Előadást letölteni
Az előadás letöltése folymat van. Kérjük, várjon

1
KÖSZÖNTJÜK HALLGATÓINKAT! Önök Kóczy László Intelligens informatikai modelek és alkalmazásuk c. előadását hallhatják! 2010.Szeptember 8.

2
Tartalom Fuzzy modelek és alkalmazásuk 1.Klasszikus fuzzy szabálybázisos modelek 2.I nterpol ációs szabálybázisok 3.Hierarchi kus fuzzy szabálybázisok 4.Hierarchi kus fuzzy szabálybázisok interpolációja

3
1. Klasszikus fuzzy szabályalapú modellek

4
A homokkupac-paradoxon...

5
Egy példa A hallgatóság (E.G. M.Sc. Students taking „Fuzzy Theory”) Az univerzum : X “Kinek van jopgositványa?” A subset of X = A (Crisp) Set (X) = karakterisztikus függvény “Ki a jó autóvezető?” (X) = tagsági függvény 1 0 1 1 0 1 1 0.7 0 1.00.8 0 0.4 0.2 FUZZY halmaz
 Az univerzum : X Kinek van jopgositványa A subset of X = A (Crisp) Set (X) = karakterisztikus függvény Ki a jó autóvezető (X) = tagsági függvény FUZZY halmaz.")
6
A fuzzy elmélet története Fuzzy sets & logic: Zadeh 1964/1965- Fuzzy algorithm: Zadeh 1968-(1973)- Fuzzy control by linguistic rules: Mamdani & Al. ~1975- Industrial applications: Japan 1987- (Fuzzy boom), Korea Home electronics Vehicle control Process control Pattern recognition & image processing Expert systems Military systems (USA ~1990-) Space research Applications to very complex control problems: Japan (Sugeno) 1991- E.G. helicopter autopilot
, Korea Home electronics Vehicle control Process control Pattern recognition & image processing Expert systems Military systems (USA ~1990-) Space research Applications to very complex control problems: Japan (Sugeno) E.G. helicopter autopilot.")
7
Degree of matching unit Fuzzy inference engine Defuzzification module Fuzzy rule base Fuzzy rendszer általános vázlata Observation Action

8
IF x = A THEN y = B A is the rule antecedent, B is the rule consequent Example: „IF traffic is heavy in this direction THEN keep the green light longer” Fuzzy rule base relation R containing two fuzzy rules A 1 → B 1, A 2 → B 2 (R 1, R 2 ) If x = A then y = B "fuzzy point" A×B If x = A i then y = B i i = 1,...,r "fuzzy graph" Fuzzy rule = fuzzy relation (R i ) Fuzzy rule base = fuzzy relation (R), is the union (s-norm) of the fuzzy rule relations R i : Nyelvi szabályok
 If x = A then y = B fuzzy point A×B If x = A i then y = B i i = 1,...,r fuzzy graph Fuzzy rule = fuzzy relation (R i ) Fuzzy rule base = fuzzy relation (R), is the union (s-norm) of the fuzzy rule relations R i : Nyelvi szabályok")
9
Fuzzy szabályalapú kapcsolat more dimensional case:

10
Fuzzy következtető mechanizmus (Mamdani) If x 1 = A 1,i and x 2 = A 2,i and...and x n = A n,i then y = B i The weighting factor w ji characterizes, how far the input x j corresponds to the rule antecedent fuzzy set A j,i in one dimension The weighting factor w i characterizes, how far the input x fulfils to the antecedents of the rule R i.
 If x 1 = A 1,i and x 2 = A 2,i and...and x n = A n,i then y = B i The weighting factor w ji characterizes, how far the input x j corresponds to the rule antecedent fuzzy set A j,i in one dimension The weighting factor w i characterizes, how far the input x fulfils to the antecedents of the rule R i.")
11
Következtetés The conclusion of rule R i for a given x observation is y i

