Előadást letölteni
Az előadás letöltése folymat van. Kérjük, várjon

1
Termelési folyamatok automatizálása
Kucsera Péter

2
A vezérlő rendszer felépítése
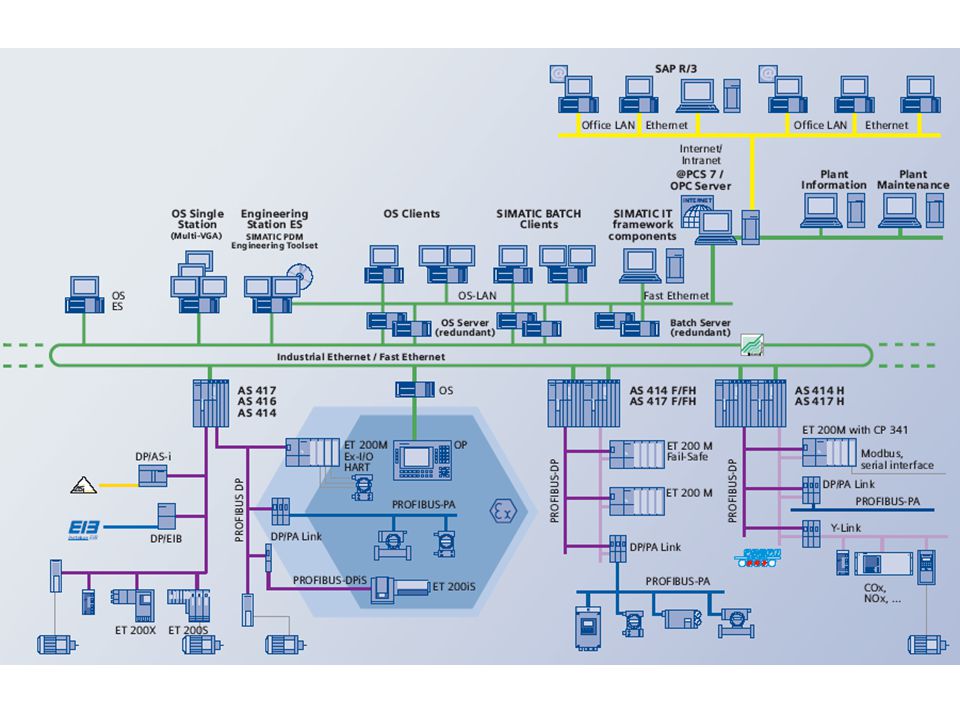
Szabályzó program Beavatkozó Vezérelt vagy Szabályozott szakasz Szabályzó Beavatk. hajtás Beavatk. egység Távadó Távadó Szenzor Operátor állomás Automatic control has greater safety for the process or machine and operator, and reduced operating costs due to improved utilization and reduction in manpower requirements. Process, plant folyamat, a folyamat matematikai modellje Sensor érzékelő Transmitter | transducer távadó | jelátalakító, jelváltó actuating unit, ~ drive beavatkozó szerv, működtető szerv actuator végrehajtó Controller irányító berendezés Operator desk irányító pult Szabványos jelek Gyártás Megjelenítő program SCADA (Supervisory control and data acquisition) Simulation software
 Simulation software.")
4
ES ES – Engineering Station – Mérnöki állomás
Az ES-n történik a rendszer 95%-ának konfigurálása a programfejlesző software segítségével. Itt kell elkészíteni a projektet, amit a AS-ekbe, OS/BATCH/Route Control szerverekbe és kliensekbe le kell tölteni. Egy rendszerben több ES is lehet, ezáltal több mérnök is együtt tud dolgozni a projekten. Multiprojekt engineeringet használva a multiprojektben lévő projektek kerülnek szétosztásra az ES-ek között, míg multi user engineeringet használva a központi ES-en lévő multiprojektet lehet szerkeszteni bizonyos megkötések mellett. A mérnöki állomáson keresztül lehet felprogramozni az intelligens az intelligens terepi eszközöket.

5
OS OS – Operator station – Operátori állomás
Az operátori állomás alapvetően két részből áll, a szerverből és a kliensből. A szerver feladata, hogy az AS-ekkel kommunikáljon és az adatokat, üzeneteket tárolja, a kliens feladata, hogy a szerver által összegyűjtött adatokat a felhasználó számára megjelenítse. Kisebb rendszerek esetén a szerver és a kliens egy gépen is lehet, ezt a konfigurációt Single Stationnek nevezzük. Minél több adatot kell feldolgoznia a rendszernek, annál több szerverre van szükség, minél több adatot kell megjeleníteni, annál több kliensre van szükség, egy kliensre akár több monitor is csatlakozhat. Egy szerverre több kliens, egy kliens pedig több szerverre is csatlakozhat. Ahhoz, hogy a rendszer megbízhatósága magasabb legyen, a szerverek redundánssá tehetők. Az OS szerver feladata többek között a folyamatból érkező adatok és üzenetek archiválása is.

6
AS AS – Automation station
Az automation station-ök PLC-kből álló állomások. Ezek az állámások lehetnek egyszerű, rendundáns és hibabiztos (Fail-safe) állomások is. Egy rendszerbe több AS is beépíthető. Az AS-ekhez számos, különböző célra készített periféria: digitális be/kimenetek analóg be/kimenetek csatlakoztathatók PROFIBUS DP-n, PROFIBUS PA‑n, valamint az ezekhez készített buszátalakítókon keresztül.
 állomások is. Egy rendszerbe több AS is beépíthető. Az AS-ekhez számos, különböző célra készített periféria: digitális be/kimenetek analóg be/kimenetek csatlakoztathatók PROFIBUS DP-n, PROFIBUS PA‑n, valamint az ezekhez készített buszátalakítókon keresztül.")
7
Az operátor állomás feladata
- A technológia folyamatinformációkat hordozó folyamatjellemzőinek gyűjtése, feldolgozása, és ezek különböző formában történő megjelenítése, következtetések levonása. Archiválási feladatok ellátása Jegyzőkönyvek, protokollok készítése Zavarjelentések készítése, analízise, hibaüzenetek megjelenítése A terepen üzemelő irányító berendezések működésének megfigyelése, diagnosztizálása. Dokumentáció készítése

8
Az operátor állomás hardware felépítése
Az operátor állomást jellemzően egy vagy több nagy teljesítményű számítógép alkotja. A számítógépek képesek a beérkező adatmennyiség feldolgozására és megfelelő módon történő megjelenítésére. Az operátor állomás jellemzően Ethernet vagy Profinet hálózaton kapcsolódik a irányító berendezésekhez, szintén Ethernet hálózaton kapcsolódhat esetleges magasabb vállalat irányítási rendszerekhez is. A megjelenítés egy vagy több monitoron történik. Egy számítógéphez maximálisan 2-4 monitor kapcsolható, így amennyiben a technológia kiterjedtebb megjelenítést igényel, a operátor teremben több OP számítógép is elhelyezésre kerülhet. A monitorok jellemzően napjainkban TFT vagy LCD kivitelűek, szintén előfordulhat projektorral kivetített vizualizálás is. A kezelő általában a hagyományos billentyűzet egér segítségével kezeli az OP állomást, azonban előfordulhat egyes speciális alkalmazásoknál egyedi vezérlőpanel alkalmazása is. Ezen joystick és görgető golyó is helyet kaphat. Szekrénybe szerelt operátor felületnél jellemző Touch Screen alkalmazása. Így az utasítások kiadása a képernyő megfelelő módon történő megérintésével történik

