Előadást letölteni
Az előadás letöltése folymat van. Kérjük, várjon

1
MECHANIZMUSOK SZÁMÍTÓGÉPES MODELLEZÉSE
Dr. Kátai László, egyetemi docens Bognár József, egyetemi adjunktus Szent István Egyetem, Gépészmérnöki Kar Géptani Intézet

2
Bevezetés Mérnökinformatikai eszközök térhódítása
Termék fejlesztési és gyártási költségek – tervezés korai fázisa Modellalkotás Analízis Kinematikai vizsgálat Virtuális tesztelés (szimuláció)
")
3
Előadás tematika Alapfogalmak Kinematikai vázlat
Szimuláció folyamatábra Kinematikai párok (kényszerek) Esettanulmány
 Esettanulmány.")
4
Alapfogalmak Mechanizmus
Mesterségesen kialakított testek rendszere, amely egy vagy több testnek egy másik test (testek) által előírt mozgását biztosítja. Mechanizmus Állvány Tag Kinematikai pár
 által előírt mozgását biztosítja. Mechanizmus. Állvány. Tag. Kinematikai pár.")
5
Alapfogalmak Szabadságfok Kötöttség
Térbeli mechanizmus esetén 6-ra, síkbeli mechanizmus esetén 3-ra egészítik ki egymást. Szabadságfok 1 Szabadságfok 2 Azon bemenő paraméterek száma, amelyeket szabályozni kell ahhoz, hogy a mechanizmust adott pozícióba hozzuk. n – tagok száma p5 – egy szabadságfokú (5 kötöttségű) kinematikai párok száma p4 – két szabadságfokú (4 kötöttségű) kinematikai párok száma
 kinematikai párok száma. p4 – két szabadságfokú (4 kötöttségű) kinematikai párok száma.")
6
Kinematikai vázlat Megadja a szerkezeti felépítést