12
A teljes következtési séma

13
Fuzzy rendszerek: példa Fuzzy systems operate on fuzzy rules: IF temperature is COLD THEN motor_speed is LOW IF temperature is WARM THEN motor_speed is MEDIUM IF temperature is HOT THEN motor_speed is HIGH TEMPERATUREMOTOR_SPEED

14
Következtető mechanizmus (Mamdani) Temperature = 55Motor Speed Motor Speed = 43.6 RULE 1 RULE 2 RULE 3
 Temperature = 55Motor Speed Motor Speed = 43.6 RULE 1 RULE 2 RULE 3")
15
Példa: Hernyótalpas jármű irányítása (M.Sc. hallgatói csoport, Pápai et al. ) Kis „Marsjáró” jármű, amelyik tereplemezen mozog Rögzitett alapállomás és mozgó jármű Alapja egy játéktank Irányitója asztali PC, amelyen C#.NET s z oftware fut A járművet Mamdani fuzzy irányitó vezérli, útkeresés és akadáykerülés szintjén is
 Kis „Marsjáró jármű, amelyik tereplemezen mozog Rögzitett alapállomás és mozgó jármű Alapja egy játéktank Irányitója asztali PC, amelyen C#.NET s z oftware fut A járművet Mamdani fuzzy irányitó vezérli, útkeresés és akadáykerülés szintjén is.")
16
Szimulátor kisérlet

17
A mozgó egység

18
Tesztelés

19
A verseny

20
Egy másik példa: Vasúti menetrendi eltérésekből adódó problémák feloldása Africon 2009, Héray, Rózsa et al. Az állomás

21
A vizsgált vonatok menetrendi adatai

22
A csatlakozási probléma paramétereinek tapasztalt értékei CT – connections time ID – incoming delay OD – outcoming delay

23
A konfliktust feloldó szabálybázis Level 1

24
A konfliktust feloldó szabálybázis Level 2

25
2. Szabályinterpoláció (közös kutatás, Dr. h. c. Prof. Hirota K., Hosei U. & TIT; M.Sc. és Ph. D. projektek)
.")
26
„A dimenziószám átka” a fuzzy irányitásban If there are k input state variables, and in each there are (max) T terms, the number of rules covering the space densely is How to decrease this expression? 1.Decrease T Sparse rule bases, rule interpolation (Kóczy and Hirota, 1990) 2.Decrease k Hierarchical structured rule bases (Sugeno, 1991) 3.Decrease both T and k Interpolation of hierarchical rule bases (Kóczy and Hirota, 1993)
 2.Decrease k Hierarchical structured rule bases (Sugeno, 1991) 3.Decrease both T and k Interpolation of hierarchical rule bases (Kóczy and Hirota, 1993).")
27
T csökkentése FUZZY CRI/ MAMDANI CONTROL SYMBOLIC EXPERT CONROL FUZZY INTERPOLATIVE CONTROL

28
T csökkentése érett éretlen ??? (sárga)
")
29
A line á r is interpol áció alapegyenlete és ennek megoldása B* -ra where

30
X1X1 T1T1 T2T2 T3T3 T1T1 T2T2 T3T3 x*x* X1X1 Döntési fa

31
T2T2 x*x* X1X1 T1T1 T3T3 Fundamental Equation of Fuzzy Interpolation Egy „nemlétező” ágon kell haladni

32
Szabály interpol áció Interpolation between different points x f(x) Interpolation of fuzzy rules Duration of green light: Traffic intensity „Long” „Short” „Middle” „weak” „Heavy”„Average” 1 1
 Interpolation of fuzzy rules Duration of green light: Traffic intensity „Long „Short „Middle „weak „Heavy „Average 1 1")
33
A lineáris interpolációs módszer eredménye nem mindig értelmes

