Előadást letölteni
2
Az ízületek biomechanikája Oktató: dr. Tihanyi József egyetemi tanár

3
AZ ÍZÜLET FELÉPÍTÉSE MOZGÁSOK AZ ÍZÜLETBEN MOZGÁSTERJEDELEM AZ ÍZÜLET MECHANIKÁJA Témakörök

4
Az emberi test kinematikai lánc, amelyben a tagokat testrésznek (csontnak), a csuklókat ízületeknek nevezzük
, a csuklókat ízületeknek nevezzük")
5
Mit nevezünk ízületnek? Minimálisan két csont összekapcsolódása inak, szalagok, rostos szövet, porcszövet és izmok által Az ízesülő csontok ízfelszínét hyalin (üvegporc) borítja annak érdekében, hogy a nagy igénybevételt elviseljék és a súrlódási erőt csökkentsék a mozgások során.
 borítja annak érdekében, hogy a nagy igénybevételt elviseljék és a súrlódási erőt csökkentsék a mozgások során..")
7
148 Mozgatható csont 148 Mozgatható csont 147 ízület

8
Alsó végtagi ízületek: Csípő Térd Boka Láb Felső végtagi ízületek: Váll, vállízületi komplex Könyök Csukló Kéz A törzs ízületei: Gerincoszlop, csigolyák Medence Fej

9
Az ízületek típusai Lapos Henger Gömb Nyereg Forgó Elipszoid, tojás

10
Hengerízület Könyök ízület Térd ízület

11
Gömbízület Csípőízület Vállízület

12
kéztőcsontok és a nagyujj kézközépcsontja között Nyereg ízület

13
Tojásízület csukló ízület

14
Forgóízület

15
Lapos ízület

16
Az ízületek típusai egy tengelyű (henger) Két tengelyű (elliptikus, tojás) Három tengelyű ( gömb)
 Két tengelyű (elliptikus, tojás) Három tengelyű ( gömb)")
17
TípusLeírásFunkcióTerjedelemPéldák Rostos Porcos Szinoviális rostos szövetekkel kapcsolt Stabil kicsi vagy semmi Fibula- tibia Porcos összeköttetés Hajláskicsi Sternocost alis Szalagokkal kapcsolt Forgó és transzlációs mozgás nagy rotáció, kis transzlációTérd, csípő

18
Az emberi test síkjai Transzverzális v. vízszintes Szagittális v. oldal Szagittális v. oldal Koronális v. frontális

19
Tengelyek Longitudinális – Szagittális és frontális Anteroposterior – Szagitális és transzverzális Lateromediális – Frontális és transzverzális

20
Kardinális síkok Helyi referencia rendszer

21
Szélességi tengely (térdfeszítés – hajlítás )
")
22
Mélységi tengely (oldalra hajlítás, közelítés- távolítás )
")
23
Hosszúsági tengely (törzsforgatás, everzió- inverzió )
")
24
Kiegészítő (belső) 180° Ízületi szög Anatómiai (külső) 0° Kiegészítő (belső) 100° Anatómiai (külső) 80°
 180° Ízületi szög Anatómiai (külső) 0° Kiegészítő (belső) 100° Anatómiai (külső) 80°")
25
ÍZÜLETI SZÖGELFORDULÁS

26
MOZGÁSTERJEDELEM (ROM) A mozgásterjedelem azt a legnagyobb ízületi szögelfordulást jelenti egy ízületi tengely körül, amely anatómiailag még lehetséges A mozgásterjedelem azt a legnagyobb ízületi szögelfordulást jelenti egy ízületi tengely körül, amely anatómiailag még lehetséges
 A mozgásterjedelem azt a legnagyobb ízületi szögelfordulást jelenti egy ízületi tengely körül, amely anatómiailag még lehetséges A mozgásterjedelem azt a legnagyobb ízületi szögelfordulást jelenti egy ízületi tengely körül, amely anatómiailag még lehetséges")
27
Aktív mozgásterjedelem Passzív mozgásterjedelem Passzív mozgásterjedelem > aktív mozgásterjedelem