9
OPC server Az OPC server olyan software alkalmazása, amely megteremti a kapcsolatot az operátor számítógépen futó vizualizáló (SCADA) software és a irányító eszkö (Pl. PLC) között. Az OPC server segítségével különböző megjelenítő software-k csatlakoztathatók különböző hardware elemekhez.
 software és a irányító eszkö (Pl. PLC) között. Az OPC server segítségével különböző megjelenítő software-k csatlakoztathatók különböző hardware elemekhez.")
10
Archiválás, dokumentáció, jegyzőkönyvek készítése
A szerzett információ tárolható merevlemezen valamint papír alapon. Papír alapú tárolás esetén valamilyen nyomtató eszköz használata szükséges. Az archiválás történhet optikai CD vagy DVD lemezekre történő írással is. Az operátor állomás feladata a rendszer állapotainak dokumentálása: Esemény naplózás (spontán események bekövetkezési idejének és az esetleges hibajelenségnek naplózása) Állapot naplózás Zavarjelenségek lefolyásának nyomon követése Műszaki és termelési adatok naplózása (adott rendszerességgel történő archiválás)
 Állapot naplózás. Zavarjelenségek lefolyásának nyomon követése. Műszaki és termelési adatok naplózása (adott rendszerességgel történő archiválás)")
11
Megjeleníthető képek Áttekintő kép (a technológia teljes áttekintése, csak a legfontosabb jellemzők kiemelésével) Grafikus képek (dinamikus elemeket tartalmazó kép. Az elemek változtatják színüket, helyzetüket…) Csoport képek (ugyan azon funkciót végző elemek összefoglalása) Trendek (folyamat változóinak idő függvényében történő ábrázolása) Napló (állapot és hibajelzéseket naplózását tartalmazó képek) Face Platek (egyes elemeket kiválasztva, azok tulajdonságainak állítására szolgáló felbukkanó ablak. Segítségével üzemmód kapcsolás, értékbeállítás, megfigyelés valósítható meg)
 Csoport képek (ugyan azon funkciót végző elemek összefoglalása) Trendek (folyamat változóinak idő függvényében történő ábrázolása) Napló (állapot és hibajelzéseket naplózását tartalmazó képek) Face Platek (egyes elemeket kiválasztva, azok tulajdonságainak állítására szolgáló felbukkanó ablak. Segítségével üzemmód kapcsolás, értékbeállítás, megfigyelés valósítható meg)")
12
Operátor felület feladatai
- Az irányítani kívánt technológia felügyelése Felvilágosítás a támadt zavarokról Beavatkozási lehetőség biztosítása az operátor számára Üzenetsor Menüsor Kijelző terület Stástus sor Kezelési terület

13
Áttekintő rész (Menüsor, üzenetsor)
Az áttekintő részben található az üzenetsor, melyben mindig az utolsó bejövő üzenet olvasható. Az üzenetek nyugtázása után az üzenet eltűnik a listából, azonban a nyugtázott üzenetek között nyomon követhető a nyugtázott üzenet, időpontja, valamint az felhasználó neve aki az üzenetet jóváhagyta ( nyugtázta ). Az áttekintő rész másik eleme a navigációs gombsor, melyek segítségével a SCADA képei között lehet választani. Ezeket a megjelenítő képek csoportokba vannak rendezve, és a csoportok nevei találhatóak a fő gombokon (a). A csoporton belüli alképeket a főgombok jobb oldalán elhelyezkedő gombot (b.) megnyomva tudjuk megnyitni. Ekkor az alábbi ábrához hasonló ablak jelenik meg, ahonnan kiválasztható a nekünk szükséges alkép.
. Az áttekintő rész másik eleme a navigációs gombsor, melyek segítségével a SCADA képei között lehet választani. Ezeket a megjelenítő képek csoportokba vannak rendezve, és a csoportok nevei találhatóak a fő gombokon (a). A csoporton belüli alképeket a főgombok jobb oldalán elhelyezkedő gombot (b.) megnyomva tudjuk megnyitni. Ekkor az alábbi ábrához hasonló ablak jelenik meg, ahonnan kiválasztható a nekünk szükséges alkép.")
14
Tag-ek feladata A Tag-ek az operátori felület változóinak tekinthetők.
Lehetnek: - Külső Tag-ek (Az irányító rendszerből kiolvasott változók, bemenetek, kimenetek vagy adatblokkok) - Belső változók (Az operátori felület működéséhez használt belső változók)
 - Belső változók (Az operátori felület működéséhez használt belső változók)")
15
A grafikus szerkesztőben elhelyezhető objektumok
Általános formák (vonal, kör, négyzet…) Windows objektumok (Gomb, Check box, slider …) „Ügyes objektumok” (Képek, I/O mező, státus bar …) Speciális objektumkészlet (technológiai ábrák, trendek, speciális kijelző mezők)
 Windows objektumok (Gomb, Check box, slider …) „Ügyes objektumok (Képek, I/O mező, státus bar …) Speciális objektumkészlet (technológiai ábrák, trendek, speciális kijelző mezők)")
16
Objektumok tulajdonságai
- Tulajdonságok (méret, szín, stílus, betűtípus, kiemelés, villogás, kitöltés, egyéb) - Események (egérrel történő kattintás, billentyű lenyomás, objektum változása…)
 - Események (egérrel történő kattintás, billentyű lenyomás, objektum változása…)")
17
Tulajdonságok dinamizálása
Lehetőség van egy tulajdonság tag-hez történő hozzárendeléséhez, így megvalósítható egy objektum dinamikus méretezése, pozicionálása. A Display (megjelenítés) tulajdonság BOOL típusú tag-hez történő hozzárendelésével az objektum a képernyőn ki-be kapcsolható
 tulajdonság BOOL típusú tag-hez történő hozzárendelésével az objektum a képernyőn ki-be kapcsolható.")
18
Példa a méret dinamizálására
A példában szereplő tartályban lévő szint kijelzésére használható egy téglalap elem (Rectangle), melynek magasságát dinamizáljuk (Height). Amennyiben az oszlop magasság túllép egy megadott maximumot, lehetőség van az oszlop színének pirosra váltására, vagy az oszlop villogtatására. Ezzel felhívható az operátor figyelme az esetleges veszélyre.
, melynek magasságát dinamizáljuk (Height). Amennyiben az oszlop magasság túllép egy megadott maximumot, lehetőség van az oszlop színének pirosra váltására, vagy az oszlop villogtatására. Ezzel felhívható az operátor figyelme az esetleges veszélyre.")
19
Display tulajdonság dinamizálása
Munkahengerek kitolt és behúzott állapotának vizualizálására használható az előre megrajzolt grafikus készletben található munkahenger kitolt és behúzott elemének egymáson történő elhelyezése. A változó egyik értékénél a kitolt, a másik értékénél a behúzott grafikus elem kerül megjelenítésre.

