Előadást letölteni
1
Kompenzálás a felnyitott hurok pólusai és fázistartaléka alapján
A kompenzálás célja a minőségi paraméterek javítása. Ideális esetben a szabályozási hiba, a szabályozási idő, és a túllövés nulla. A valóságban a nulla szabályozási hiba, és a még elfogadható túllövés mellett a lehető leggyorsabb beállási idő az elérendő cél.

2
Minőségi paraméterek Egység-ugrás bemenet hibajel yh = hid-h(∞)
Tolerancia hibasáv ∆= 5% Szabályozási idő Ta Végérték h(∞) Csúcsérték h(Tp) Alapérték (elvárt érték) hid
 Csúcsérték h(Tp) Alapérték (elvárt érték) hid.")
3
Egyszerűsített szabályozási kör
u(s) végrehajtó jel ym(s) ellenőrző jel r(s) alapjel e(s) rendelkező jel Gc(s) Gp(s) Gf(s)=1 A felnyitott hurok átviteli függvénye: A zárt szabályozási kör alapjel – ellenőrző jel átviteli függvénye:
 végrehajtó jel. ym(s) ellenőrző jel. r(s) alapjel. e(s) rendelkező jel. Gc(s) Gp(s) Gf(s)=1. A felnyitott hurok átviteli függvénye: A zárt szabályozási kör alapjel – ellenőrző jel átviteli függvénye:")
4
A klasszikus PID szabályozó struktúrája

5
Mintafeladat Legyen a legegyszerűbb szabályozási kör modellben a szakasz Gp(s) és a kompenzáló tag Gc(s) átviteli függvényei az alábbiak: 1. Határozza meg a szakasz pólusait, és ez alapján az időállandóit. Definiálja a G0(s) felnyitott hurok átviteli függvényt, és a Grym(s) zárt szabályozási kör alapjel átviteli függvényét. A zárt szabályozási kör alapjel átmeneti függvényéből határozza meg a yh hibajelet, a Ta szabályozási időt, és az Mp túllövést %-os értékeit. 2. Legyen a kompenzáló tag P szabályozó és a Gc(s) = Kp erősítés értékét úgy változtassa meg, hogy a fázistartalék 58 – 62 között legyen. Határozza meg a yh, a Ta, és az Mp% értékeit.
 felnyitott hurok átviteli függvényt, és a Grym(s) zárt szabályozási kör alapjel átviteli függvényét. A zárt szabályozási kör alapjel átmeneti függvényéből határozza meg a yh hibajelet, a Ta szabályozási időt, és az Mp túllövést %-os értékeit. 2. Legyen a kompenzáló tag P szabályozó és a Gc(s) = Kp erősítés értékét úgy változtassa meg, hogy a fázistartalék 58 – 62 között legyen. Határozza meg a yh, a Ta, és az Mp% értékeit.")
6
Megjegyzés A fázistartalékra méretezés menete
A példában a fázistartalék (phase margin) kívánt értéke 58 < pm < 62. (Ekkora fázistartalék eseté a tényleges fázistolás -118 > ps >-122) A felnyitott hurok Bode diagramján keresse meg azt a körfrekvenciát (w), ahol a fázistolás (phase shift ) -118 > ps > -122 között van. Ezen a körfrekvencián (w), a felnyitott hurok erősítés értéke „a”, a leolvasott x dB értékéből az ismert módon számítható. A kompenzáló tag egyenletében kp(j+1)=kp(j)/a helyettesítéssel, a felnyitott hurok Bode diagramján ezen a körfrekvencián lesz a vágási körfrekvencia. A fázistartalék (phase margin) 58 < pm < 62 között lesz.
 kívánt értéke 58 < pm < 62. (Ekkora fázistartalék eseté a tényleges fázistolás -118 > ps >-122) A felnyitott hurok Bode diagramján keresse meg azt a körfrekvenciát (w), ahol a fázistolás (phase shift ) -118 > ps > -122 között van. Ezen a körfrekvencián (w), a felnyitott hurok erősítés értéke „a , a leolvasott x dB értékéből az ismert módon számítható. A kompenzáló tag egyenletében kp(j+1)=kp(j)/a helyettesítéssel, a felnyitott hurok Bode diagramján ezen a körfrekvencián lesz a vágási körfrekvencia. A fázistartalék (phase margin) 58 < pm < 62 között lesz.")