28
A mozgásterjedelmet befolyásoló tényezők 1. Az ízületek típusa 2. Az ízületi szalagok mechanikai tulajdonságai nyúlékonyság merevség 3. Az izmok és inak anatómiai és biomechanikai jellemzői Izom és ínhosszúság illetve a kettő aránya Izom architektúra Izomkeresztmetszet

29
SZABADSÁGFOK ( DOF) DOF = a koordináták száma minusz a megkötöttségek száma DOF a változóknak az a száma, amely a test mozgásának leírásához szükségesen elegendő rotáció transzláció 3 3 + 6
 DOF = a koordináták száma minusz a megkötöttségek száma DOF a változóknak az a száma, amely a test mozgásának leírásához szükségesen elegendő rotáció transzláció")
30
Két dimenzió (2D): DOF = 3N - C Három dimenzió (3D): DOF = 6N - C N = a testszegmentek száma, C = a megkötöttség száma
: DOF = 3N - C Három dimenzió (3D): DOF = 6N - C N = a testszegmentek száma, C = a megkötöttség száma")
31
ízület rotaciós DOF transzlációs DOF Érintkezési felület tojás nyereg nem csúszó henger csúszó henger 3211232112 0001200012 állandó nem állandó gömb

32
Megkötöttség Anatómiai adjunctus (független) Conjunctus vagy összekötött ( az izületek mozgása egymástól függ)
 Conjunctus vagy összekötött ( az izületek mozgása egymástól függ)")
33
Nincs megkötöttség síkban Az alsó tag cilinderben történő megkötött mozgása behatárolja a többi csuklóban a mozgási szabadságfokot. A levegőben (légüres tér) a súlypont pályája nem változtatható meg. Ezért, ha test valamelyik részén elmozdulás jön létre, akkor a test másik oldalán azonos nagyságú mozgásnak kell bekövetkeznie. Következésképpen az ízületi szögváltozások és szögterjedelmek behatároltak.
 a súlypont pályája nem változtatható meg. Ezért, ha test valamelyik részén elmozdulás jön létre, akkor a test másik oldalán azonos nagyságú mozgásnak kell bekövetkeznie. Következésképpen az ízületi szögváltozások és szögterjedelmek behatároltak..")
34
Aktuális (pedálozás) Mechanikai (egyensúly, megcsúszás) Motoros feladat ( instrukció)
 Mechanikai (egyensúly, megcsúszás) Motoros feladat ( instrukció)")
35
F = mobilitás, I = az izület osztálya, j i = az izületek száma az I osztályban i = 6 -f, f= a szabadságfok száma A kinematikai lánc mobilitása F = 6N - i j i 5 I=3

36
Harmadosztályú izület: 29 (3 DOF) Negyedosztályú izület: 33 ( 2 DOF) Ötödosztályú izület: 85 ( 1 DOF) F = (6148) - [(3 29) + (4 33) + (5 85)] = 244
![Harmadosztályú izület: 29 (3 DOF) Negyedosztályú izület: 33 ( 2 DOF) Ötödosztályú izület: 85 ( 1 DOF) F = (6148) - [(3 29) + (4 33) + (5 85)] = 244](http://images.slideplayer.hu/41/11249171/slides/slide_36.jpg "Harmadosztályú izület: 29 (3 DOF) Negyedosztályú izület: 33 ( 2 DOF) Ötödosztályú izület: 85 ( 1 DOF) F = (6148) - [(3 29) + (4 33) + (5 85)] = 244")
37
MOZGÁSOK AZ ÍZÜLETEKBEN

38
FORGÁS

39
Csúszás (lineáris és nem lineáris transzláció)
")
40
Gördülés = rotáció + transzláció

41
2015.08.31

42
AZ ÍZÜLETEKRE HATÓ ERŐK

43
1. Nyomó (kompressziós) 2. Húzó (tenzilis) 3. Nyíró 4. Reakció
 2. Húzó (tenzilis) 3. Nyíró 4. Reakció")
44
A nyomóerő mindig merőleges a transzverzális síkra A húzóerő mindig merőleges a transzverzális síkra A nyírőerő mindig párhuzamos a transzverzális síkkal Transverzális sík

