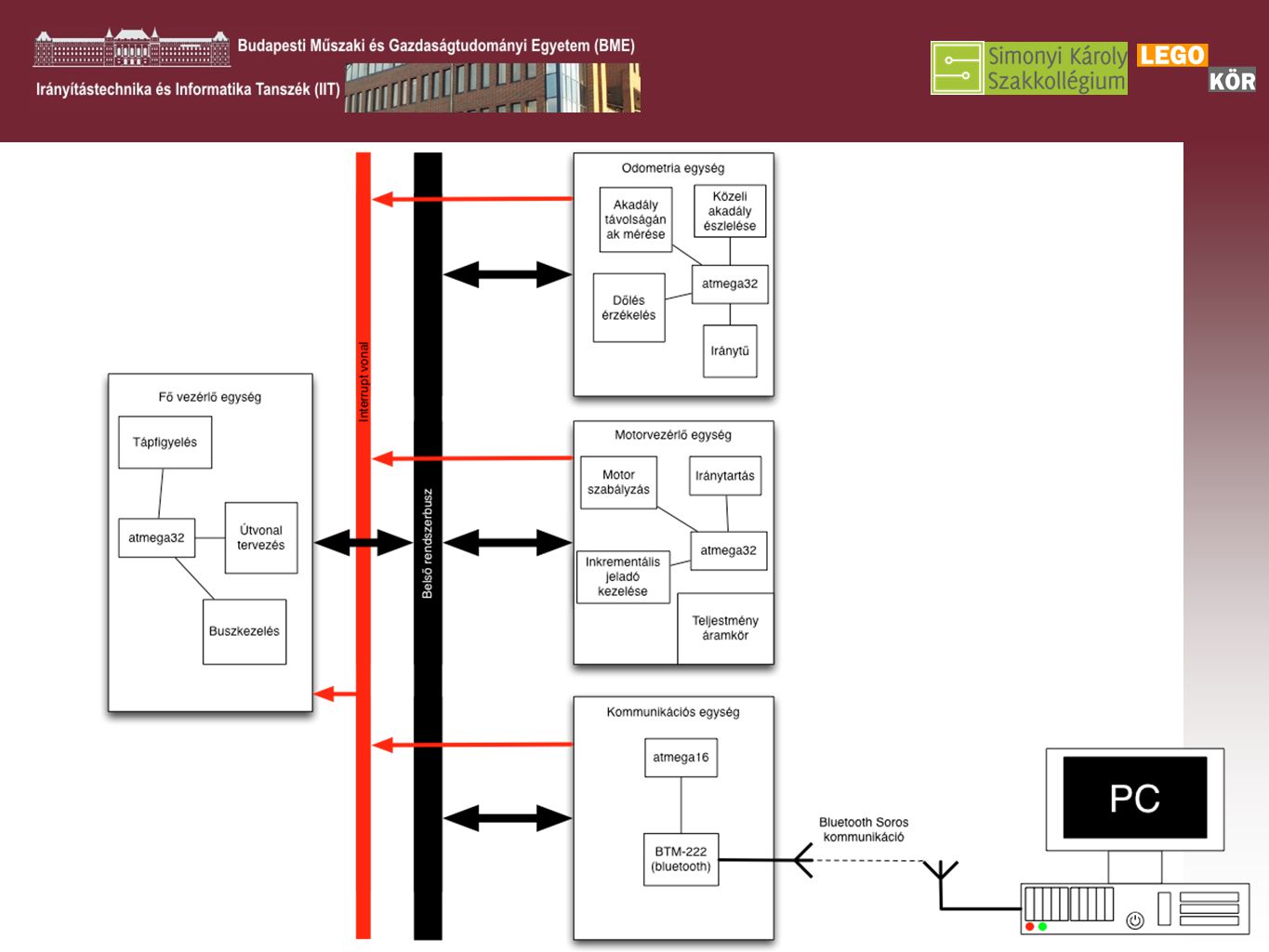
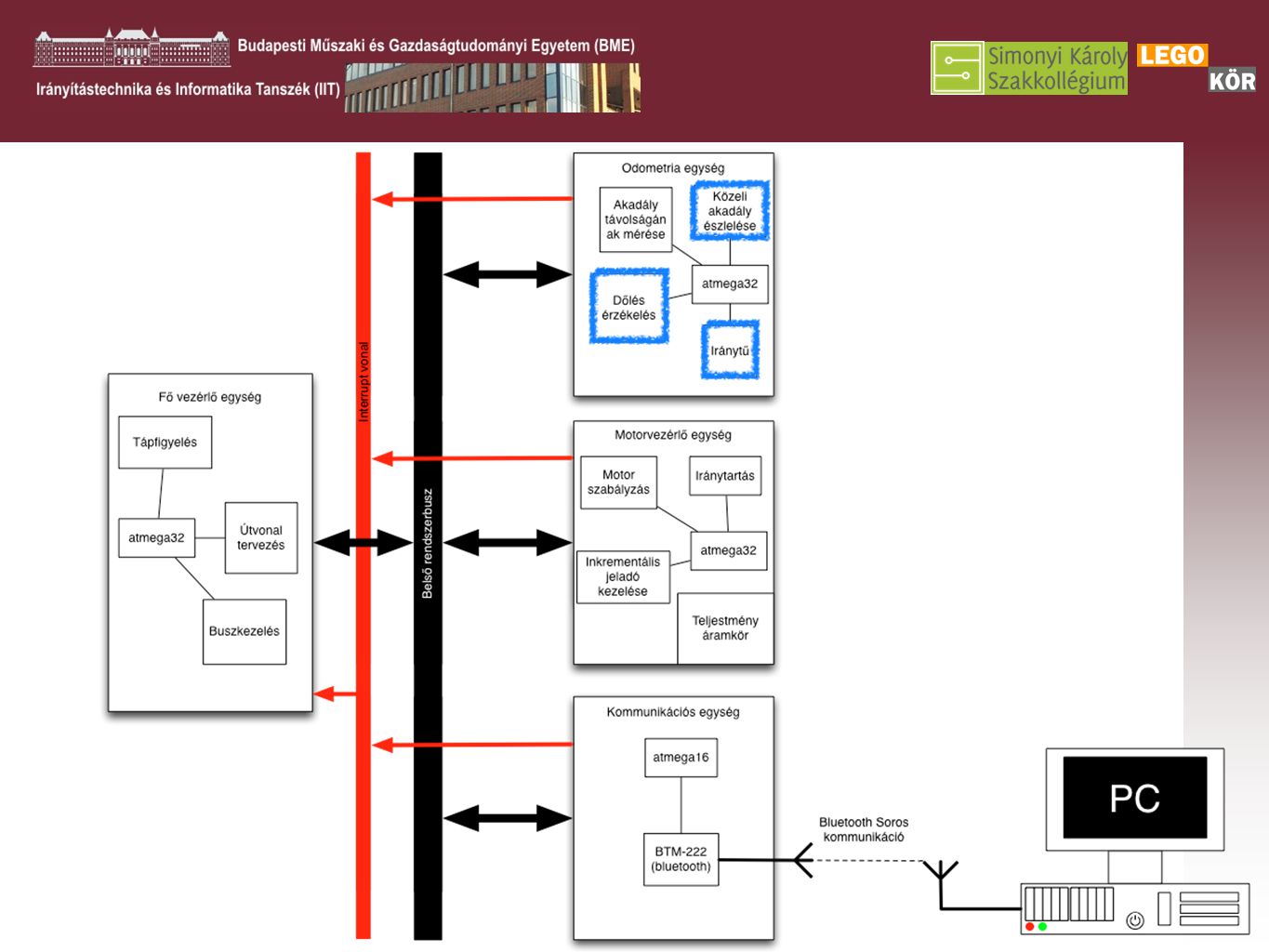
“Harold” fedélzeti rendszer Felépítése: Kártyás felépítés Alapkártyák: Alaplap, Odometria, Motorvezérlés, Kommunikáció A kártyák és a “payload”-ok egy párhuzamos buszrendszeren kapcsolódnak