34
Példa abnormális eredményre

35
Módositott interpoláció – az előző példa helyes megoldása

36
Egy újabb példa: Nyomkövetés automata targoncával (AGV) ( Ph. D., Kovács ) e v : the distance between the guide path and the guide point : the estimated momentary path tracking error V L is the contour speed of the left wheel V R is the contour speed of the right wheel Speed: V a =(V L +V R )/2 Steering: V d =V L -V R Rules describing the steering (V d ): If e v = A 1,i and = A 2,i then V d = B i Rules describing the speed (V a ): If e v = A 1,i and = A 2,i then V d = B i An example rule: If the distance between the guide path and the guide point (e v ) is Positive Middle and estimated path tracking error ( ) is Negative Middle then the steering (V d ) is Zero and the speed (V a ) is Middle
 e v : the distance between the guide path and the guide point : the estimated momentary path tracking error V L is the contour speed of the left wheel V R is the contour speed of the right wheel Speed: V a =(V L +V R )/2 Steering: V d =V L -V R Rules describing the steering (V d ): If e v = A 1,i and = A 2,i then V d = B i Rules describing the speed (V a ): If e v = A 1,i and = A 2,i then V d = B i An example rule: If the distance between the guide path and the guide point (e v ) is Positive Middle and estimated path tracking error ( ) is Negative Middle then the steering (V d ) is Zero and the speed (V a ) is Middle.")
37
Nyomkövetés automata targoncával (AGV) ( folytatás) Fuzzy partitions for the linguistic variables: evev VdVd VaVa
 ( folytatás) Fuzzy partitions for the linguistic variables: evev VdVd VaVa ")
38
evev VdVd VaVa e v NLNMZPMPL NL NM Z PM PL NS PL PS NS NL PS NL e v NLNMZPMPL NL NM Z PM PL SZSZ L ZSZS VdVd VaVa e v NLNMZPMPL NL NM Z PM PL NS PL PS NS NL PS NL e v NLNMZPMPL NL NM Z PM PL SZSZ L ZSZS VdVd VaVa Komoly redukció a szabályszámban

39
3. Hierarchi kus fuzzy szabálybázisok

40
„A dimenziószám átka” a fuzzy irányitásban If there are k input state variables, and in each there are (max) T terms, the number of rules covering the space densely is How to decrease this expression? 1.Decrease T Sparse rule bases, rule interpolation (Kóczy and Hirota, 1990) 2.Decrease k Hierarchical structured rule bases (Sugeno, 1991) 3.Decrease both T and k Interpolation of hierarchical rule bases (Kóczy and Hirota, 1993)
 2.Decrease k Hierarchical structured rule bases (Sugeno, 1991) 3.Decrease both T and k Interpolation of hierarchical rule bases (Kóczy and Hirota, 1993).")
41
Hogyan csökkenthető k ténylegesen? ”Divide and conquer” algorithms/ Sugeno’s helicopter Hierarchically structured rule bases with locally reduced variable sets State space: Partitioned subspace: In : In each D i a sub-rule base R i is defined, reduction works if in each sub-rule base the input variable space X i is a sub-space of

42
Sugeno fuzzy helikoptere

43
Hierarchikus fuzzy szabálybázis In these cases complexity is still O(T k ), as the size of R 0 is O(T k 1 ) and each R i, i > 0, is of order O(T k-k 1 ), so O(T k 1 ) × O(T k-k 1 )=O(T k ) In some concrete applications: In each D i a proper subset of can be found so that each R i contains only k i < k – k 0 input variables if then the resulting complexity will be, Often it is impossible to find so that k i < k – k 0, i=1,…,n because such a partition does not exist.
, as the size of R 0 is O(T k 1 ) and each R i, i > 0, is of order O(T k-k 1 ), so O(T k 1 ) × O(T k-k 1 )=O(T k ) In some concrete applications: In each D i a proper subset of can be found so that each R i contains only k i < k – k 0 input variables if then the resulting complexity will be, Often it is impossible to find so that k i < k – k 0, i=1,…,n because such a partition does not exist.")
44
A döntési tér (Z 0 ) felosztása X1X1 X2X2 D1D1 Z0Z0 D2D2 D3D3
 felosztása X1X1 X2X2 D1D1 Z0Z0 D2D2 D3D3")
45
A hierarchikus szabálybázis csökkentése If z 0 is D 1 then use R 1 If z 0 is D 2 then use R 2 … If z 0 is D n then use R n If z 1 ’ is A 11 then y is B 11 If z 1 ’ is A 12 then y is B 12 … If z 1 ’ is then y is