7
Mintafeladat folytatása
3. A Gc(s) legyen PI szabályozó és a paramétereit úgy állítsa be, hogy az erősítés Kp marad az előző érték, és a Ti= -1/pmin. Majd a G0 Bode diagramja segítségével Kp értékét úgy változtassa, hogy a fázistartalék 58 – 62 között legyen. Határozza meg a yh, a Ta, és az Mp% értékeit. 4. A Gc(s) legyen PID szabályozó és a paramétereit úgy állítsa be, hogy az erősítés Kp, és a Ti marad az előző érték, és Td = -1/pm2. A pm2 a második legkisebb pólus. Figyelem ha nem teljesül a Ti > 4Td, akkor csökkentse a Td értékét. Majd a G0 Bode diagramja segítségével Kp értékét úgy változtassa, hogy a fázistartalék 58 – 62 között legyen. Határozza meg a yh, a Ta, és az Mp% értékeit.
 legyen PI szabályozó és a paramétereit úgy állítsa be, hogy az erősítés Kp marad az előző érték, és a Ti= -1/pmin. Majd a G0 Bode diagramja segítségével Kp értékét úgy változtassa, hogy a fázistartalék 58 – 62 között legyen. Határozza meg a yh, a Ta, és az Mp% értékeit. 4. A Gc(s) legyen PID szabályozó és a paramétereit úgy állítsa be, hogy az erősítés Kp, és a Ti marad az előző érték, és Td = -1/pm2. A pm2 a második legkisebb pólus. Figyelem ha nem teljesül a Ti > 4Td, akkor csökkentse a Td értékét. Majd a G0 Bode diagramja segítségével Kp értékét úgy változtassa, hogy a fázistartalék 58 – 62 között legyen. Határozza meg a yh, a Ta, és az Mp% értékeit.")
8
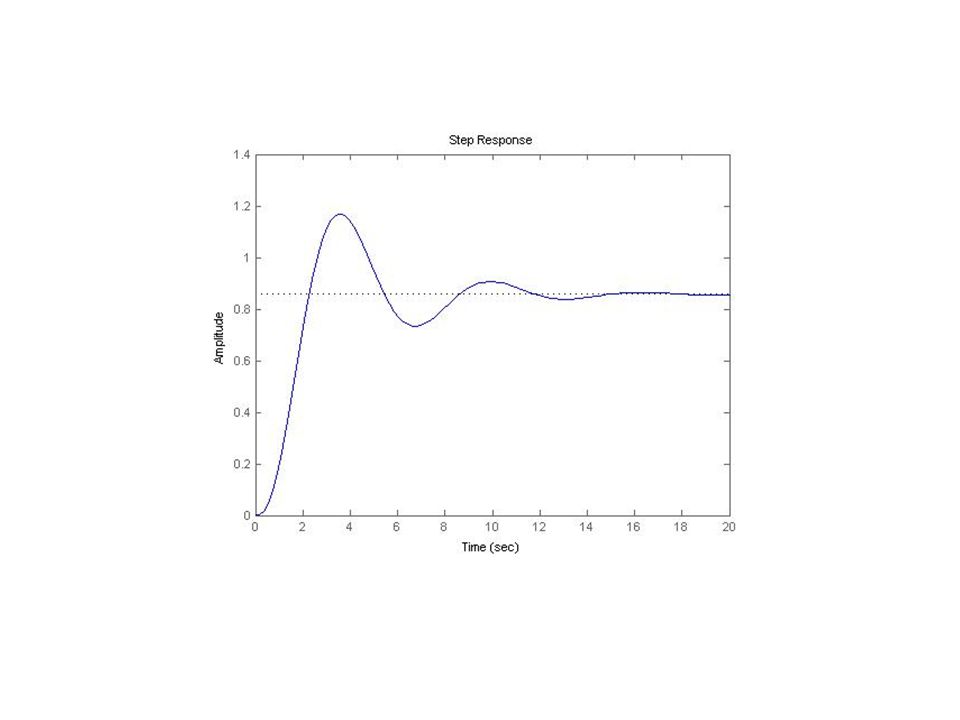
A feladat megoldás 1. Az átviteli függvények definiálása: Eredmény:
