Előadást letölteni
Az előadás letöltése folymat van. Kérjük, várjon

1
Dr. Lévai Zoltán Professor Emeritus
Járműdinamika alapjai

2
A járműre ható erők egyensúlya:
M a motor nyomatéka k nyomaték-módosítás az erőátvitelben r – a kerék sugara h - az erőátvitel hatásfoka G – a jármű súlya y útellenállás-tényező, ami y = f.cos a + sin a , ahol f gördülési ellenállás tényezője a útemelkedés szöge W légellenállástényező ahol cw – formatényező – a levegő sűrűsége A – homlokfelület nagysága v – a jármű sebessége m a jármű tömege d tehetetlenségi tényező

3
Mi a tehetetlenségi tényező?
ahol Ik a kerekek másodrendű nyomatéka ahol Im a motor másodrendű nyomatéka

4
Valamint az idő és az út diagramja a sebesség függvényében:
Új fogalom: dinamikai tényező (D) Ebből a gyorsulás: Valamint az idő és az út diagramja a sebesség függvényében:
 Ebből a gyorsulás: Valamint az idő és az út diagramja a sebesség függvényében:")
5
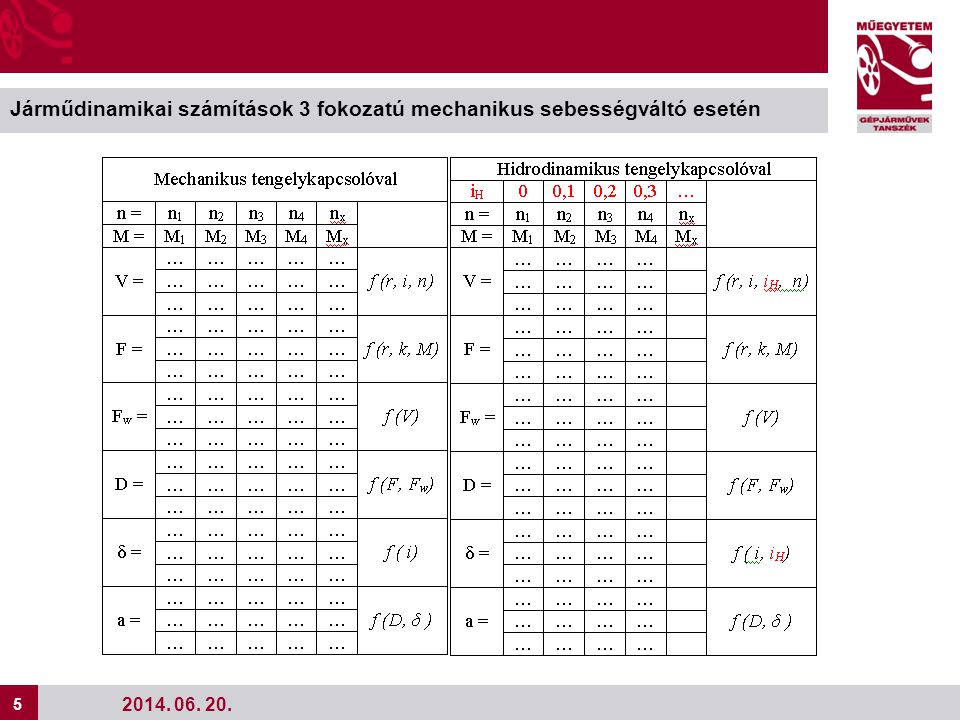
Járműdinamikai számítások 3 fokozatú mechanikus sebességváltó esetén
6
D – a tengelykapcsoló átmérője n – a szivattyúkerék fordulatszáma
A hidrodinamikus tengelykapcsoló nyomatékfelvétele: ahol l – mérésekkel megállapított arányossági tényező r - a folyadék sűrűsége Mechanikus hidraulikus tengelykapcsoló: D – a tengelykapcsoló átmérője n – a szivattyúkerék fordulatszáma Az összetartozó M, n és i H meghatározása:

7
Hidrodinamikus nyomatékváltó
Karakterisztikája: Az összetartozó M, n és i H meghatározása hasonló a tengelykapcsolóéval („seprűdiagram”) azzal a különbséggel, hogy a kH nyomatékmódosítást is figyelembe kell venni.
 azzal a különbséggel, hogy a kH nyomatékmódosítást is figyelembe kell venni.")
8
A vonóerő-diagram Mechanikus fokozat Hidraulikus fokozat

Hasonló előadás



