45
Nyíróerő (Fs) Reakcióerő (Fr) Nyomóerő (Fc) Reakcióerő (Ft) (Fc) (Fs) Fr = Ft
 Reakcióerő (Fr) Nyomóerő (Fc) Reakcióerő (Ft) (Fc) (Fs) Fr = Ft")
46
(Fc 1 ) Fc 2 Fs 1 Fs 2 Fc Fs Fr Fc 1 Fs 1 Fs 2 Fc 2 Reakcióerő
 Fc 2 Fs 1 Fs 2 Fc Fs Fr Fc 1 Fs 1 Fs 2 Fc 2 Reakcióerő")
47
AZ ERŐK MEGHATÁROZÁSÁNAK MÓDSZEREI 1. GRAFIKUS 2. SZÁMÍTÁS 3. MÉRÉS 4. MÉRÉS ÉS SZÁMÍTÁS statikus és dinamikus direkt és inverz

49
Nyomaték egyensúly Összes nyomaték = (Fm x dF) – (W1 x dW1) + (W2 x DW2) = 0 (Fm x dF) = (W1 x dW1) + (W2 x DW2) Mm = M1 + M2 izometriás Mm > M1 + M2 koncentrikus Mm < M1 + M2 excentrikus
 – (W1 x dW1) + (W2 x DW2) = 0 (Fm x dF) = (W1 x dW1) + (W2 x DW2) Mm = M1 + M2 izometriás Mm > M1 + M2 koncentrikus Mm < M1 + M2 excentrikus")
50
Erőkar rendszer

51
Első osztályú emelő Másodosztályú emelő

52
Harmadosztályú emelő

53
1 st 2 nd 3 rd

54
Az ízületek által elviselhető legnagyobb nyíró, húzó és nyomóerő

55
G1G1 G2G2 NYOMÓERŐ Fk = G 1 G 1 + G 2 G 1 + G 2 Fh = G 2 HÚZÓERŐ G1G1 G2G2

56
G1G1 G2G2 Fk = G 1 +F1 +F2 G 1 + G 2 G 1 + G 2 Fk =(F1 +F2) -G 2 F1F1F2F2 NYOMÓERŐ HÚZÓERŐ Fk = 0 F1 +F2 =G 2 G1G1 G2G2
 -G 2 F1F1F2F2 NYOMÓERŐ HÚZÓERŐ Fk = 0 F1 +F2 =G 2 G1G1 G2G2")
57
NYÍRÓERŐ G G G = Gny Gny GhGh

58
G Fny Fh A G súlyerő húzó-, és nyíróerő komponenseinek meghatározása

59
A G erő nyomó-, és nyíróerő komponenseinek meghatározása G Fny Fk

60
=mért = 180 - A végtagok súlyerejének hatása az ízületekre G Gny Gh Transzverzális sík A végtag súlypontja feljebb helyezkedik el,mint a forgás középpontja

61
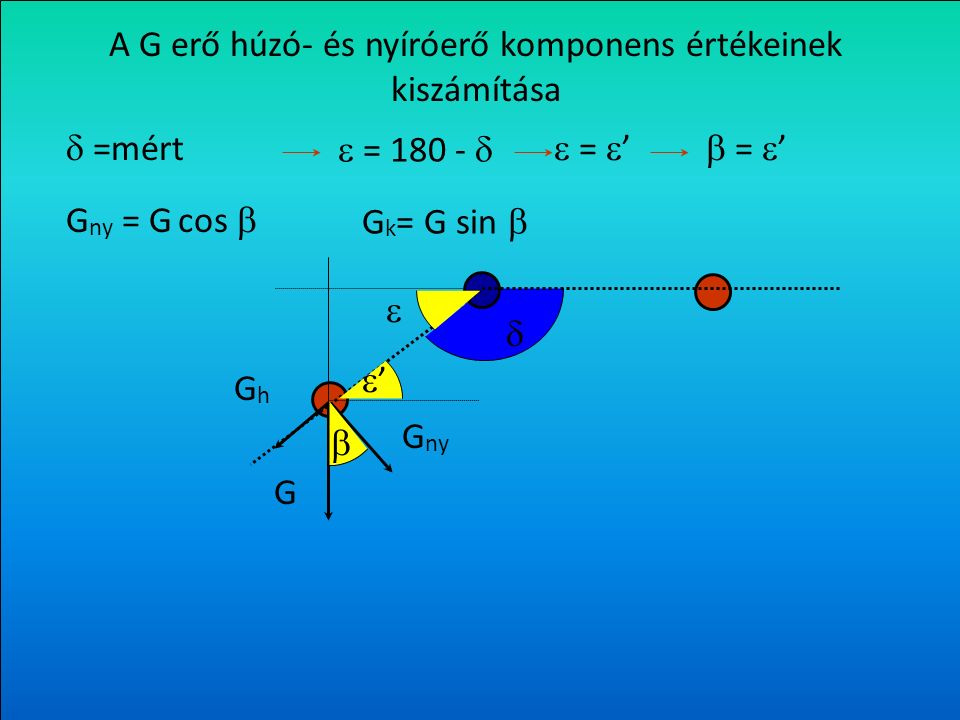
=megmért = 180 - = ’ A G súlyerő húzó- és nyíróerő komponens értékeinek kiszámítása G Gny = G cos Gh= FG sin Gny Gh ’’ = ’

