A hiba-előjel alapú FxLMS algoritmus analízise Orosz György Konzulensek: Péceli Gábor, Sujbert László Budapesti Műszaki és Gazdaságtudományi Egyetem Méréstechnika és Információs Rendszerek Tanszék 16 th PhD Mini-Symposium február 2.
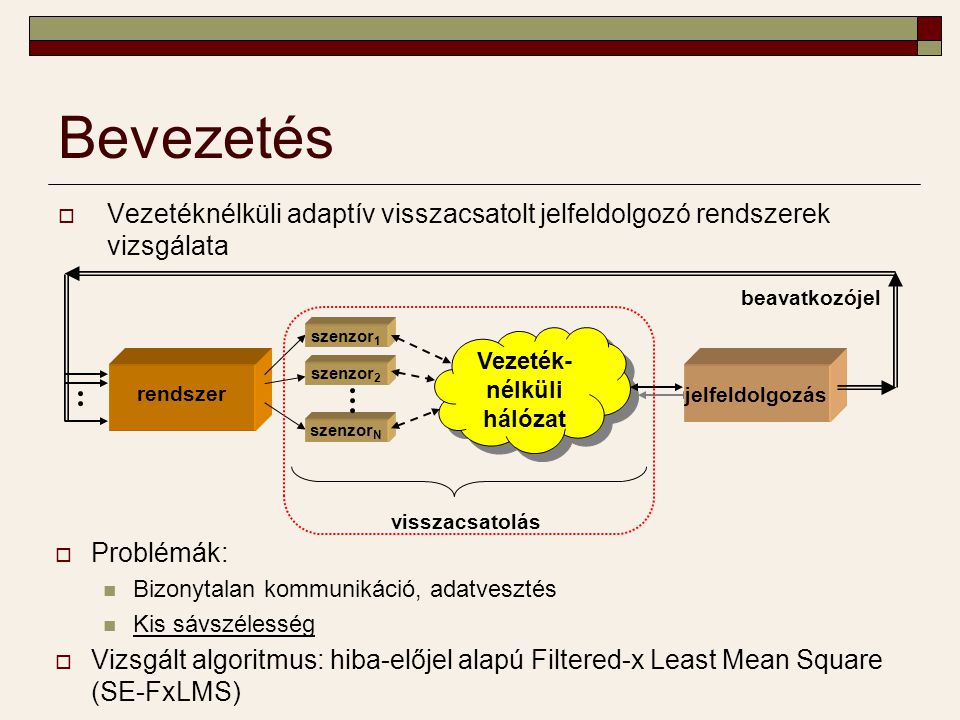
Bevezetés Vezetéknélküli adaptív visszacsatolt jelfeldolgozó rendszerek vizsgálata Problémák: Bizonytalan kommunikáció, adatvesztés Kis sávszélesség Vizsgált algoritmus: hiba-előjel alapú Filtered-x Least Mean Square (SE-FxLMS) rendszer szenzor 1 szenzor 2 szenzor N Vezeték- nélküli hálózat jelfeldolgozás beavatkozójel visszacsatolás
Az FxLMS algoritmus 1. Adaptív szűrővel megvalósított szabályozási algoritmus Felhasználási területek: bonyolult átviteli függvény (nem szükséges analitikusan ismerni) sztochasztikus alapjel
Az FxLMS algoritmus 2. S(z) : szabályozandó rendszer w n : adaptív szűrő: w n =[w 0,n … w N–1,n ] T u n : beavatkozójel y n : alapjel x n : referenciajel, korrelál y n -nel e n =y n –y’ n +n n : hibajel Ŝ(z) : rendszermodell r n : szűrt referenciajel r n =[r n … r n–N+1 ] T Alkalmazás pl. aktív zaj és rezgéscsökkentés Optimumkeresési feladat: w opt = argmin Ŝ(z)Ŝ(z)FxLMS wnwn S(z)S(z) xnxn rnrn unun y’ n ynyn enen n + + – adaptív algoritmus: w n+1 = w n +µr n e n
A hiba-előjel alapú FxLMS algoritmus (SE-FxLMS) A hibajel helyett annak előjelét használjuk Matematikai háttér: w opt = argmin Kedvező számításigény Csökkenő adat- mennyiség a visszacsatoló hurokban Hiba-előjel elv alkalmazása adattömörítésre Ŝ(z)Ŝ(z)SE-FxLMS wnwn S(z)S(z) xnxn rnrn unun y’ n ynyn enen n + + – adaptív algoritmus: w n+1 = w n +µr n sign(e n ) µ: konvergenciaparaméter 1 −1−1 enen
Alkalmazási példa Vezetéknélküli aktív zajcsökkentő rendszer DSP: jelfeldolgozás, adaptív algoritmus futtatása Szenzor: zajérzékelés S(z) szabályozandó szakasz: akusztikus rendszer y n : zaj, y’ n : ellenzaj b bites adatok esetén a rádiós hálózatban továbbított hasznos adatok mennyisége b -ad részére csökken szenzor DSP gateway zajforrás − y’n− y’n ynyn rádiós kommunikáció sign(e n ) [+++−−…−−−+] t enen − − … − − − + S(z)S(z)
Algoritmus analízise (paramétertér) Algoritmus: w n+1 = w n +µr n sign(e n ) Hiba nagyságától független lépésköz FxLMS és SE-FxLMS összehasonlítása (két paraméter w 1, w 2 ): FxLMSSE-FxLMS FxLMS és SE-FxLMS w opt közelében w n+1 = w n +µr n e n w n+1 = w n +µr n sign(e n )
Állandó paraméterhiba nem zérus hibajel Analízis a SE-LMS felhasználásával, ahol S(z)=1 S(z) rendszer hatása egy zajszerű tag ( h n ), melynek számítható a felső korlátjának várható értéke E{| h n |} : Felső becslés az állandósult állapot átlagos abszolút hibájára: µ -vel arányos a hiba µ -nagyságától függetlenül korlátos hiba Algoritmus analízise (hibajel)
Szimulációs eredmény Szimulációs paraméterek: S(z) : másodrendű rendszer N = 10 (paraméterszám) µ = 10 –3 Referenciajel ( x n ): Gaussi fehér zaj, σ = 1 E a = (szimuláció) E a ≤ (felső korlát) Hibajel értéke FxLMS és SE-FxLMS algoritmus esetén
Összefoglalás, kitekintés A hiba-előjel alapú SE-FxLMS algoritmus kifejlesztése SE-FxLMS algoritmus analízise Felső korlát számítása a hibajel abszolút értékének átlagára Eredmények ellenőrzése szimulációval Cél: az algoritmus vizsgálata MIMO rendszerek esetén