kp1=tf([2],[1]); gp=tf(1.2,[ ]); nevezo= [ ]; roots(nevezo) ga=tf(1,1); gi=tf(1,[5 0]) gd=tf([1 0],[0.2 1]) gc1=series(ga,kp1) g01=series(gc1,gp) grym1=feedback(g01,1) Eredmény: p1=-2 →T1=0,5 sec. p2=-1 →T2=1 sec. p3=-0,2 →T3=5 sec. Átmeneti függvény step(grym1) yh=1-0,86=0,14 Mp=(1,17-0,86)/0,86=0,36→36% Ta= 10 sec. {0,82 – 0,9}
; gp=tf(1.2,[ ]); nevezo= [ ]; roots(nevezo) ga=tf(1,1); gi=tf(1,[5 0]) gd=tf([1 0],[0.2 1]) gc1=series(ga,kp1) g01=series(gc1,gp) grym1=feedback(g01,1) Eredmény: p1=-2 →T1=0,5 sec. p2=-1 →T2=1 sec. p3=-0,2 →T3=5 sec. Átmeneti függvény. step(grym1) yh=1-0,86=0,14. Mp=(1,17-0,86)/0,86=0,36→36% Ta= 10 sec. {0,82 – 0,9}")
10
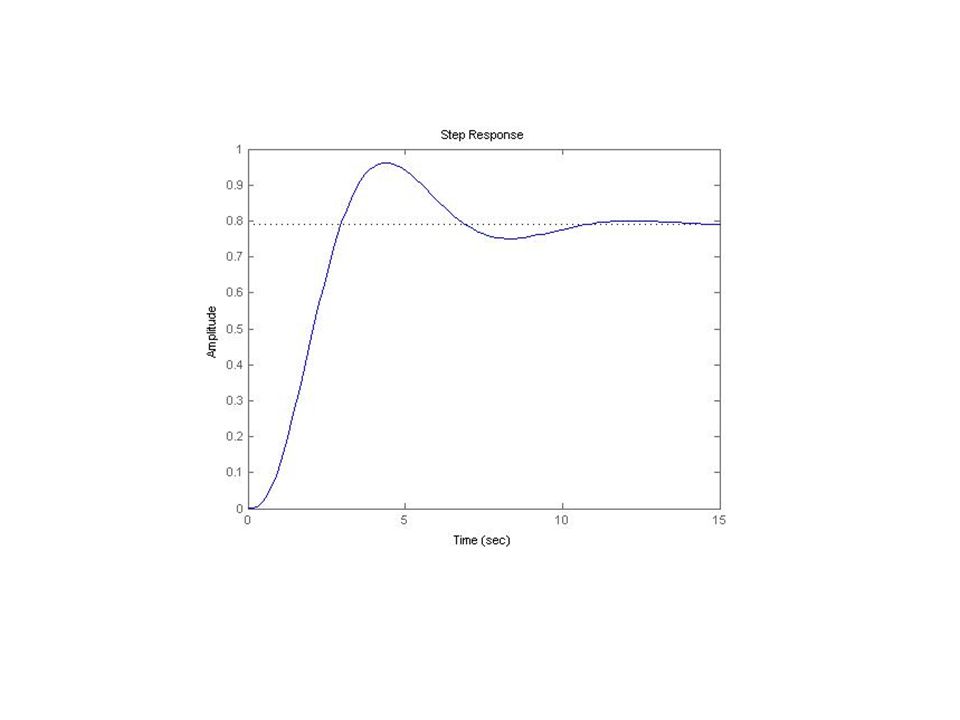
A feladat megoldás 2. Eredmény: Felnyitott hurok átviteli függvény:
bode(g01,{0.2, 2}) (ha nem elég pontos) bode(g01,{0.5, 1}) kp2=tf([1.26],[1]); gc2=series(ga,kp2) Eredmény: w=0,595 → x=3,95 dB a=1,58 → kp2=2/1,58=1,26 Az átviteli függvények definiálása: go2=series(gc2,gp) grym2=feedback(g02,1) Átmeneti függvény step(grym2) yh=1-0,791=0,209 Mp%={(0,962-0,791)/0,791}100=21,6% Δ=0,83 – 0,75 Ta=6,26 sec.
 (ha nem elég pontos) bode(g01,{0.5, 1}) kp2=tf([1.26],[1]); gc2=series(ga,kp2) Eredmény: w=0,595 → x=3,95 dB. a=1,58 → kp2=2/1,58=1,26. Az átviteli függvények definiálása: go2=series(gc2,gp) grym2=feedback(g02,1) Átmeneti függvény. step(grym2) yh=1-0,791=0,209. Mp%={(0,962-0,791)/0,791}100=21,6% Δ=0,83 – 0,75. Ta=6,26 sec.")