62
Transzverzális sík G Gny Gk A végtag súlypontja feljebb helyezkedik el,mint a forgás középpontja G= az alsó végtag súlyereje; Gk = a súlyerő nyomóerő (kompressziós erő) komponense; Gny = a súlyerő nyíróerő komponense
 komponense; Gny = a súlyerő nyíróerő komponense")
63
Transzverzális sík G Gny GkGk Fny = Finy + (-Gny) Fk = Fik + Gk FiFi Finy Fik Az ízületre ható összes nyomó és húzóerő G= az alsó végtag súlyereje; Gk = a súlyerő nyomóerő (kompressziós erő); Gny = a súlyerő nyíróerő komponense; Fi = izoemrő; Fik = az izomerő nyomóerő komponense; Finy = az izomerő nyíróerő komponense. Mivel Gny és Finy ellentétes irányba mutat, a két nyíróerő kivonódik egymásból, azaz a két nyíróerő komponens csökkenti a nyíróerőt az ízületre. Mivel Gny és Finy ellentétes irányba mutat, a két nyíróerő kivonódik egymásból, azaz a két nyíróerő komponens csökkenti a nyíróerőt az ízületre.

64
A forgatónyomaték kiszámítása dinamikus erőkifejtés során M= forgatónyomaték; m = a végtag tömege; r = a végtag tömegközéppontjának távolsága a forgástengelytől; t= a szögelfordulás ideje; = szögsebesség; = ízületi szög

65
Forgatónyomaték (M) számítás m mg k Erő(teher) kar= a forgáspontból az erő hatásvonalára bocsátott merőleges egyenes hossza Statikus helyzetben m= 5 kg r= 0,2 m k = 0,14 m szög = 45 r
 számítás m mg k Erő(teher) kar= a forgáspontból az erő hatásvonalára bocsátott merőleges egyenes hossza Statikus helyzetben m= 5 kg r= 0,2 m k = 0,14 m szög = 45 r")
66
r m m= 5 kgr= 0,2 m t= 0,05 s = 45 = 0,785 rad = 900 /s = 15,7 rad/s Forgatónyomaték (M) számítás Dinamikus körülményben =tehetetlenségi nyomaték (mr 2 ); β = szöggyorsulás; = szögsebesség
 számítás Dinamikus körülményben =tehetetlenségi nyomaték (mr 2 ); β = szöggyorsulás; = szögsebesség")
67
Erőmérés könyökhajlítók példáján és a forgatónyomatékok kiszámítása M = Fmért k FiFi Fmért kiki ki Fmért k = Fi ki Fi = Fmért k / ki k Mi = Fi ki Biceps brachii Brachioradialis Brachialis Erőmérő Amennyiben az erőmérő huzalát merőleges az alkar hosszúsági tengelyére, akkor a mért erő erőkarja egyenlő a rögzítés helye és az ízületi forgástengely közötti távolsággal, mivel a két egyenes merőleges egymásra. Fmért = az erőmérő eszköz által mért erő; k= a mért erő erőkarja; Fi = a biceps brachii ereje; ki = a biceps brachii erőkarja; A mért erő forgatónyomatéka A z izom forgatónyomatéka A forgatónyomatékok egyensúlya Az izom által kifejtett erő

