Mesterséges Intelligencia 1
Eddig a környezet teljesen megfigyelhető és determinisztikus volt, az ágens tisztában volt minden cselekvésének következményével. Ebből kifolyólag az ágens pontosan ki tudja számítani, hogy egy tetszőleges cselekvésszekvenciának milyen állapot az eredménye, és azt is tudja, hogy ő maga milyen állapotban van. Az érzékelései nem nyújtanak új információt az egyes cselekvések után. De mi van akkor, ha a cselekvésekről és állapotokról alkotott tudás nem teljes? 2
A nem teljesség különböző formái három problématípushoz vezetnek: Szenzor nélküli (conformant) problémák: Ha az ágensnek egyáltalán nincsenek szenzorjai, akkor a több lehetséges kezdeti állapot egyikében lehet, és minden cselekvése a lehetséges követő állapotok egyikéhez vezethet. 3
Eshetőségi (contingency) problémák: Ha a környezet részben megfigyelhető, vagy ha a cselekvések bizonytalanok, akkor az ágens érzékszervei új információt nyújtanak minden cselekvés után. Minden lehetséges érzékelés egy eshetőséget határoz meg, amire az ágensnek terveznie kell. A problémát ellenfél problémának (adversarial) hívják, ha a bizonytalanságot egy másik ágens cselekvései okozzák. 4
Felfedezéses (explorational) probléma: Ha a környezet állapotai nem ismertek, az ágensnek külön cselekednie kell, hogy azokat felderíthesse. A felfedezési problémákat az eshetőségi problémák szélsőséges változatának lehet tekinteni. 5
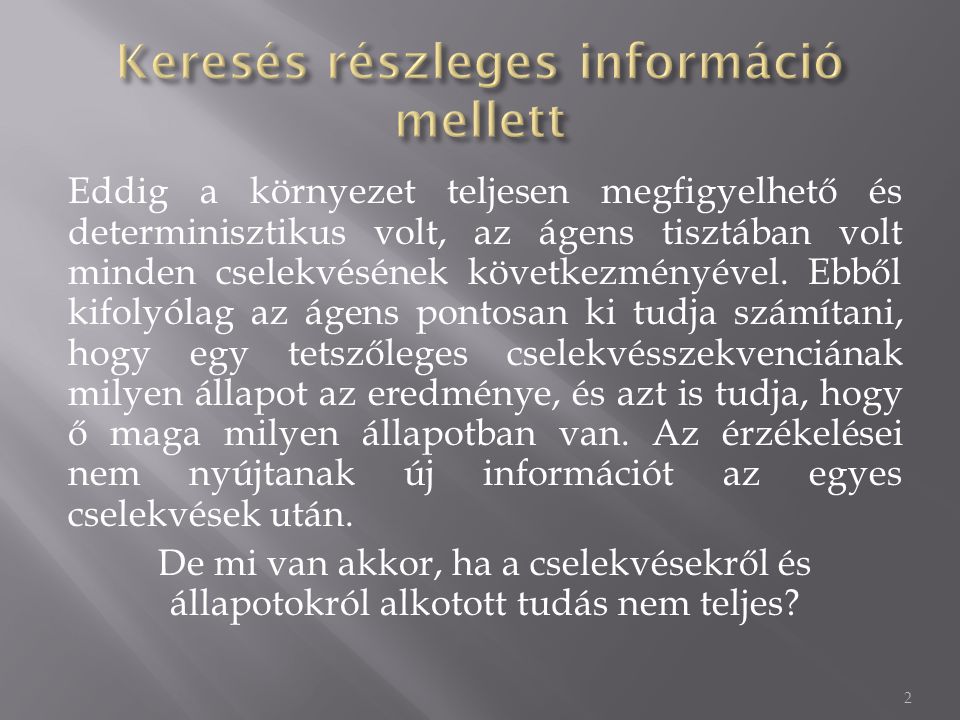
3.1. ábra: A porszívóvilág 8 lehetséges állapota. 6
Tegyük fel, hogy a porszívóágens ismeri az összes cselekvésének a hatását, de szenzorokkal nem rendelkezik. Ekkor csak azt tudja, hogy kezdeti állapota a (1,2,3,4,5,6,7,8) halmaz egy eleme. Mivel tudja, hogy cselekvései mire képesek, kiszámíthatja, hogy a Jobbra cselekvés a (2,4,6,8) állapotok egyikébe viszi, a Jobbra,Szív cselekvéssorozat eredményeképpen a (4,8) állapot egyikében köt ki. A Jobbra, Szív, Balra, Szív sorozattal garantáltan eléri a (7) célállapotot függetlenül a kezdeti állapottól. Erre azt mondjuk, hogy az ágens a világot a 7. állapotba bele tudja kényszeríteni (coerce) akkor is, ha nem tudja honnan indult. 7
Mely lépésekkel lehet az ágenset az 1-es mezőbe kényszeriteni?