20
Dinamizálás további lehetőségei
C-Action C kódban írt program képes aktiválni a változtatásokat VBS-Action Egy speciális programnyelv segítségével lehet programokat, scripteket írni Tag-hez történő közvetlen hozzárendelés lehetséges

21
Események kezelése A események kezelése az objektum orientált programnyelvekhez hasonlóan (C++ builder, Delphi) történik. Az adott eseményt kiválasztva egy általunk c-ben vagy VBS-ben írt kód kerül lefuttatásra. Lehetőség van továbbá egy változóhoz, tag-hez egy érték hozzárendelésére is (Direct Connection). Pl. Ha egy gomb lenyomásának hatására egy tag értékét egybe szeretnénk állítani, majd, ha a gombot felengedjük a változó értékét ismét nullázni szeretnénk, a Direct Connection opciót választva először a Press Left (bal egérgomb lenyomás) hatására a tag-hez 1-es értéket rendelünk, majd a Release Left (bal egérgomb felengedés) esemény hatására ugyanazon tag-hez a 0- értéket rendeljük.
 történik. Az adott eseményt kiválasztva egy általunk c-ben vagy VBS-ben írt kód kerül lefuttatásra. Lehetőség van továbbá egy változóhoz, tag-hez egy érték hozzárendelésére is (Direct Connection). Pl. Ha egy gomb lenyomásának hatására egy tag értékét egybe szeretnénk állítani, majd, ha a gombot felengedjük a változó értékét ismét nullázni szeretnénk, a Direct Connection opciót választva először a Press Left (bal egérgomb lenyomás) hatására a tag-hez 1-es értéket rendelünk, majd a Release Left (bal egérgomb felengedés) esemény hatására ugyanazon tag-hez a 0- értéket rendeljük.")
22
Faceplate A PCS7 DCS rendszer nagy előnye, hogy a tervező mérnöknek nem kell minden Tag-et külön definiálni, valamint minden grafikus elemet külön megrajzolni. Meglévő könyvtárakban szép számban álnak rendelkezésre előre elkészített blokkok a legkülönbözőbb területek igényeinek kielégítésére. A kész blokkok alkalmazásával a program, a kódbol automatikusan generálja a Tag-eket, valamint a már dinamizált grafikus kezelőfelületet.

23
Faceplate példa A berendezések kezelése un. kezelői ablakok (faceplate) segítségével történik – azon berendezések esetében, ahol ez engedélyezve van. Ezt a WinCC runtime alól úgy vehetjük észre, hogy az egérrel az adott eszközre mutatva az kurzor megváltozik (egy zöld nyíl jellegűvé válik). Ebben az esetben a kezelői ablak a jobb egérgombbal előhívható. Ha a cursor nem változik, az adott eszköz ilyen módon való kezelése tiltott. A szelep ikonja a szabványrajzokban megismert módon jelenik meg. Az automatikus üzemmódot egy “A” betű, a kézit “M” betű jelzi az eszköz képe mellett. Hibás működés esetén sárga “S” betű villog szintén az eszköz mellett.
 segítségével történik – azon berendezések esetében, ahol ez engedélyezve van. Ezt a WinCC runtime alól úgy vehetjük észre, hogy az egérrel az adott eszközre mutatva az kurzor megváltozik (egy zöld nyíl jellegűvé válik). Ebben az esetben a kezelői ablak a jobb egérgombbal előhívható. Ha a cursor nem változik, az adott eszköz ilyen módon való kezelése tiltott. A szelep ikonja a szabványrajzokban megismert módon jelenik meg. Az automatikus üzemmódot egy A betű, a kézit M betű jelzi az eszköz képe mellett. Hibás működés esetén sárga S betű villog szintén az eszköz mellett.")
24
TAG Loging WinCC-be lehetőség van arra, hogy a tag-eket archiváljuk. Ebben az alkomponensben fel kell venni azokat a tag-eket amiket menteni szeretnénk. Minden tag-nel be kell állítani, hogy milyen időközönként készítsen róla archiválást. Ez az idő egység minimum egy szekundum lehet. Az archiválást lehet előre megadott időközönként de lehetőség van arra is, hogy saját magunk hozzunk létre archiválási ciklus időket. Lehetőség van arra a BOOL típusú változóknál, hogy akkor készítsen róla mentést, mikor megváltozik az értéke. Így az archivált adat mennyiségét jelentősen lehet csökkenteni. A rendszer az archiválást SQL adatbázisba végzi. Ezeknek az adatbázisoknak (szegmenseknek) meg kell adni a maximális nagyságát és azt, hogy mekkora lehet az összes szegmens maximális nagysága. Miután a rendszer elérte a maximális nagyságot, a legrégebbi archivot felülírja.
 meg kell adni a maximális nagyságát és azt, hogy mekkora lehet az összes szegmens maximális nagysága. Miután a rendszer elérte a maximális nagyságot, a legrégebbi archivot felülírja.")
25
Operátori jogosultságok
Mivel a SCADA rendszerből nem csak monitorozni lehet a technológiát, hanem működésbe be is lehet nyúlni, ezért a felhasználókat különböző jogosultságokkal kell felruházni. Azért, hogy olyan rendszerbe ne nyúlhasson bele, még véletlenül se, ami nem az ő hatásköre. WinCC-ben lehetőség van arra, hogy ezt teljes mértékig beállítsuk. Mivel minden egyes blokk ikonhoz hozzá rendelhető egy-egy jogosultsági szint. De akár a gyár részegységeit is összefogva fel lehet ruházni a megfelelő jogosultságokkal. Az ábrán megfigyelhető, hogy a „józsi” felhasználónak csak monitorozási joga van.

26
OS hardware RACK PC Rack szekrénybe szerelhető ipari kivitelű számítógép. Általában az operátor teremben, vagy a operátori számítógép teremben helyezkedik el. A számítógép hűtőventillátora elé cserélhető, tisztítható légszűrőt alkalmaznak, így az elektromos alkatrészek portól védhetők. A PC részegységei ipari előírásnak megfelelő megbízhatóságúak, így az ipari PC-k ára jelentősen meghaladja a hagyományos asztali számítógépekét.