46
A hierarchikus szabálybázis csökkentése (folyt. ) If z 2 ’ is A 21 then y is B 21 If z 2 ’ is A 22 then y is B 22 … If z 2 ’ is then y is … … … If z n ’ is A n1 then y is B n1 If z n ’ is A n2 then y is B n2 … If z n ’ is then y is
 If z 2 ’ is A 21 then y is B 21 If z 2 ’ is A 22 then y is B 22 … If z 2 ’ is then y is … … … If z n ’ is A n1 then y is B n1 If z n ’ is A n2 then y is B n2 … If z n ’ is then y is.")
47
Hierarchikus döntés LEVEL 0 LEVEL 1 X 1 …X i X j1 …X jk1 X j2 …X jk2 X ji …X jki … j 1 …j k1, j 2 …j k2, …, j i …j ki

48
4. Interpoláció a hierarchikus szabálybázisban

49
„A dimenziószám átka” a fuzzy irányitásban If there are k input state variables, and in each there are (max) T terms, the number of rules covering the space densely is How to decrease this expression? 1.Decrease T Sparse rule bases, rule interpolation (Kóczy and Hirota, 1990) 2.Decrease k Hierarchical structured rule bases (Sugeno, 1991) 3.Decrease both T and k Interpolation of hierarchical rule bases (Kóczy and Hirota, 1993)
 2.Decrease k Hierarchical structured rule bases (Sugeno, 1991) 3.Decrease both T and k Interpolation of hierarchical rule bases (Kóczy and Hirota, 1993).")
50
PROBL É M A (i) Partition usually does not exist because it is not possible to separate the areas of influence for the subsets of variables ”Sparse partition” X1X1 X2X2 D1D1 Z0Z0 D2D2 D3D3
 Partition usually does not exist because it is not possible to separate the areas of influence for the subsets of variables Sparse partition X1X1 X2X2 D1D1 Z0Z0 D2D2 D3D3")
51
PROBL ÉMA (iia) The elements of partition are usually not crisp sets as the influence of each variable subset is fading away gradually when getting farther from the core ”Fuzzy partition” X1X1 X2X2 D1D1 Z0Z0 D2D2 D3D3
 The elements of partition are usually not crisp sets as the influence of each variable subset is fading away gradually when getting farther from the core Fuzzy partition X1X1 X2X2 D1D1 Z0Z0 D2D2 D3D3")
52
PROBL ÉMA (ii) The elements of partition are usually not crisp sets as the influence of each variable subset is fading away gradually when getting farther from the core ”Fuzzy partition” X1X1 X2X2 D1D1 Z0Z0 D2D2 D3D3
 The elements of partition are usually not crisp sets as the influence of each variable subset is fading away gradually when getting farther from the core Fuzzy partition X1X1 X2X2 D1D1 Z0Z0 D2D2 D3D3")
53
E.G.: X 1 =3 3 X 2 =5 Problems: No disjoint classes of X 1 can be distinguished Fuzzy values for X 1 are known How to resolve this? ? ?

54
A hierarchikus interpoláció ábrája Interpolation of rules + rule bases Possibly different subsets of variables

55
Interpoláció a hierarchikus szabálybázisban Algorithm: 1.Determine the projection of the observation to the subspace of the fuzzy partition Find the flanking elements in 2.Determine the degrees of similarity (reciprocal distances or dissimilarities) for each in These will be w i. 3.For each R i, where w i 0, determine A * i the projection of A * to Z i. Find the flanking elements in each R i. 4. Determine the sub-conclusions B * for each sub-rule base R i. Replace the sub-rule bases by the sub-conclusions in the meta-rule base R 0 and calculate the final conclusion B * by applying w i as degrees of similarity.