12
A feladat megoldás 3. Eredmény: Kompenzáló tag átviteli függvény:
gpi=parallel(ga,gi) gc23=series(gpi,kp2) Az átviteli függvények definiálása: g023=series(gc23,gp) Bode bode(g023) w=0,361 → x=5,75 dB a=1,94 → kp3=1,26/1,94=0,65 Módosított kompenzáló tag gc3=series(gpi,kp3) A felnyitott hurok átmeneti függvénye g03=series(gc3,gp)
 gc23=series(gpi,kp2) Az átviteli függvények definiálása: g023=series(gc23,gp) Bode. bode(g023) w=0,361 → x=5,75 dB. a=1,94 → kp3=1,26/1,94=0,65. Módosított kompenzáló tag. gc3=series(gpi,kp3) A felnyitott hurok átmeneti függvénye. g03=series(gc3,gp)")
13
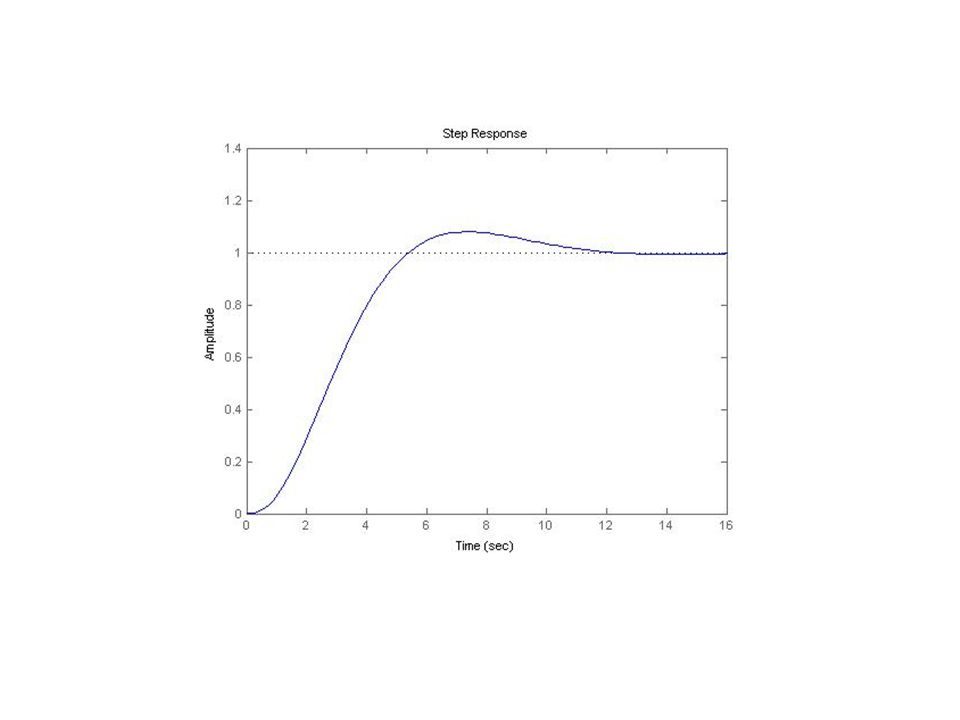
A feladat megoldás 3. folytatás
Eredmény: A zárt kör átviteli függvénye grym3=feedback(g03,1) A zárt szabályozási kör átmeneti függvénye step(grym3) yh=0 Mp%=8% Δ=1,05 – 0,95 Ta=9,23 sec.
 A zárt szabályozási kör átmeneti függvénye. step(grym3) yh=0. Mp%=8% Δ=1,05 – 0,95. Ta=9,23 sec.")
15
A feladat megoldás 4. Eredmény: A kompenzáló tag meghatározása: Bode
gpid=paralel[gpi,gd] gc34=series(gpid,kp3) g034=series(gc34,gp) Bode bode(g034,{0.2,2}) w=1,01 → x=-9,71 dB a=0,33 → kp4=0,65/0,33=2 Felnyitott hurok átviteli függvény meghatározása: gc4=series(gpid,kp4) g04=series(gc4,gp)
 g034=series(gc34,gp) Bode. bode(g034,{0.2,2}) w=1,01 → x=-9,71 dB. a=0,33 → kp4=0,65/0,33=2. Felnyitott hurok átviteli függvény meghatározása: gc4=series(gpid,kp4) g04=series(gc4,gp)")
16
A feladat megoldás 4. folytatás
Eredmény: Felnyitott hurok átviteli függvény g04=series(gc4,gp) Zárt szabályozási kör átviteli függvény grym4=feedback[g04,gf] Zárt szabályozási kör átmeneti függvény step(grym3) yh=0 Mp%=8% Ta=3,1 sec
 Zárt szabályozási kör átviteli függvény. grym4=feedback[g04,gf] Zárt szabályozási kör átmeneti függvény. step(grym3) yh=0. Mp%=8% Ta=3,1 sec.")













>")