27
OS hardware Panel PC Ipari kialakítású, pornak, rázkódásnak mechanikai igénybevételnek ellenálló számítógép. Az adatbevitel többnyire Touch Screen (érintő képernyő) segítségével történik. A számítógép rendelkezik az irányító rendszerhez történő csatlakozáshoz szükséges portokkal: ( Siemens esetében: Ethernet vagy ProfiNet, esetleg Profibus vagy MPI.) A panel pc beépítésre kerülhet a vezérlő szekrénybe, vagy saját konzollal elhelyezhető közvetlenül a technológia közelében is.
 segítségével történik. A számítógép rendelkezik az irányító rendszerhez történő csatlakozáshoz szükséges portokkal: ( Siemens esetében: Ethernet vagy ProfiNet, esetleg Profibus vagy MPI.) A panel pc beépítésre kerülhet a vezérlő szekrénybe, vagy saját konzollal elhelyezhető közvetlenül a technológia közelében is.")
28
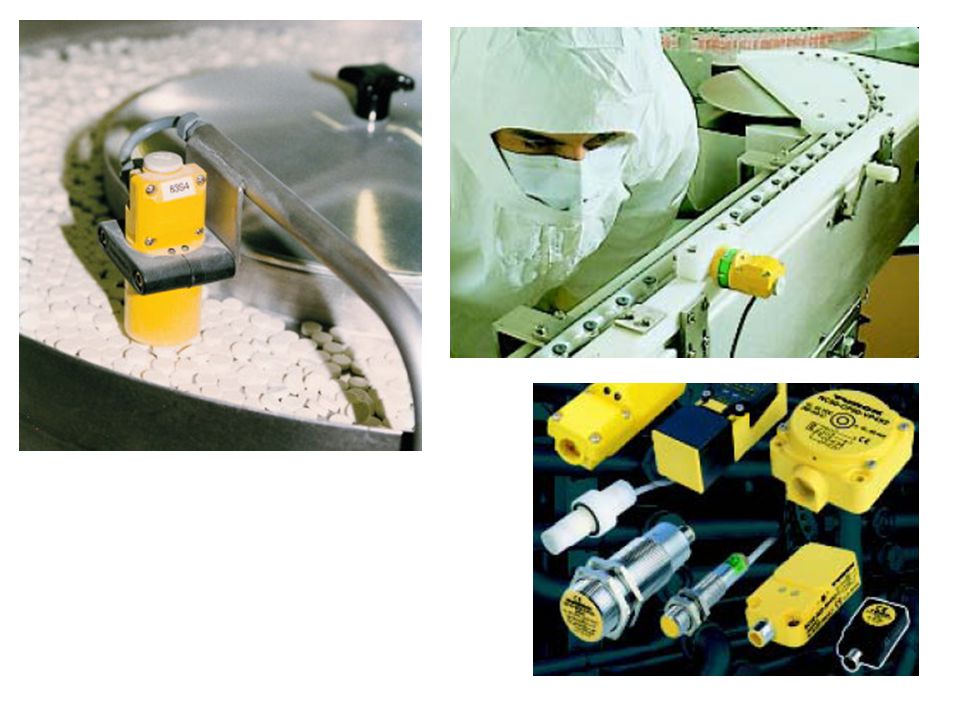
Szenzorok (Sensors)
")
29
Gyártás automatizálás
Folyamat automatizálás

30
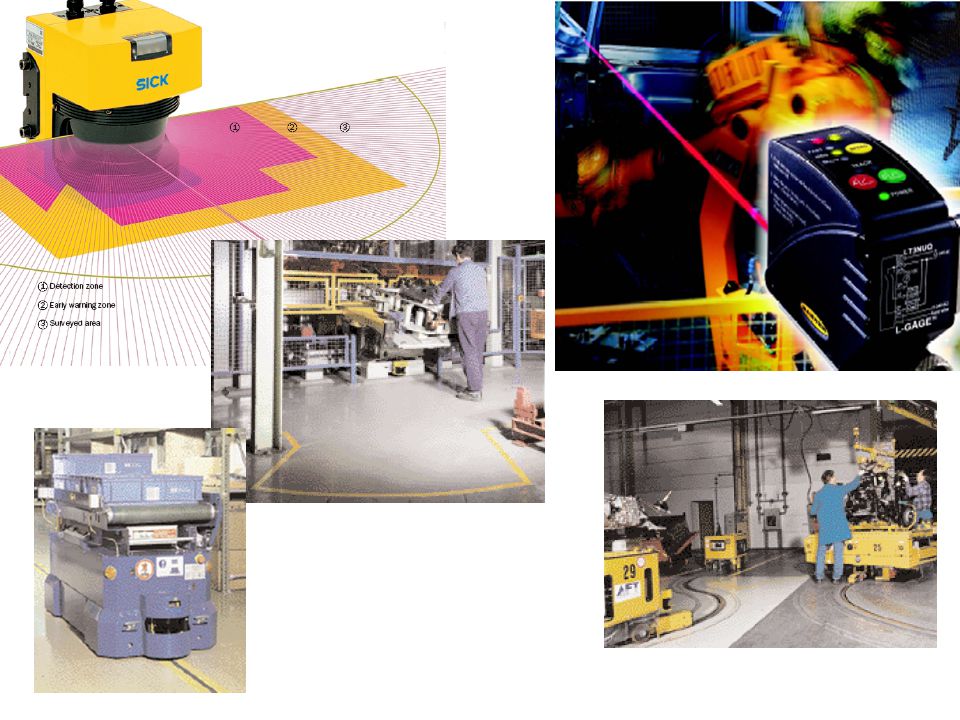
Szenzorok csoportosítása
Contact (szint kapcsolók) Non Contact (Inductive, Capacitive proximity sensors) Diszkrét Kimenetű (Szint kapcsolók, Fénysorompó) Analog Kimenetű (Hőmérséklet mérő,Ultrahangos távolságmérő, Nyomás mérő) Active (Jel kibocsátott) Passive (Nincs kibocsátott jel)
 Non Contact (Inductive, Capacitive proximity sensors) Diszkrét Kimenetű (Szint kapcsolók, Fénysorompó) Analog Kimenetű (Hőmérséklet mérő,Ultrahangos távolságmérő, Nyomás mérő) Active (Jel kibocsátott) Passive (Nincs kibocsátott jel)")
31
Végállás kapcsoló

32
Inductive közelítés kapcsoló
Az induktív érzékelő fém tárgyak kontaktus nélküli érzékelésére lett kifejlesztve. Az érzékelés egy nagyfrekvenciával gerjesztett tekercs által létrehozott mágneses tér változásának figyelésével történik.

33
Mágneses tér érzékelő szenzorok (Hall-szenzorok)
- Magas műveleti sebesség - Tág hőmérséklet tartomány - Kontaktusmentes - Passzív Ha egy félvezető lapkán áram folyik keresztül és a lapkát rá merőleges mágneses térbe helyezik, az áram folyására merőleges irányban a lapkán feszültség keletkezik. Ez a feszültség a Hall feszültség és a fizikai hatást hívják Hall effektusnak.

35
Kapacitív közelítés érzékelő
A kapacitív érzékelő tetszőleges anyagú kontaktusmentes érzékelésére lett kifejlesztve. Az érzékelés egy nagyfrekvenciával gerjesztett kapacitás dielektrikumának változásának figyelésével történik.