56
Interpoláció a hierarchikus szabálybázisban példa R 0 If z 0 is D 1 then use R 1 If z 0 is D 2 then use R 2 R R 1 If z 1 is A 11 then y is B 11 If z 1 is A 12 then y is B 12 R 2 If z 2 is A 21 then y is B 21 If z 2 is A 22 then y is B 22

57
Alkalmazások Intelligent s t ávközlési felügyeleti rendszer (LiNECom Ltd., supported by Ministry of Education, ~EUR 450.000) Internet es álláskereső és kináló rendszer (Solware Ltd., supported by Ministry of Education ~EUR 170.000) Intelligen s közlekedési lámpairányitó rendszer, egyszerű kereszteződés, úthálózatok
 Internet es álláskereső és kináló rendszer (Solware Ltd., supported by Ministry of Education ~EUR ) Intelligen s közlekedési lámpairányitó rendszer, egyszerű kereszteződés, úthálózatok")
58
Intelligen s időjárásfigyelő alkalmazás ( Mobil távközlés- felügyelet - Linecom Ltd.)
")
59
Rendszerstruktúra Intelligent Components

60
Intelligen s álláskereső (Solware Ltd.) Arbitrary variety of hierarchically structured features is possible Degree of relevance, importance can be given by number or pictorial representation Various fuzzy connectives can be used for combination Verbal input is transformed into fuzzy membership functions
 Arbitrary variety of hierarchically structured features is possible Degree of relevance, importance can be given by number or pictorial representation Various fuzzy connectives can be used for combination Verbal input is transformed into fuzzy membership functions")
61
Példa “At least HUF 300.000/month expected” 300.000

62
Példa Applicant for job has zip code 96xx Job location has zip code 111x Győr Budapest Motorway M1 ~1h 20’ ~0-15’ ~0-20’ 1h 20’- 1h 55’ = “quite far but daily commuting is possible”

63
Forgalomirányitás Detecting traffic situation with sensors (e.g. camera, inductive loop) Determining proper action suitable for the traffic situation handling using available information Intervene using traffic lights or other tools
 Determining proper action suitable for the traffic situation handling using available information Intervene using traffic lights or other tools.")
64
A szituáció

65
Első változat

66
Különböző esetek Road intersection complex intersection different lanes by direction Road railroad intersection railroad has always priority High railroad traffic (suburb situations) More, connected intersections very complex situations importance of using interpolative and hierarchical methods
 More, connected intersections very complex situations importance of using interpolative and hierarchical methods")
67
A hagyományos és a fuzzy irányitás összevetése with high traffic distributed equally in the different directions if the traffic is large in one particular direction Maximum length of queues Maximum waiting time

68
Forgalomszimulátor ( második verzió, M.Sc. Project, Hajdú) Graph based roadnetwork model Cellular automaton based road segments Online changeable traffic control per junction O-D matrix based traffic generation Maps stored in XML format Graphical User Interface Scriptable scenarios for programmed simulations Data visualization online or offline with JFreeChart
 Graph based roadnetwork model Cellular automaton based road segments Online changeable traffic control per junction O-D matrix based traffic generation Maps stored in XML format Graphical User Interface Scriptable scenarios for programmed simulations Data visualization online or offline with JFreeChart.")
70
Problems Local information is not sufficient Detecting traffic congestion Creating green waves is a target Priority handling (vehicles, routes) Handling of the pedestrian traffic lights Utilizing the timing component of the traffic control
 Handling of the pedestrian traffic lights Utilizing the timing component of the traffic control")
71
Effects of the sorrounding junctions Traffic light's importance is affected by nearby traffic lights' traffic Adjacent junctions share information with communication

