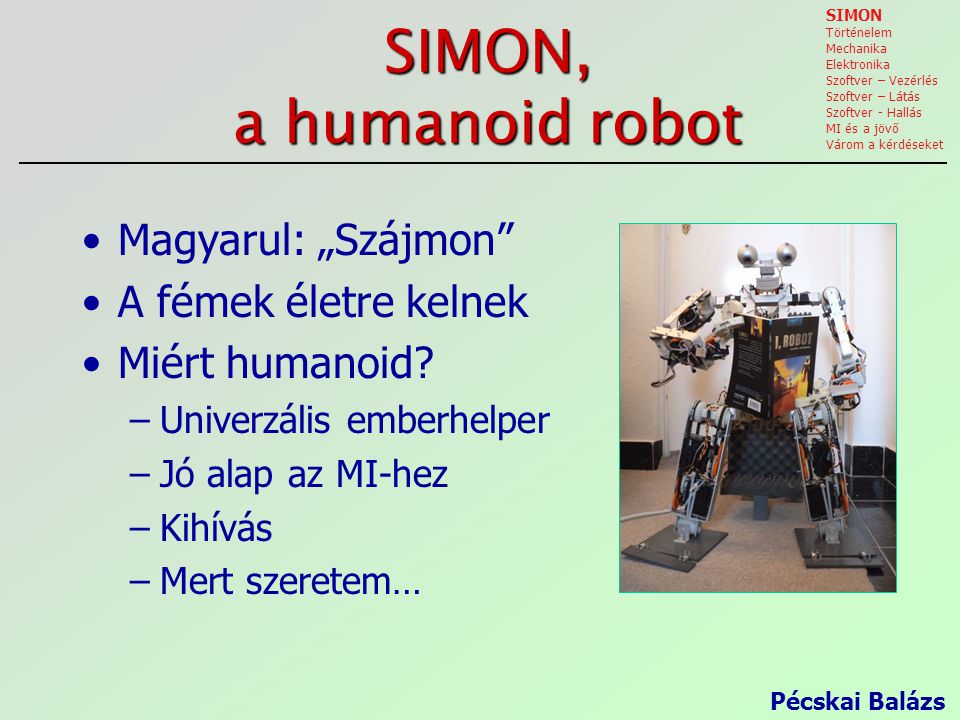
SIMON, a humanoid robot Magyarul: „Szájmon” A fémek életre kelnek Történelem Mechanika Elektronika Szoftver – Vezérlés Szoftver – Látás Szoftver - Hallás MI és a jövő Várom a kérdéseket SIMON, a humanoid robot Magyarul: „Szájmon” A fémek életre kelnek Miért humanoid? Univerzális emberhelper Jó alap az MI-hez Kihívás Mert szeretem… Pécskai Balázs
Történelem 2003 Simon v1 2005 Simon v2 2006 Simon v3 Mechanika Elektronika Szoftver – Vezérlés Szoftver – Látás Szoftver - Hallás MI és a jövő Várom a kérdéseket Történelem 2003 Simon v1 150 cm , ablaktörlő motorok, variomata New Tech & No chance 2005 Simon v2 Jó ötlet & „Olcsó húsnak híg a leve” 2006 Simon v3 Now… lehet belőle valami…
Mechanika Differenciálmű alapú hajtás Recept: SIMON Történelem Mechanika Elektronika Szoftver – Vezérlés Szoftver – Látás Szoftver - Hallás MI és a jövő Várom a kérdéseket Mechanika Differenciálmű alapú hajtás Recept: + Alumínium + Poliuretán + PVC + na meg 500 csavar Modell servo, hacking by me Végtelenítés, új visszacsatolás
Elektronika 6 párhuzamosan kötött vezérlő egység SIMON Történelem Mechanika Elektronika Szoftver – Vezérlés Szoftver – Látás Szoftver - Hallás MI és a jövő Várom a kérdéseket Elektronika 6 párhuzamosan kötött vezérlő egység PWM alapú szervo-vezérlés PIC-ek, RS232 Dőlésérzékelő Giroszkóp, ADC-k, Nyomásérzékelők
Szoftver – Vezérlés1. Windows - Delphi Komplex vezérlési lehetőségek SIMON Történelem Mechanika Elektronika Szoftver – Vezérlés Szoftver – Látás Szoftver - Hallás MI és a jövő Várom a kérdéseket Szoftver – Vezérlés1. Windows - Delphi Komplex vezérlési lehetőségek Szervok pozícióra Izületek mozgatása Izületek pozíciói az idő függvényében Inverz kinematika Koreográfiák Billentyűzeten mozgáskombinációk
Szoftver – Vezérlés 2. Mozgások tesztelése: SIMON Történelem Mechanika Elektronika Szoftver – Vezérlés Szoftver – Látás Szoftver - Hallás MI és a jövő Várom a kérdéseket Szoftver – Vezérlés 2. Mozgások tesztelése: 3D, izületek pozíciói Egy másik 3D-s tér valóság szimulálása (gravitáció, dinamika, kölcsönhatások stb.) Intelligens mozgástervezés még gyerekcipőben (GA)
Szoftver - Látás 2 webkamera Képfeldolgozás Sztereo-optika SIMON Történelem Mechanika Elektronika Szoftver – Vezérlés Szoftver – Látás Szoftver - Hallás MI és a jövő Várom a kérdéseket Szoftver - Látás 2 webkamera Képfeldolgozás Optimalizáció Szűrők Sztereo-optika 3D-s tér generálása (kezdetleges) Későbbiekben Alakzat, illetve objektum-felismerés
Szoftver - Hallás Spektrum-analizáció Neurális hálózat SIMON Történelem Mechanika Elektronika Szoftver – Vezérlés Szoftver – Látás Szoftver - Hallás MI és a jövő Várom a kérdéseket Szoftver - Hallás Spektrum-analizáció Neurális hálózat Mondd még egyszer! Hmm… tán működik
Jelenlegi állapot Mechanika: SIMON Történelem Mechanika Elektronika Szoftver – Vezérlés Szoftver – Látás Szoftver - Hallás Jelen és jövő Várom a kérdéseket Jelenlegi állapot Mechanika: - mozog , de nem tud járni (gyenge szervók) Vezérlés - robot irányítására alkalmas, de nem autonóm - ciki a köldökzsinór Hallás - kevés beszédszegmens használata Látás - alap képfeldolgozás sztereóoptikával fűszerezve Beszéd - még nem önálló
MI és a jövő NEBULO 1 GA-val segített egyensúly és dinamikus járás SIMON Történelem Mechanika Elektronika Szoftver – Vezérlés Szoftver – Látás Szoftver - Hallás MI és a jövő Várom a kérdéseket MI és a jövő 1 GA-val segített egyensúly és dinamikus járás Hangfelismerés Szófelismerés Értelmezés . -1 Gondolkodás Érzelem Égből pottyant erősebb szervók Laptop & Akku a pocakba Sármos megjelenés (nemcsak nekem) NEBULO
SIMON Történelem Mechanika Elektronika Szoftver – Vezérlés Szoftver – Látás Szoftver - Hallás MI és a jövő Várom a kérdéseket Várom a kérdéseket Web: www.logintsys.hu Mail: pecskai.balazs@logintsys.hu Készítette: Pécskai Balázs LogIntSys Bt.