37
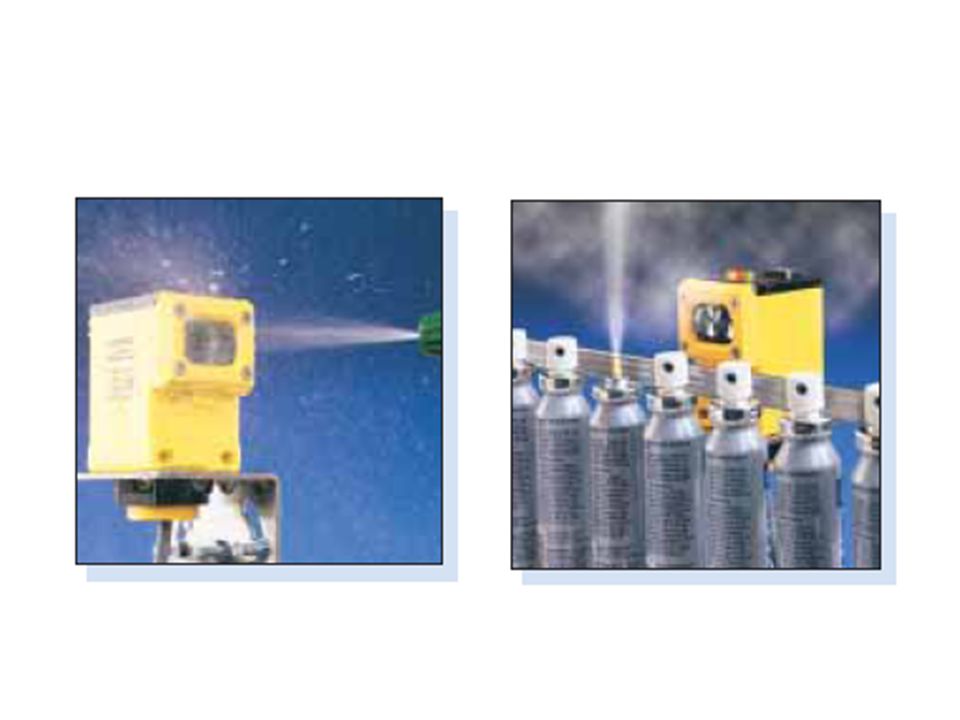
Fénysorompó, reflexiós fénysorompó

38
Triangulation Sensor Háromszögelés elven alapuló távolságmérés

39
3D Triangulation Sensor

41
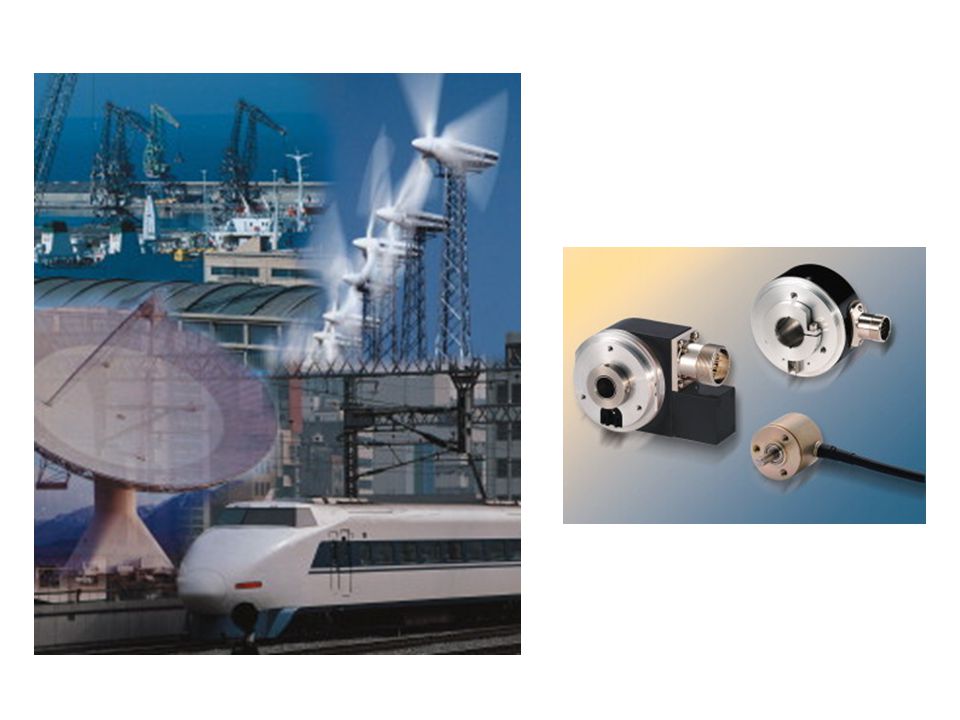
Inkrementális optikai encoder Elfordulás érzékelő

42
Absolute Rotary Encoder

44
Futási idő mérésén alapuló távolságmérés
A mérés során kibocsátott jelcsomag céltárgyról történő visszaverődése utáni, visszaérkezés és a kibocsátás között eltelt időt mérjük, ismerve a jelcsomag terjedési sebességét, a távolság számÍtható. A kibocsátott jel lehet hang, fény, vagy elektromágnesen sugárzás. Amennyiben a kibocsátott jel, hanghullám, a terjedési sebesség: 342m/s, tehát a terjedési idő, egy 3 méterre lévő visszaverő tárgy esetén 20 ms. Ha a kibocsátott jel, egy lézersugár, a terjedési sebesség: 3 x 108 m/s ami 106-szor gyorsabb, mint a hang esetében. A futási idő ebben az esetben: 20ns! Ha a mérendő távolság kicsi, a nagy terjedési sebesség miatt a pontos mérés bonyolult és költséges. Hanggal történő mérés esetén azonban sokszor pont a lassú terjedésből adódó lassú mérés okoz problémát.

45
Ultrahangos távolságmérés

47
Lézeres távolságmérés

49
Sebesség és gyorsulás mérés

50
Gyorsulás mérés

51
Nyomás mérő szenzorok Absolute nyomás mérő Az abszolult nulla nyomáshoz viszonyított nyomás mérése. Nyomás különbség mérő Két nyomás közötti különbség mérése. Negative nyomás mérő Vákuum mérése. Gauge nyomás mérő A környezeti nyomás és a mérendő nyomás különbségének összehasonlítása.

52
Dugattyús nyomásmérő

53
Burdon csöves nyomásmérő
A Burdon cső egy olyan meghajlított, egyik végén zárt rugalmas cső, amely a másik végén betáplált nyomás hatására igyekszik kiegyenesedni. Az elmozdulás mérésével, a nem-linearitásokat kompenzálva, a nyomás mérhető

54
(Bellows) This sensor uses a small metal bellows to convert pressure into linear motion. As the pressure inside increases, the bellows expand against the resistance of a spring (the spring is often the bellows itself). This motion is detected with a position sensor such as a pot.
. This motion is detected with a position sensor such as a pot.")
55
Nyomás mérés piezo-kristály segítségével
Egy vékony, rugalmas filmre nagy sűrűségű piezo-kristályos vezetőanyagot visznek föl. Nyomás hatására a film deformálódik, így a vezető anyag kristályszerkezete megváltozik, ezzel változik a vezető anyag ellenállása. Az ellenállás változás arányos a nyomással.