Ha a világ nem teljesen megfigyelhető, az ágensnek az egyedi állapotokkal szemben azon állapothalmazokra kell tudni következtetni, amely halmazok állapotaiba eljuthat. Minden ilyen állapothalmazt egy hiedelmi állapotnak nevezünk (belief state), amely az ágens pillanatnyi hiedelmét fejezi ki, hogy ő maga vajon milyen fizikai állapotban lehet most. A teljesen megfigyelhető környezetben minden hiedelmi állapot egyetlen fizikai állapotból áll. 9
Ahhoz, hogy egy szenzor nélküli problémát megoldhassunk, a fizikai állapotok terében történő keresés helyett a hiedelmi állapotok terében kell keresni. A kezdeti állapot egy hiedelmi állapot, és minden cselekvés egy hiedelmi állapotot egy másik hiedelmi állapotba képez le. 10
3.2. ábra: A determinisztikus szenzor nélküli porszívóvilág hiedelmi állapotterének hozzáférhető része. 11
Csak 12 hozzáférhető hiedelmi állapot létezik, az egész hiedelmi állapottér azonban tartalmazza a fizikai állapotok minden lehetséges halmazát, azaz 2 8 =256 hiedelmi állapotot. Ha a fizikai állapottérnek S állapota van, a hiedelmi állapottér állapotainak száma 2 S. 12
Ha a környezet jellege olyan, hogy az ágens a cselekvéseit követően szerezhet új információt a szenzorjai réven, eshetőségi problémáról (contingency problem) beszélünk. Egy eshetőségi probléma megoldása sokszor egy fa alakját veszi fel, ahol egy-egy ágnak a kiválasztása azon múlik, hogy odáig az ágens milyen érzékelésekhez jutott. 13
Tegyük fel, hogy az ágens rendelkezik helyzetérzékelővel és lokális koszérzékelővel, de nincs olyan szenzorja, amely detektálná a koszt más négyzetekben. A [B,kosz] érzékelés azt jelenti, hogy az ágens az [1,3] állapotok egyikében van. A [szív, jobbra, szív] cselekvéssorozat biztosan feltakarítja mind a két helyiséget, de lehet, hogy felesleges lépést is végre fog hajtani. 14
Cél: mind a két helyiség tiszta [B,kosz](1,3) állapotok valamelyike szív(5,7) állapotok egyike jobbra(6,8) állapotok egyike szívha (6) akkor cél, ha (8) akkor felesleges szívás Egy rögzített cselekvéssorozat se garantálja a probléma megoldását. 15
Akkor lesz megoldásunk ha lemondunk a cselekvések szigorú sorrendjéről: [szív, jobbra, ha(jobbra,kosz) akkor szív] A megoldások terét azzal a lehetőséggel bővítjük, hogy a cselekvéseket a végrehajtás alatt megjelenő eshetőségek alapján választjuk. Mivel a pontos előrejelzés sűrűn lehetetlen, a valós világ számos problémája eshetőségi probléma. 16
17