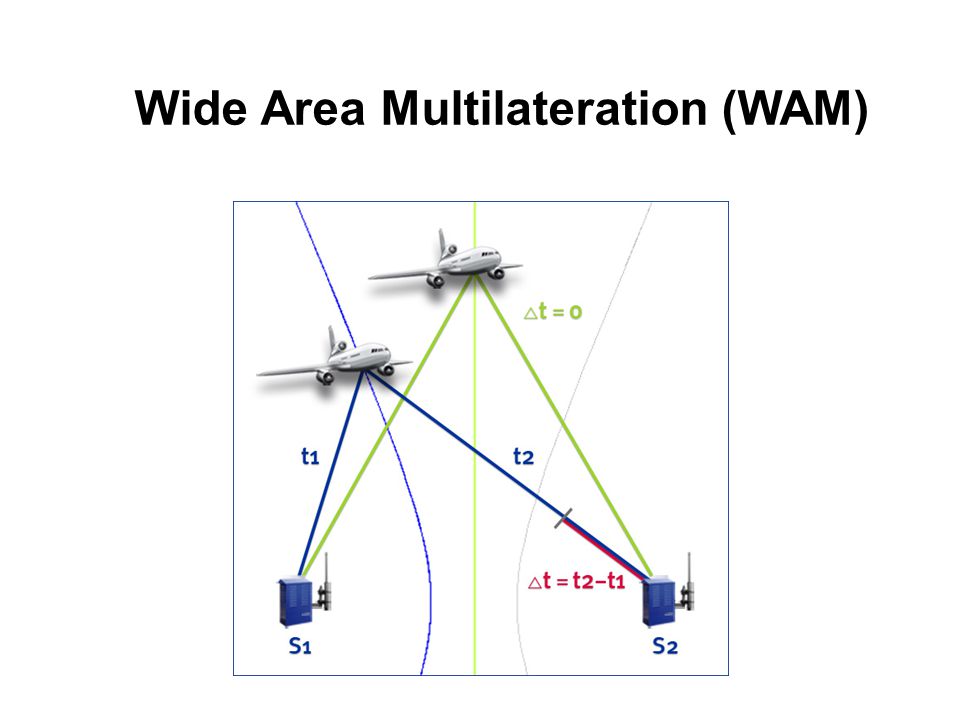
Wide Area Multilateration (WAM)
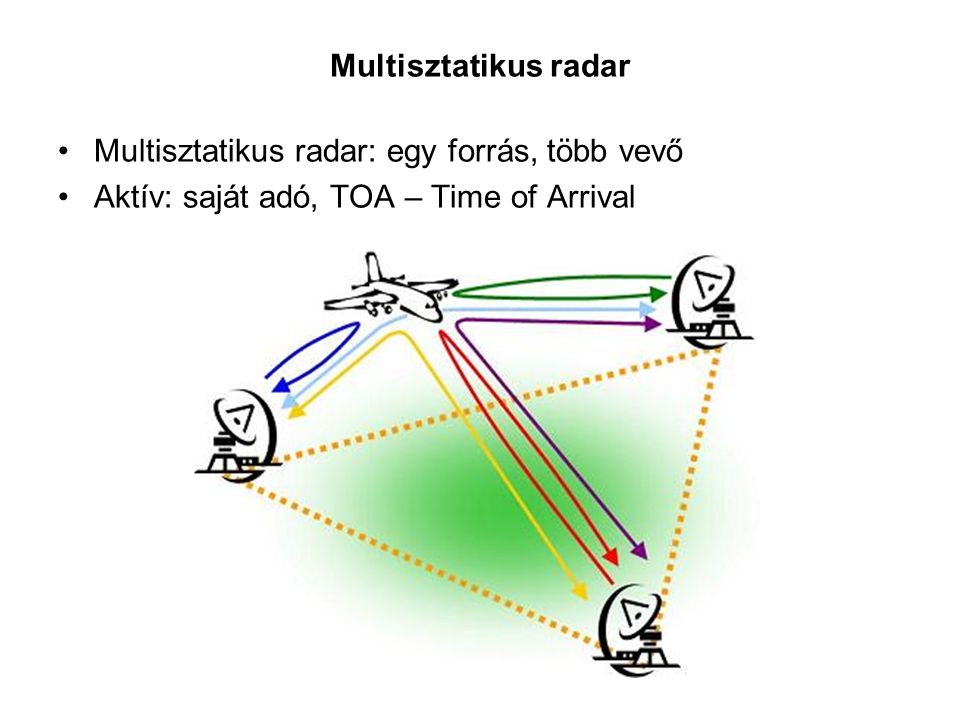
Multisztatikus radar Multisztatikus radar: egy forrás, több vevő Aktív: saját adó, TOA – Time of Arrival
Multilateráció Passzív: külső, független jelforrás (pld. SSR transzponder) TDOA – Time Difference of Arrival TDOA Multilateráció, hiperbolikus helymeghatározás
Multilaterális elrendezés
A multilaterális elrendezés TDOA – Time Difference of Arrival
Hiperbola, hiperboloid Definíció: A hiperbola azoknak a P pontoknak a mértani helye a síkon, amelyek a sík két adott pontjától, az F1 és F2 fókuszpontoktól való távolságaik (r1, és r2 vezérsugarak) különbségének abszolút értéke állandó (2a). |r1-r2|=állandó=2a
Hiperbola felület kialakulás 0-2 mérőpontokra
Hiberboloidok metszéspontja
Milyen jeleket használhatunk? Identification Equipment availability Signal properties PSR No High Poor SSR Mode 3/A Good SSR Mode S Mode 3/A, 24-bit address Increasing Mode S Squitter 24-bit address Mode S Extended Squitter VDL Mode 4 Regionally high UAT Average Radio Altimeter VHF DF ACARS VDL Mode 2 Airborne Weather Radar
Alapprobléma: időszinkron biztosítása
WAM szinkronizációs lehetőségek
Közös óra
Lokális órák
Lokális órák transzponderes szinkronnal
Lokális órák GPS szinkronnal
Lokális órák GPS szinkronnal (azonos műholdakkal)
Accuracy* Baseline Link Choice Line of Sight Common Clock Medium WAM szinkronizációk összevetése Accuracy* Baseline Link Choice Line of Sight Common Clock Medium Microwave Fibre Yes No Transponder Sync Any Standard Low Common View High Large
WAM rendszer realizáció Lokális órák GPS szinkronnal
GPS alapú szinkronizáció megvalósítása PLL alapú referencia-órajel szolgáltatás PPS Referencia-órajel (1 Hz 107 Hz)
Modelláramkör
GPS alapú referencia óra
Mérési eredmények I. Közös „PPS” jel 10 perc 6 ns s mért 4 ns s eszköz
30 perc Két független eszköz 49 ns s szórás
WAMLAT rendszer
RF vevő
RF vevő
Adatfeldolgozó egység
Első tesztmérés
Megjelenítés Köszönöm a figyelmet!