72
Egy érdekes és komplex alkalmazás Intelligens robotok kontextusfüggő fuzzy kommunikációja (Gedeon, ANU és Ph. D. téma, Ballagi ) Emberek közötti kommunikáció Kevés informécióból sok minden rekonstruálható Hasznos lehet ennek a kiterjesztése ember-gép és gépek közötti kommunikációra is
 Emberek közötti kommunikáció Kevés informécióból sok minden rekonstruálható Hasznos lehet ennek a kiterjesztése ember-gép és gépek közötti kommunikációra is.")
73
Mi a fuzzy kommunikáció? Ellentmondó értelmezések : –A pontos információk hiánya: akár katasztrofális félreértések – LIFE: használjunk fuzzy elemeket a hatékony és gyors kommunikáció céljából

74
Negative példa (The University of Montana Rural Institute, Flaherty ) Ernie, az új igazgató zártkörűvé nyilvánitja a pénzügyi kérdések tárgyalását és megtiltja az igyen kávé és pogácsa biztositását a cégnél
 Ernie, az új igazgató zártkörűvé nyilvánitja a pénzügyi kérdések tárgyalását és megtiltja az igyen kávé és pogácsa biztositását a cégnél")
75
Thelma, az egyik igazgatóhelyettes arra gondol, hogy a cég pénzügyi helyzete megromlott

76
Negativ példa A hiányzó hiteles információ helyét feltételezések és félelmek töltik be, ami téves következtetésekhez vezet

77
Pozitiv példa ( LIFE, Terano & al.) Director Tanaka receives a new secretary, Ms. Sato, on Monday. When Mr. Tanaka returns from lunch, he calls Ms. Sato and the next conversation follows: – 'Ms. Sato, I would like to have a cup of tea.' – 'Yes, Mr. Tanaka. Do you prefer hot or cold tea?' – 'Hot tea, please.’ – 'Do you prefer black or green tea?' – 'Give me black tea.' – ‘Do you need sugar?' – 'No sugar, please.' – 'Any milk to the tea?' – 'No, thank you.' So, Ms. Sato prepares the tea according to the request.

78
LIFE példa On Tuesday, after lunch the director calls Ms. Sato again. – 'May I have a cup of tea?' – 'Yes, Mr. Tanaka. Black tea, again?' – 'Yes.' – 'No sugar, no milk?' – 'Exactly as you say.' Now fewer questions led to the same action by the secretary. On Wednesday, when Mr. Tanaka arrives, he does not say anything but – 'May I?' – 'The usual tea?' – 'Yes.' On Thursday, when the director comes in after lunch, Ms. Sato asks him: – 'May I prepare your usual tea?' – 'Yes, thank you.'

79
LIFE példa One day Mr. Tanaka arrives from lunch and Ms. Sato asks the everyday question: – 'May I prepare your usual tea?' This time the answer is: – 'No, today I prefer coffee.” – 'Do you drink it long or short?” – 'Short please.' – 'Any sugar?' – 'No, thank you.' – 'Any milk?' – 'Yes, some milk, please.'

80
LIFE példa Another time Mr. Tanaka requests a glass of mineral water after drinking his (otherwise not too frequent) cup of coffee. This brings in a third option in the codebook of Ms. Sato, concerning cold drinks after lunch (and possibly after the coffee). The codebook might never be completed, it should be continuously adapted.
 cup of coffee. This brings in a third option in the codebook of Ms. Sato, concerning cold drinks after lunch (and possibly after the coffee). The codebook might never be completed, it should be continuously adapted..")
81
Scenario (LIFE) Viszlát, Ms. Sato…
 Viszlát, Ms. Sato…")
82
Asztalok rendezése (LIFE) directions are described by N, E, S, W the sides of the tables are always parallel with the N- S and E-W axes U shape (U)T shape (T) large oblong (O) rows (R)
 directions are described by N, E, S, W the sides of the tables are always parallel with the N- S and E-W axes U shape (U)T shape (T) large oblong (O) rows (R)")
83
Kooperáló intelligens robotok