57
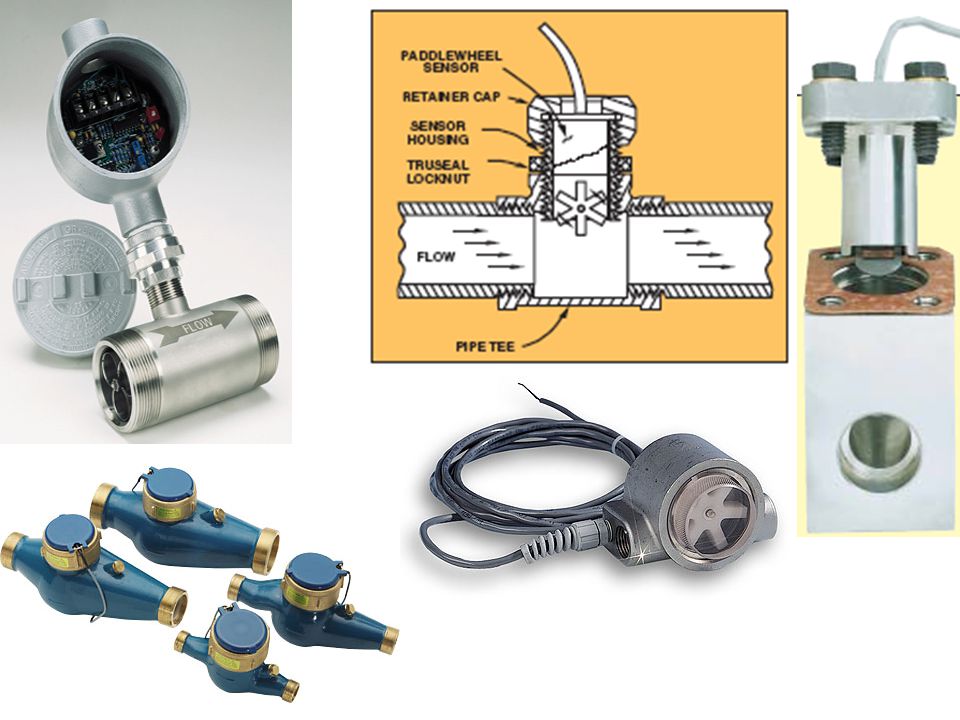
Áramlásmérők Az áramlásmérő azt az anyagtérfogatot méri, amely a szenzoron áthalad egységnyi idő alatt. A mérendő anyag lehet: Folyadék Gáz Vezető Nemvezető Szennyezett Szennyezés mentes

58
Mechanikus áramlásmérők

60
Nyomásmérési elven működő áramlásmérők
Pressure sensors are often used to measure fluid flow. The faster the fluid is flowing, the more pressure it will create in the open end of the pitot type flow meter. Pressure upstream from a restricted orifice in a pipe is always higher than pressure downstream from that restriction. The greater the flow rate, the greater the pressure difference, so if a differential pressure sensor compares pressures before and after the restriction, then flow rate can be determined. The restriction orifice required by such a sensor reduces the flow.

61
Elektromágneses áramlás mérés
The operation of a magnetic flowmeter or mag meter is based upon Faraday's Law, which states that the voltage induced across any conductor as it moves at right angles through a magnetic field is proportional to the velocity of that conductor. fluid being measured must be electrically conductive No pressure loss No moving parts ~3000Euro

62
Ultrahangos áramlásmérés
Az áramlásmérés során a szenzor egy ultrahangos hullámcsomagot bocsát ki, mely az áramló közegben található szilárd részecskékről, szennyeződésekről visszaverődik. A kibocsátott és visszavert hullámcsomag frekvenciája a Doppler hatás következtében eltér, az eltérés arányos az áramló közeg sebességével. A mérés hatékonyan alkalmazható szennyezett közegek mérésénél (szennyvíz kezelés), azonban nem alkalmas tiszta folyadékok és gázok áramlásának mérésére.
, azonban nem alkalmas tiszta folyadékok és gázok áramlásának mérésére.")
64
Rotaméter A rotaméter egy belűről kúposan kialakított csőből és a csőben elhelyezett úszóból áll. A cső függőlegesen kerül elhelyezésre, alaphelyzetben az úszó a cső aljára szorul. Áramlás hatására az áramló közeg megemeli az úszót, Az úszó kezdeti ponttól vett magassága arányos az áramlással. A cső jellemzően üvegből, kalibrált kialakítással készül.

65
Hőmérséklet érzékelők
positive temperature coefficient - A szenzor kimeneti jele arányos a hőmérséklettel negative temperature coefficient - A szenzor kimeneti jele fordítottan arányos a hőmérséklettel

66
Bimetallic Temperature Sensors
Különböző anyagok hőtágulási eggyütthatója eltérő, így ha két eltérő anyagot egymáshoz rögzítünk, hő hatására elhajlanak. Ez az elmozdulás alakítható elektromos jellé, vagy használható egy kontaktus nyitásához vagy zárásához.

