BS_2 mikroszámítógép Felépítése Egyszerű áramkör Villogó LED Közlekedési lámpa LED kigyújtása alacsony /magas szinttel For…NEXT Változók deklarálása DEBUG Óra- perc-másodperc SOUND Kapcsoló Potenciometer Hétszegmenses kijelző Fényerősség mérése és kijelzése Önálló feladat READ/ WRITE LCD kijelző vezérlése
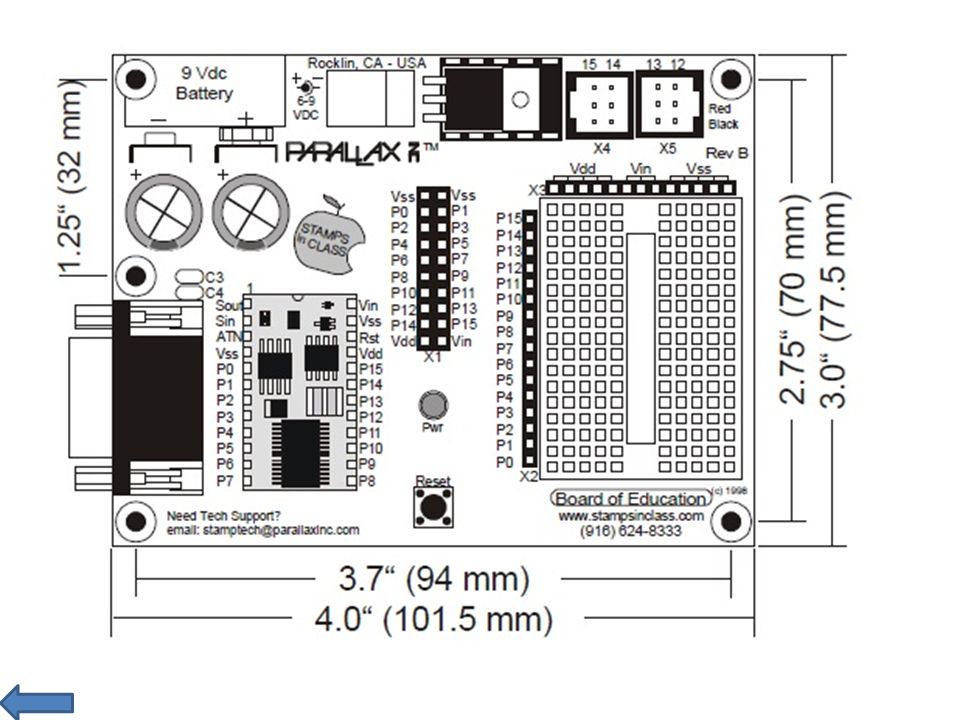
A proto felület
Egyszerű áramkör
Csatlakoztassunk ellenállást a 9V-os generátorhoz
Csatlakoztassuk a LED-et!
Zárjuk az áramkört!
Csatlakoztassuk az ellenállást az egyik porthoz! Például a 14-re.
Írjuk meg az editorban a következő programot!
Válasszuk ki az eszközt – BS2 –t, amin futtatni akarjuk a programunkat!
LED bekapcsolása
Rendőr
For_next ciklus
VAR utasítás - változók deklarálása
DEBUG
Óra, perc, másodperc
SOUND
Számlálás 1-10-ig
Reverzibilis számlánc
Bemenet figyelése A kapcsoló lábkiosztása
Kapcsoló állapotának figyelése 1kohm
BUTTON
RC -kör töltése- kisütése
Fényerősség mérése fotoellenállással
Fénykapcsoló
Hétszegmenses kijelző Jelenítse meg a számokat 0-tól 9-ig!
Hétszegmenses kijelző Jelenítse meg a számokat 0-tól 9-ig!
LOOKUP / LOOKDOWN
Fényerősség mérése és kijelzése Készítsen áramkört, amely alkalmas a fényerősség mérésére! A fényerősség változását foto-ellenállással érzékelje! Írjon programot, amely BS_2 mikroszámítógépen futtatva az ellenállás változáshoz számértéket rendel! A fényerősség változását jelenítse meg a hétszegmenses kijelzőn!
Önálló feladat Elemezze a következő programot! Hogyan működik? Írjon a programhoz részletes kommenteket!
Az önálló feladathoz tartozó áramkör
Önálló feladat
EEPROM írása/ olvasása
Figyelje meg, hogy a beírt adatok és a visszaolvasott adatok nem egyeznek meg! Az eltérés oka az, hogy byte-os szervezésű a memória. Pl.: 1250-et írtam be, majd a kiolvasásnál 226-ot és 4-et olvastam ki.
LCD illesztése a BS-2 höz P15 VDD Vss DATA BS_2 LCD vezérlő
LCD kijelző vezérlése
SEROUT
Ultrahangos távolságmérő Műk ö d é s: A szenzor Trigger l á b á n egy 10us-os High (5V) jelet kell adni a m é r é s megkezd é s é hez. A modul automatikusan kik ü ld nyolc 40 kHz-es n é gysz ö g alak ú impulzust é s automatikusan felismeri a visszaverőd ö tt jelet. Az echo l á b á t HIGH-ba billenti, é s addig marad HIGH-ban am í g é rz é keli a hang visszaverőd é s é t. Amint veszi a visszaverőd ö tt jelet, LOW-ba ker ü l. Ezt az időtartamot kell megm é rni (HIGH_LEVEL_time) a t á vols á g meghat á roz á s á hoz. Ez alapj á n a hang terjed é si sebess é g é nek (~340 m/s) ismeret é ben kisz á molhat ó azon objektum pontos t á vols á ga, melyről a visszaverőd é s t ö rt é nt. (Fontos: a m é r é s eredm é nye a m é rendő t á vols á g k é tszeres é nek megt é tel é hez sz ü ks é ges idő lesz, mert az ultrahang a modul ad ó j á t ó l eljut a t á rgyig, majd onnan visszaverődve t é r vissza a modul vevő szenzor á ig)
Ultrahangos távolságmérő Tulajdons á gok: T á pfesz ü lts é g: 5V Á ram felv é tel: <2mA É rz é kel é si sz ö g: 15fok É rz é kel é si t á vols á g: 2cm-450cm Pontoss á g: 0.3 cm Kimeneti jel: TTL PWL jel (5V->0V) Csatlakoz ó k: VCC Trig (T) Echo (R) GND Bemeneti trigger jel: 10usec TTL
A távolságmérő tesztelése Állítsuk össze a kapcsolást, a rajz szerint! Futtassuk a ping_test.bs2 programot! a Debug Terminálon a time = 450 körüli értéket jelez 438-tól 467-ig, ha a távolság 15 cm és 16 cm között van szorozzuk meg a mért tel, hogy centiméterben kapjuk a mérendő távolságot! PBASIC–ben a ** operátor végzi ezt a műveletet 0,03434 × = Felfelé kerekítve, gyel kell megszoroznunk a time változó értékét BS_2 HC - SRO4 + 5V GND TRIG ECHO P0 P2
Ultrahangos távolságmérő