84
Hogyan gondolkoznak a robotok? The group of autonomous intelligent mobile robots are supposed to solve transportation problems according to the exact instruction given to the Robot Foreman (R 0 ). The other robots have no direct communication links with R 0 and all others, but can solve the task by intention guessing from the actual movements and positions of other robots, even though they might not be unambiguous. The group of autonomous intelligent mobile robots are supposed to solve transportation problems according to the exact instruction given to the Robot Foreman (R 0 ). The other robots have no direct communication links with R 0 and all others, but can solve the task by intention guessing from the actual movements and positions of other robots, even though they might not be unambiguous.
. The other robots have no direct communication links with R 0 and all others, but can solve the task by intention guessing from the actual movements and positions of other robots, even though they might not be unambiguous. The group of autonomous intelligent mobile robots are supposed to solve transportation problems according to the exact instruction given to the Robot Foreman (R 0 ). The other robots have no direct communication links with R 0 and all others, but can solve the task by intention guessing from the actual movements and positions of other robots, even though they might not be unambiguous..")
85
Robot -helyzetek two robots are needed for pushing or turning a table at each side of the tables, two spaces are available for the robots manipulating them – P CC : “counterclockwise position” – P CW stands for “clockwise position” – R denotes the robot in question RR N

86
three essentially different combinations: – C SH : “shifting combination”, when two robots (R 1 and R 2 ) are side by side at the same side of the table – C RC : “counterclockwise rotation combination” – C RW : “clockwise rotation combination” N R2R2 R1R1 R1R1 R2R2 R2R2 R1R1 C SH C RW C RC
 are side by side at the same side of the table – C RC : counterclockwise rotation combination – C RW : clockwise rotation combination N R2R2 R1R1 R1R1 R2R2 R2R2 R1R1 C SH C RW C RC")
87
C ST1 and C ST2 are both essentially three robot combinations, where either R 1 and R 2 are attempting a shift and R3 positions itself to prevent it, or R 2 and R 3 / R 1 and R 3 are starting a rotation and R 1 and R 2 prevent it, knowing that the intended move is wrong from the point of view of the goal configuration N R1R1 R2R2 R1R1 R2R2 R3R3 R3R3 C ST1 C ST2

88
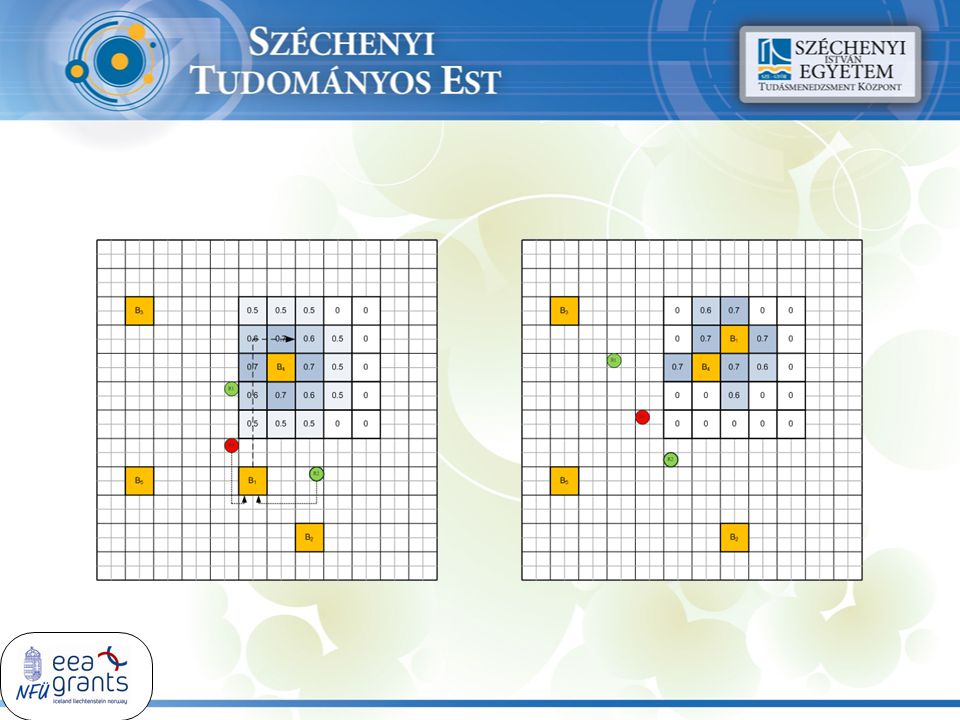
Hogyan épül a robotok tudástára? Example: – a robot (R 1 ) is taking up a P CC position at the East side of a table – robot (R 2 ) is the nearest free robot that will go to the same table to help R1R1 R2R2 1 2 3
 is taking up a P CC position at the East side of a table – robot (R 2 ) is the nearest free robot that will go to the same table to help R1R1 R2R")
89
A használt matematikai elem: fuyzzy szignatúra x 11 x 12 x1x1 x 21 x 221 x 222 x 223 x 23 x 31 x 32 x2x2 x3x3 x x 22

