Előadást letölteni
Az előadás letöltése folymat van. Kérjük, várjon

1
Mozgó Objektumok Detektálása és Követése Robotkamera Segítségével
Horváth Péter Témavezető: Dr. Kató Zoltán

3
Összefoglalás gyors módszer optical flow real-time meghatározására
mozgó objektumok követése Gaussian Mixture modell és Expectation Maximization segítségével robotkamera bemutatása (mechanikai, elektronikai felépítése, vezérlőprogram) kísérleti eredmények bemutatása a robotkamera tesztje
 kísérleti eredmények bemutatása. a robotkamera tesztje.")
4
Optical Flow Az optical flow field egy olyan vektormező, mely megmutatja, hogy egy képkocka pixelei milyen irányban és mennyire mozdultak el.
![]()
5
Maximálisan egy pixel nagyságú mozgások meghatározása
Futásidő = θ(NM) Segítségével lehetővé vált a real-time implementáció Kísérleteink alapján legjobbnak a következő módszer bizonyult: Környezet vizsgálata normális eloszlás sűrűségfüggvényével súlyozva:
![]()
6
Gauss-piramis felépítése, méretének meghatározása
Ha a kép méretét felére csökkentjük a mozgások is felére csökkennek, ezt folytatva az x. művelet után a mozgások nagysága 2x-edére csökken.

7
Visszafelé dolgozó stratégia
A piramis legfelső szintjén meghatározzuk a maximum 1 pixel nagyságú mozgásokat majd egy szinttel lejjebb ugrunk, itt a (2i, 2j), (2i+1, 2j), (2i, 2j+1) és (2i+1, 2j+1) vektorok megkapják az előző szint (i, j) vektor értékétnek kétszeresét. Ezen becslés után egy finomító lépés következik.
, (2i+1, 2j), (2i, 2j+1) és (2i+1, 2j+1) vektorok megkapják az előző szint (i, j) vektor értékétnek kétszeresét. Ezen becslés után egy finomító lépés következik.")
8
Optical Flow becslése — összefoglalás
Az Optical Flow meghatározása: 2 szekvencia kiválasztása Gauss-piramis elkészítése a két képből A felső szinten maximálisan 1 pixel nagyságú mozgások meghatározása. Egy szinttel alacsonyabban lévő Optical Flow vektorok meghatározása: Vektorok duplázása Finomítás GOTO 4 ha nem értük el a piramis alsó szintjét Megjegyzés: Ha a gyakorlati alkalmazásban elegendő pontosságú a becsült Optical Flow, akkor ezen még javíthatunk egy opcionális ponttal, ha a Finomítás után egy simítást végzünk a vektormezőn.

9
Összefoglalás gyors módszer optical flow real-time meghatározására
mozgó objektumok követése Gaussian Mixture modell és Expectation Maximization segítségével robotkamera bemutatása (mechanikai, elektronikai felépítése, vezérlőprogram) kísérleti eredmények bemutatása a robotkamera tesztje
 kísérleti eredmények bemutatása. a robotkamera tesztje.")
10
Mozgó objektumok követése
Cél: Adott referenciaobjektum követése

11
HSV, LUV színterek, 2D hisztogram
RGB nem használható megfelelően HSV, LUV,… van egy komponens a fényerőnek Ezt a komponenst elhagyva egy fényre invariáns 2D színteret kapunk. 2D hisztogram készítése HSV: gyors, de nem lineáris a transzformáció LUV: az emberi szem színtávolság érzetét jól közelíti, lassú nem lineáris transzformáció a hatványozás miatt

12
Expectation Maximization
ismeretlen eloszlás Gauss-eloszlások segítségével közelítjük Expectation Maximization Dempster et al. 1977