67
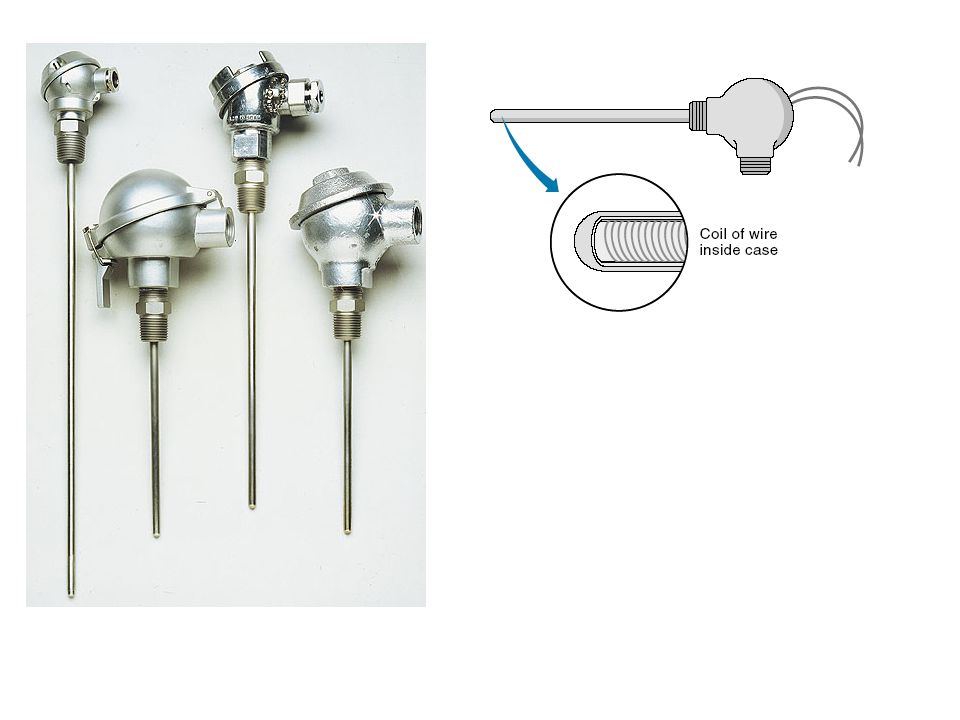
Ellenállás hőmérő Resistance Temperature Detector (RTD)
A fémek hőmérséklet hatására változtatják ellenállásukat. A platina hőmérsékleti eggyütthatója: Ω/Ω/°C, theát az ellenállás egy hőmérsékletnyi változás hatására Ω növekedést mutat minden 1 ohmra eső vezető esetén. Gyakran használt típusok: PT100, PT1000 (ez platina RTD-t jelent 100 és 1000 ohmos kialakításban) PT100 ás hőmérő esetén 0.39Ω ellenállás-változás tartozik egy fok hőmérséklet változáshoz.
 PT100 ás hőmérő esetén 0.39Ω ellenállás-változás tartozik egy fok hőmérséklet változáshoz.")
69
Hőelem Két eltérő fém között úgynevezett termo-feszültség generálódik, mely arányos a hőmérséklettel (Seebeck effect).
.")
70
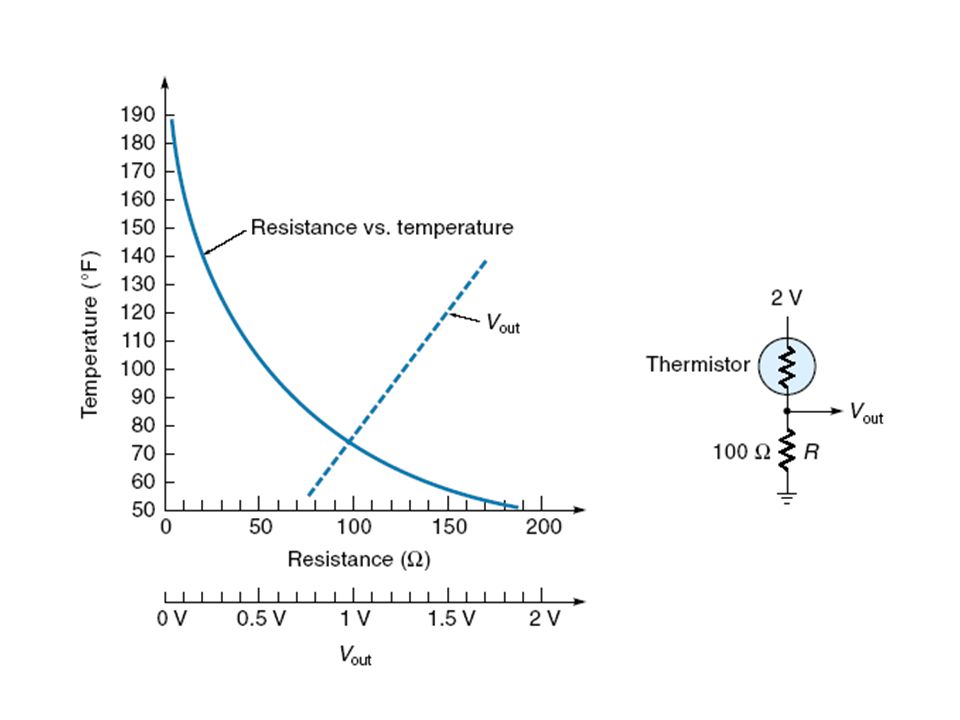
Thermistor A kereskedelemben készen kaphatók hőmérséklet-érzékeny félvezető ellenállások, a termisztorok. Anyagukat tekintve nehézfém-oxidokból készült kerámiák, ellenállásuk hőmérsékleti tényezője általában nagyobb, mint a fémeké. A termisztorok két csoportba oszthatók: - negatív hőmérsékleti együtthatójú ellenállások (NTK-ellenállások), - pozitív hőmérsékleti együtthatójú ellenállások (PTK-ellenállások).
, - pozitív hőmérsékleti együtthatójú ellenállások (PTK-ellenállások).")
72
Szint érzékelés lehetőségei

73
Analóg kimenetű szintmérők

74
Beavatkozók (Actuators)
")
75
Beavatkozók a szabályzási körben

76
Beavatkozók csoportosítása
Müködtető energia szerint: Elektromos Pneumatukus Hidraulikus A keletkező mozgás szerint: Forgó mozgás Egyenes vonalú mozgás

77
DC motor

78
DC motor

79
Szénkefe nélküli motor (BLDC)
")
80
Szénkefe nélküli motor (BLDC)
")
81
Motorok jellemző karakterisztikái

82
AC Motor

83
Frekvenciaváltók

84
Lágyindítók Null-átmenet figyelése. A motor bekapcsolása akkor történik amikor a váltófeszültség a 0-potenciálon van. Így a bekapcsoláskor az induktív terhelés káros hatása nem érvényesül

85
Áttételezés

86
Mozgás átalakítók Forgó mozgásból forgó mozgást (Áttétel)
Forgóból lineáris mozgás (orsós hajtás) Lineárisból forgót (Hydraulikus munkahengerrel működtetett csavarás) Lineárisból lineárist (Kétkarú emelő) Törekedni kell a minél kisebb súlyra és a nagyobb nyomatékra
 Lineárisból forgót (Hydraulikus munkahengerrel működtetett csavarás) Lineárisból lineárist (Kétkarú emelő) Törekedni kell a minél kisebb súlyra és a nagyobb nyomatékra.")
87
Fogaskerék áttétel

88
Hullámhajtómű Az ábrán látható hullámhajtómű három fő alkatrésze a hullámgenerátor (kék), a hullámkerék (fekete) és a gyűrűkerék (piros) A hullámgenerátort tekintsük most egy ovális acéltengelynek, a hullámkereket egy gumiból készült külsőfogazású keréknek, a gyűrűkereket pedig egy fixen rögzített acél belsőfogazású keréknek, melynek fogszáma esetünkben kettővel nagyobb mint a hullámkeréké. A hajtómű bemenete a hullámgenerátor. Ahogy forgatjuk a hullámgenerátort, az a hullámkerék fogait sorba belepréseli a gyűrűkerék fogai közé. Mivel a hullámkerék fogszáma (esetünkben) kettővel kisebb, mint a gyűrűkeréké, nyilvánvaló, hogy a hullámgenerátor egyszeri körbefordulásának eredményeképpen a hullámkerék 2 fognyit elfordul. A hajtásunk kimenete a hullámkerék. A be- és kimenet forgásiránya ellentétes, az áttétel pedig a hullámkerék fogszámának és a fogszám-különbségnek a ... függvénye.
, a hullámkerék (fekete) és a gyűrűkerék (piros) A hullámgenerátort tekintsük most egy ovális acéltengelynek, a hullámkereket egy gumiból készült külsőfogazású keréknek, a gyűrűkereket pedig egy fixen rögzített acél belsőfogazású keréknek, melynek fogszáma esetünkben kettővel nagyobb mint a hullámkeréké. A hajtómű bemenete a hullámgenerátor. Ahogy forgatjuk a hullámgenerátort, az a hullámkerék fogait sorba belepréseli a gyűrűkerék fogai közé. Mivel a hullámkerék fogszáma (esetünkben) kettővel kisebb, mint a gyűrűkeréké, nyilvánvaló, hogy a hullámgenerátor egyszeri körbefordulásának eredményeképpen a hullámkerék 2 fognyit elfordul. A hajtásunk kimenete a hullámkerék. A be- és kimenet forgásiránya ellentétes, az áttétel pedig a hullámkerék fogszámának és a fogszám-különbségnek a ... függvénye.")
89
Planetary gear