Egyértelműen meghatározhatók a mozgástani tulajdonságok Meghatározható jellemzők: elmozdulás (pályagörbe) sebesség gyorsulás erő
 sebesség. gyorsulás. erő.")
7
Szimuláció folyamatábrája
futtatás Modell- alkotás Eredmények (megjelenítés) Kényszerek Szabályozás Analízis (szenzorok) Kép videó CATIA 3D modell
 Kényszerek. Szabályozás. Analízis. (szenzorok) Kép. videó. CATIA 3D modell.")
8
Kinematikai párok Előre definiált kényszerek Csukló (elfordulás)
Egyenesbe vezető (egyenes vonalú mozgás) Merev kapcsolat (nincs elmozdulás) Hengeres kapcsolat (elfordulás + egyenes vonalú mozgás) Csavar kapcsolat Fogaskerék kapcsolat
 Merev kapcsolat (nincs elmozdulás) Hengeres kapcsolat (elfordulás + egyenes vonalú mozgás) Csavar kapcsolat. Fogaskerék kapcsolat.")
9
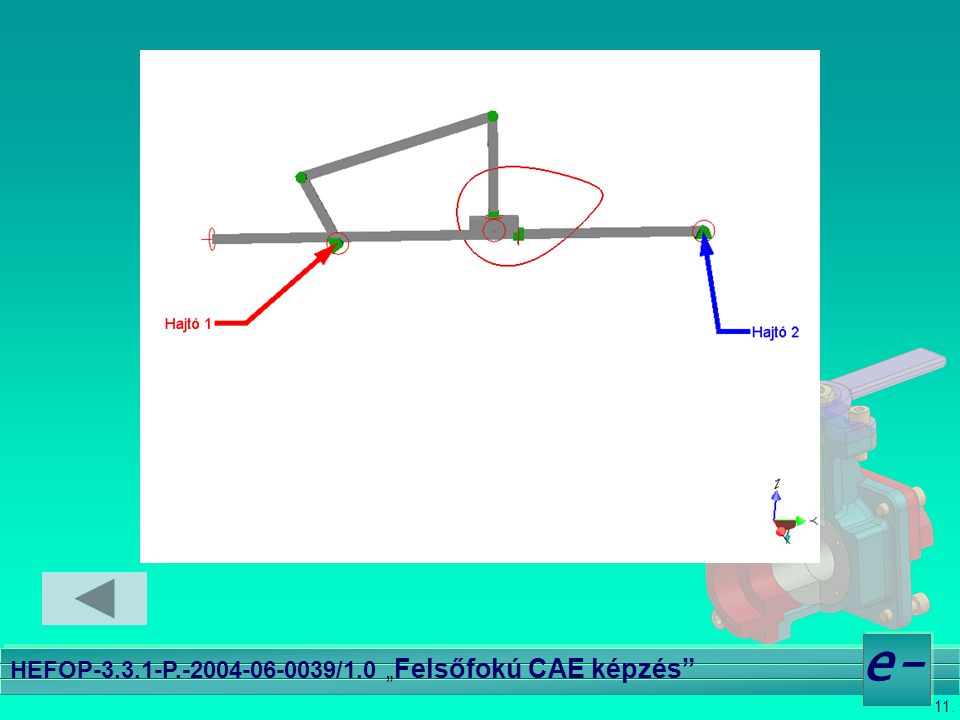
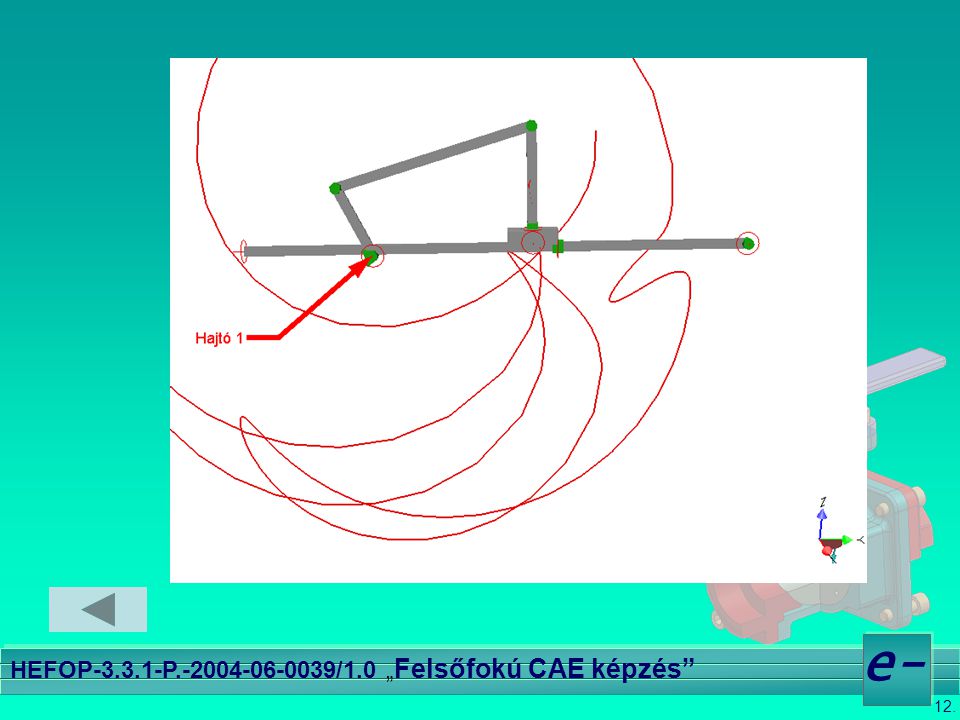
Esettanulmány felépítése
Feladat: Ablaktörlő mechanizmus modellezése Kinematikai vázlat Modellalkotás Kinematikai párok (kényszerek) definiálása Szimuláció (mozgatás paraméterének definiálása) Analízis (szenzorok) - mozgáspálya - sebesség - gyorsulás
 definiálása. Szimuláció (mozgatás paraméterének definiálása) Analízis (szenzorok) - mozgáspálya. - sebesség. - gyorsulás.")
10
A program megvalósul: A Foglalkoztatáspolitikai és Munkaügyi Minisztérium Humánerőforrás-fejlesztési Operatív Program „A felsőoktatás szerkezeti és tartalmi fejlesztése” program keretében

Hasonló előadás