13
Expectation Maximization
Várható értékek, valószínűségek (m=4 esetén): p(j) ( , ) 0.182 ( , ) ( , ) ( , )
: p(j) ( , ) ( , ) ( , ) ( , )")
14
Gaussian Mixture Model
Jelölje a követendő objektumot mely hisztogramjának sűrűségét EM-el becsültük. legyen egy tetszőleges pont melynek ismert a színe. Annak a valószínűsége, hogy a pixel az O objektumhoz tartozik: , ahol P(j) a j. komponens valószínűsége. Természetesen: Annak a valószínűsége pedig, hogy a -t a j. komponens tartalmazza:
 a j. komponens valószínűsége. Természetesen: Annak a valószínűsége pedig, hogy a -t a j. komponens tartalmazza:")
15
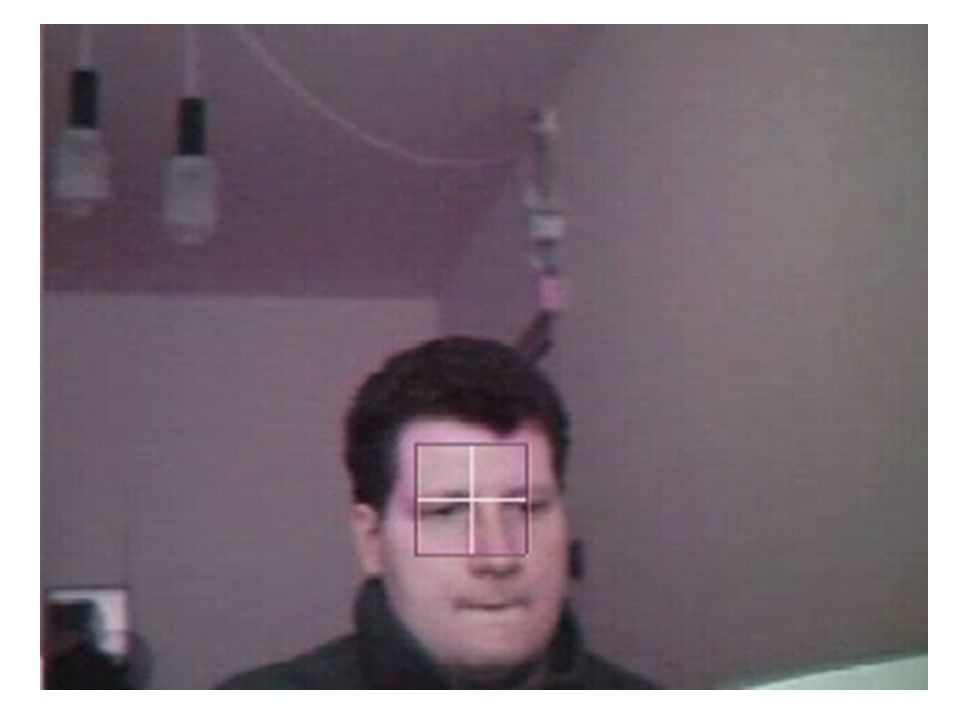
Az objektum lokalizálása
Az objektum a t-1. képkockán Lt-1 középpontban St-1 méretű bounding-box-szal (befoglaló téglalap) A t. képkocka az Lt: Ebből a St: Küszöbölés
 A t. képkocka az Lt: Ebből a St: Küszöbölés.")
16
Összefoglalás gyors módszer optical flow real-time meghatározására
mozgó objektumok követése Gaussian Mixture modell és Expectation Maximization segítségével robotkamera bemutatása (mechanikai, elektronikai felépítése, vezérlőprogram) kísérleti eredmények bemutatása a robotkamera tesztje
 kísérleti eredmények bemutatása. a robotkamera tesztje.")
17
A robotkamera

18
A robotkamera felépítése
mozgatás: léptetőmotorok kommunikáció: PC párhuzamos port saját mikroprocesszor (PIC16C84)
")
19
Összefoglalás gyors módszer optical flow real-time meghatározására
mozgó objektumok követése Gaussian Mixture modell és Expectation Maximization segítségével robotkamera bemutatása (mechanikai, elektronikai felépítése, vezérlőprogram) kísérleti eredmények bemutatása a robotkamera tesztje
 kísérleti eredmények bemutatása. a robotkamera tesztje.")
20
Kísérleti eredmények – optical flow

21
Kísérleti eredmények

22
Összefoglalás gyors módszer optical flow real-time meghatározására
mozgó objektumok követése Gaussian Mixture modell és Expectation Maximization segítségével robotkamera bemutatása (mechanikai, elektronikai felépítése, vezérlőprogram) kísérleti eredmények bemutatása a robotkamera tesztje
 kísérleti eredmények bemutatása. a robotkamera tesztje.")
23
Vége Köszönöm a figyelmet!

Hasonló előadás






 egy halmaza. Feladatunk: az objektumokat - valamilyen.>")








>")
 anyagok alapján>")