90
Ms. Tanaka tudástára oolong cold drink coffee tea cold hot green black milk sugar water juice coke sugar short long milk still sparkling 0.00 1.00 0.18 0.74 0.08 0.00 1.00 0.00 0.3 STST SCSC S CD

91
Communication elements in the Tanaka scenario Mr. Tanaka arrives after lunch Mr. T. requests tea Mr. T. requests coffee tea coffee cold drink Mr. T. requests a cold drink (water) coffee cold drink
 coffee cold drink.")
92
A robotok tudástára C ST C ST move to T 1 nearest not nearest R i = (P CW,N) R i = (P CW,S) R i = (P CC,S) wrong move shift rotate R j = P CC R j = P CW......... R j = E R j = S R j = WR j = N decision tree for R i when R j has taken up position P k at table T l : some signatures for R i depending on R j 's position P k at table T l :

93
Robotos példa The actions of R i are described by membership degrees – μ St (Stop combination) – μ Sh (Shift combination) – μ Ro (Rotate combination) if R j very likely prepares to destroy an almost ready “U” configuration, then R i will raise the membership degree μ St high (e. g. to 0.8), and lower the other two (to 0.1 each). Then it will follow the most likely good action and take up the position (W, P CC ) for stopping the erroneous action. RjRj RiRi
, and lower the other two (to 0.1 each). Then it will follow the most likely good action and take up the position (W, P CC ) for stopping the erroneous action. RjRj RiRi.")
94
Másik példa a likely good move is increasing the degree of the likeliness of the Shift move R i will move to (S,P CW ) at the table in question. RiRi RjRj

95
Hardver robotos kisérletek Speciális kis robotokat épitünk Kész robotokat is használunk Csak most kezdtük...

96
Első robot

97
Második robot

99
Akadályelkerülés

100
Szinfelismerés

101
Példák ládák elrendezésekre The base idea of this example has come partly from LIFE and from real industrial problems. There is a warehouse where some square boxes wait for ordering. Various configurations can be made from them, based on their color and tags.

102
Robotkombinációk Eltolás és forgatásEltolás és forgatás

103
A robotok fuzzy gondolkodása

104
Hogy módosul a robotok „agya”?

106
Marilou szimulációs szoftver 106

108
Szimulált jelenet 108

109
Fedélzeti kamerás szimuláció R0 on-board camera 3x realtime

110
A következő előadásunk : 2010.október 13. Dr. Budai István Segitenék. (Hogyan) segíthetek? 110
 segíthetek 110")
111
KÖSZÖNJÜK MEGTISZTELŐ FIGYELMÜKET! A program szervezői, támogatói: A rendezvény a „SZ i ENCE4YOU – Tudás- és tudomány disszemináció a Széchenyi István Egyetemen” című projekt keretében valósult meg. TÁMOP-4.2.3-08/1-2008-0011

Hasonló előadás













 MORE?” symposium Washington.>")








 n Áttekintés n Példák.>")