10
ARM

11
DSP

12
Másik rover

13
GSM modul GSM kommunikáció GSM egysEg 123 456 789

14
“Harold” fedélzeti rendszer Működés: A területre egy négyzethálót fektetünk, ez adja a koordinátarendszerünket, a rover a négyzetrácsokon lépked A rover a koordinátákat a “landolási pont”-hoz viszonyítja A kapott koordináták alapján kiszámolja az irányt és a távolságot. 0-ad rend ű útvonalat készít(egyenes) Megvizsgálja, hogy az útjába es ő négyzetrácsokban van-e akadály Amennyiben a 0-ad rendű útvonalba akadály esik, megvizsgálja, hogy a kitérés melyik irányba kisebb költség ű, és ez alapján korrigálja az útvonalat
 Megvizsgálja, hogy az útjába es ő négyzetrácsokban van-e akadály Amennyiben a 0-ad rendű útvonalba akadály esik, megvizsgálja, hogy a kitérés melyik irányba kisebb költség ű, és ez alapján korrigálja az útvonalat.")
15
(0,0) (4,4)(3,3)
 (4,4)(3,3)")
16
(0,0) (4,4) r (3,3)
 (4,4) r (3,3)")
17
(0,0) (4,4)(3,3)
 (4,4)(3,3)")
18
(0,0) (4,4)(3,3)
 (4,4)(3,3)")
19
(0,0) (4,4)(3,3)
 (4,4)(3,3)")
20
(0,0) (4,4)(3,3)
 (4,4)(3,3)")
21
(0,1) (4,4) r (3,3)
 (4,4) r (3,3)")
22
(0,1) (4,4)(3,3)
 (4,4)(3,3)")
23
(0,1) (4,4)(3,3)
 (4,4)(3,3)")
24
(0,1) (4,4)(3,3)
 (4,4)(3,3)")
25
(0,1) (4,4)(3,3)
 (4,4)(3,3)")
26
(0,2) (4,4) r (3,3)
 (4,4) r (3,3)")
27
(0,2) (4,4)(3,3)
 (4,4)(3,3)")
28
(1,2) (4,4) r (3,3)
 (4,4) r (3,3)")
29
(1,2) (4,4)(3,3)
 (4,4)(3,3)")
30
(1,2) (4,4)(3,3)
 (4,4)(3,3)")
31
(2,2) (3,3) r
 (3,3) r")
32
(4,4) (2,2) (3,3)
 (2,2) (3,3)")
33
(4,4) (2,2) (3,3)
 (2,2) (3,3)")
34
(4,4) (2,2) (3,3)
 (2,2) (3,3)")
35
(4,4) (2,2) (3,3)
 (2,2) (3,3)")
36
(4,4)(3,3)
(3,3)")
37
(4,4)(3,3)
(3,3)")
38
Tesztelés A tesztrover Differnciális meghajtású rover Vázszerkezet : LEGO®Technic™ alkatrészekb ő l Meghajtás : LEGO®Mindstorms™NXT™ servo motorok Érzékelés : Motorokba épített inkrementális jeladó SHARP GP 2D 12 infrás optikai távolságmér ő

39
Tesztelés A tesztpálya 4x4 négyzetből álló háló egy négyzet 30x30 cm-es különboz ő méret ű akadályok fehér habszivacsból a rácsok határát fekete vonal jelzi, ez csak a tesztelés során a megfigyeléshez szükséges

40
Tesztelés Eredmények

41
Távlati célok Nagyobb számítási képesség ű f ő vezérl ő egység Különböz ő kommunikációs platformok tesztelése Más roverekkel való kooperáció Nagyobb volumen ű, összetetteb rover irányítása az egységgel

42
Köszönöm a figyelmet!