68
Az izomerő (Fi) kiszámítása térdfeszítő izom példáján G kGkG FiFi ki G · kG = Fi · ki Fi = G · kG / ki Patella ín Quadriceps femoris 45 fokos térdszögben az alsó végtag (+ lábfej) súlyerejének az erőkarja nagyobb, mint a térdfeszítő izomfejek erőkarja. Ebből következik, hogy az izomnak nagyobb erőt kell kifejteni, mint a súlyerő.

69
Az Fi erő nyomó- és nyíróerő komponens értékek kiszámítása G FiFi Fi = FG · kG / ki Fik Finy Fik = Fi · cos = Fi · sin Fik – az izom által kifejtett erő nyomó vagy kompressziós (k) erő komponense; Finy - az izom által kifejtett erő nyíróerő (ny) komponense
 erő komponense; Finy - az izom által kifejtett erő nyíróerő (ny) komponense")
70
A térdízületre ható összes nyomó- és nyíróerő kiszámítása G FiFi F ik F iny Fik = Fi · cos = Fi · sin Gny GhGh = G · cos Gh= G · sin Fny = Finy +(- Gny) Fk = Fik + (- Gh) Fi – a térdfeszítő ereje, Fik – a térdfeszítők nyomóerő komponense, Finy – a térdfeszítők nyíróerő komponense, G. az alsó tag súlyereje, Gk – súlyerő nyomóerő komponense, Gny – a súlyerő nyíróerő komponense, - az izom húzásának iránya és alsó tag hosszúsági tengelye által bezárt szög, γ – a súlyerő vonala és a nyírerő iránya által bezárt szög.

71
A REAKCIÓERŐ KISZÁMÍTÁSA G FiFi Fik Finy Gny GhGh Fr Fny = Finy +(- Gny) Fk = Fik + (- Gh) Fny – nyíróerő, Fk – nyomóerő, Fi – az izom által kifejtett erő, amely egyenlő a patella ínra ható húzóerővel, G – a mozgatott végtag nehézségi ereje, Fr -reakcióerő Ízületi forgástengely Transzverzális sík
 Fk = Fik + (- Gh) Fny – nyíróerő, Fk – nyomóerő, Fi – az izom által kifejtett erő, amely egyenlő a patella ínra ható húzóerővel, G – a mozgatott végtag nehézségi ereje, Fr -reakcióerő Ízületi forgástengely Transzverzális sík")
73
’’ =mért = 180 - = ’ = ’ A G erő húzó- és nyíróerő komponens értékeinek kiszámítása G G ny = G cos G k = G sin G ny GhGh

74
Az izomerő (F m ) kiszámítása G lGlG FmFm l Fm G · l G = F m · lFm F m = G · l G / l Fm
 kiszámítása G lGlG FmFm l Fm G · l G = F m · lFm F m = G · l G / l Fm")
75
Az F m erő nyomó- és nyíróerő komponens értékek kiszámítása G FmFm F m = G l G / lFm F mk F mny Fmk = F m cos = F m sin

76
Az F m erő nyomó- és nyíróerő komponensének kiszámítása G FmFm F mk F mny Fmk = F m cos = F m sin G ny GhGh = G cos G h = G sin Fny = Fmny +(- G ny ) Fk = Fmk + (- G h )
 Fk = Fmk + (- G h )")
77
A REAKCIÓERŐ KISZÁMÍTÁSA G FmFm Fmk Fmny G ny GhGh Fny = Fmny + (-G ny ) Fk = Fmk + (-G h ) Fr
 Fk = Fmk + (-G h ) Fr")
78
Erőmérés Fmér t ki k F F= Fmért · sin ϴM= F · k FiFi Mi= Fi · ki Fi=F · k/ ki

79
Erőmérés Fmér t ki M= Fmért · k1 k1k1








 A Nap sugárzásából. B) A magma hőjéből. C) A Föld forgási.>")














