Előadást letölteni
Az előadás letöltése folymat van. Kérjük, várjon

1
VÉDELMI CÉLÚ AUTONÓM MOBIL ROBOTIKAI ALKALMAZÁSOK DOKKOLÁSI MEGOLDÁSAI
Kucsera Péter ZMNE Doktorandusz hallgató ROBOTHADVISELÉS 7. TUDOMÁNYOS KONFERENCIA

4
A mobil robot fejlesztés eddigi lépései

5
A fejlesztés célja 2007-ben a Phoenix Contact Xplore pályázatán a BMF Műszertechnikai és Automatizálási laboratóriuma kiválasztásra került és ezzel elnyerte a 3000 eurós keretet egy innovatív automatizálási megoldás realizálására.

6
A rendszer feladata Autonóm működésű mobil robot, mely a fedélzetén lévő szenzorok segítségével képes a helyzetének meghatározására. Képes pontos dokkolásra, egy telepített képfelismerő rendszer rávezetésével. Ipari komponensekből felépített rendszer, mely alapja lehet további fejlesztéseknek.

7
Főbb irányelvek Moduláris rendszer Szabványos ipari elemek
Szabványos kommunikáció Rövid fejlesztési idő Nagy megbízhatóság Előnyök:

8
A megvalósítani kívánt rendszer felépítése

9
Mobil robot szenzorrendszerének főbb feladatai
Helymeghatározás – a robot pozícióinak pontos meghatározása Akadály felismerés – a dinamikus környezetben felmerülő akadályok felismerése és kezelése

10
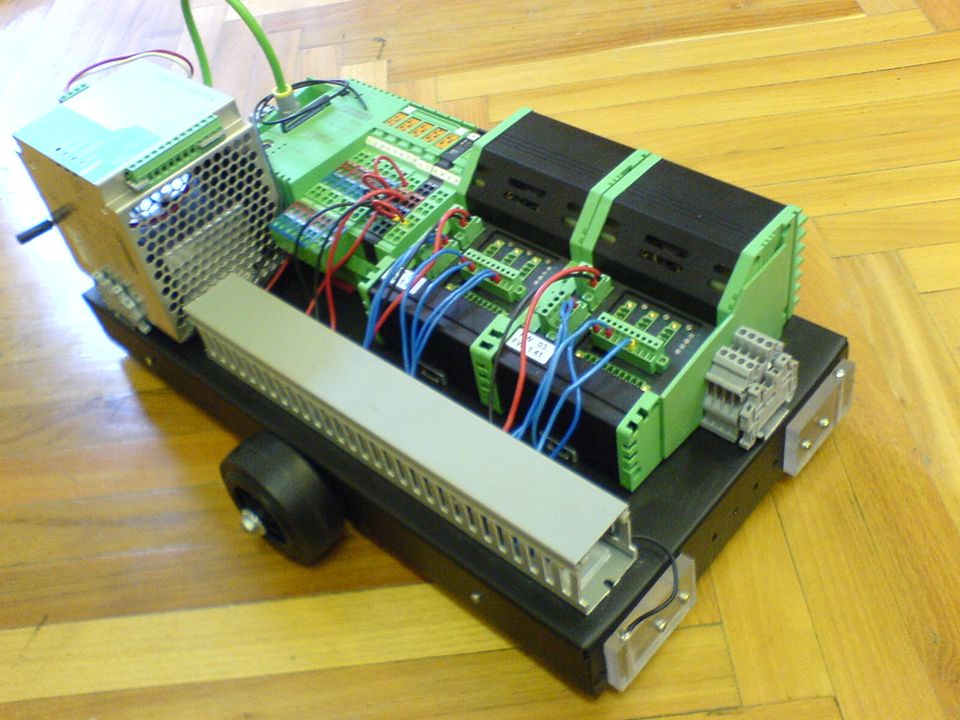
A mobil egység felépítése

11
IB IL EC AR 48/10A servo hajtás

12
Pozíció meghatározása az optikai elfordulás érzékelők jeleiből

13
Optikai elfordulásérzékelő
Optical Rotary Encoder

14
Ultrahangos távolságmérő
Ultrasonic sensors Futási idő mérés segítségével történő távolságmérés

15
Lézer szkenner Laser rangefinder

16
Képfeldolgozás elven működő helymeghatározó rendszer

17
Szabványos ipari kommunikáció
BLUETOOTH

20
Dokkoló állomás

21
Köszönöm a figyelmet

Hasonló előadás



>")


