90
Csigahajtás és helikális fogaskerék hajtás

91
Lineáris mozgás előállítása menetes orsóval

92
Lineáris mozgás előállítása fogasléccel

93
Fékek (Break)
")
94
Léptető Motor

95
Típus Előny Hátrány Vezérlés Aszinkron AC - Olcsó - Egyszerű felépítésű - Nagy teljesítményű - Hosszú élettartam - A fordulatszám eltér a gerjesztő frekvenciától - Alacsony indító nyomaték - Inverter Szinkron AC - A fordulatszám szinkronban van a gerjesztő frekvenciával - Drága Léptetőmotor - Precíz pozicionálás egy fordulaton belül - Magas tartónyomaték - Lassú - Többfázisú DC - Többfázisú PWM Szénkefe nélküli DC - Jó hatásfok - Bonyolult szabályzás Szénkefés DC - Egyszerűen szabályozható - Alacsony élettartam - Karbantartási igény - Közvetlen PWM

96
Lineáris Motor

97
Hidraulikus beavatkozók

98
Hidraulikus fogaskerék szivattyú

99
Hidraulikus beavatkozó rendszer

100
Pneumatikus beavatkozó

101
Dugattyús kompresszor

102
Pneumatikus szürő és szárító

103
Nyomás csökkentő

104
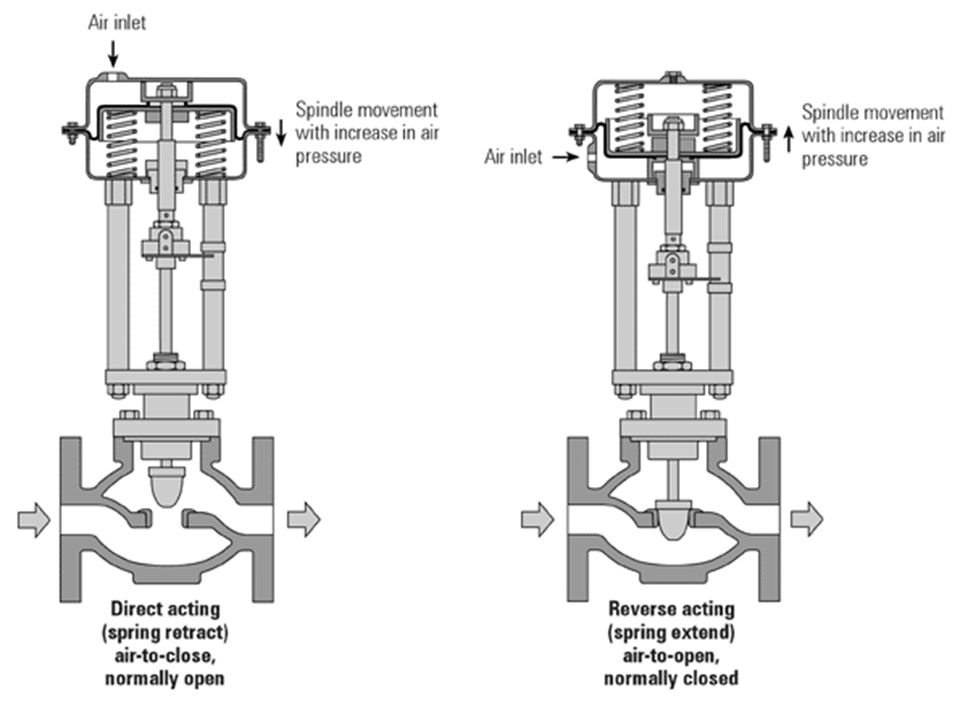
Pneumatikus szabályzó szelep

105
Pneumatikus munkahenger

106
Forgató pneumatikus munkahenger

107
Szabályozó szelep

108
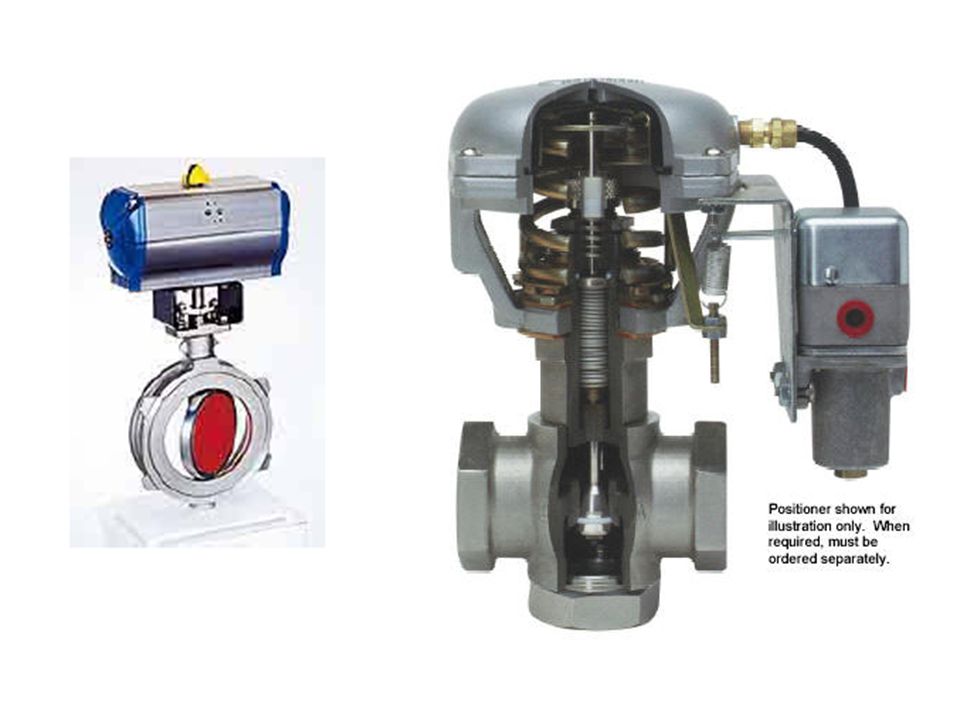
Pneumatikus helyzetbeállító

110
Szabályozott pneumatikus helyzetbeállító

111
Dugattyús helyzetbeállító

113
Pillangó szelep

114
IP Classification Codes

115
Degrees of Protection (Foreign Bodies) – 1st Digit
 – 1st Digit")
116
Degrees of Protection (Moisture) – 2nd Digit
 – 2nd Digit")
Hasonló előadás




 a televíziókhoz hasonló számítógép- képernyő vagy monitor. A monitort egy kábel köti.>")


















