Előadást letölteni
Az előadás letöltése folymat van. Kérjük, várjon

1
Robotika I, Robotika II. Robotizált Rendszerek Robottechnika Gyakorlat nappali és levelező péntek Robotika és Gyártásautomatizálás - - Gyártásautomatizálás és Robotika Prof. KOVÁCS György PTE PMMIK Műszaki Informatika és Villamos Intézet Műszaki Informatika Tanszék

2
1-2796140, 30-5455704 gkovacs@sztaki.hu gkovacs@pmmik.pte.hu
Kovács György MTA SZTAKI, Budapest, Kende u PTE PMMIK Műszaki Informatika Tsz. Rókus u. 2. ftp://witch.pmmik.pte.hu:2001/Tanszeki_anyagok/ Muszaki Informatika Tanszek/Dr. Kovács György ,

3
A szemeszter felépítése, 2014 jan. – máj.
Előadások és gyakorlatok: péntek Kimarad: ……………… Előadás: kb ig, utána gyakorlat: beszélgetés Gyakorlat: robot programozása : hu/users/jagasics.szilard/rob_cnc/robot/fanuc/RJ3.pdf ftp://witch.pmmik.pte.hu:2001/Tanszeki_anyagok/Muszaki%20Informatika%20Tanszek/ A szemeszter végén, az utolsó órákon: Zh. (30%) Szóbeli vizsgabeszélgetés (50%) A programok futtatása folyamatosan is (20%) Most: kis teszt – csak tájékoztató
 Szóbeli vizsgabeszélgetés (50%) A programok futtatása folyamatosan is (20%) Most: kis teszt – csak tájékoztató")
4
Tematika Bevezetés a gyártásautomatizálásba, alapfogalmak, a robotok helye és szerepe Robotokról: történetük, fajtáik, alkalmazások Videok: robotfoci, SZTAKI demók, ipari rob., stb. Tervezési segédeszközök: modellezés, szimuláció, OO, AI, Hibrid rendszerek Intelligencia – Mesterséges Intelligencia (AI) OO eszközök, tervezési módszertanok Robotic Hand-book 1. és 2.
 OO eszközök, tervezési módszertanok. Robotic Hand-book 1. és")
5
Előadandó ppt és egyebek
0 alt-bev-kgy-pecs -- vezérfonal 00A fejlődés -- rövid általános RJ3 -- FANUC ipari robot vezérlés 0a Bevezetés az intelligenciaba 1-Bolyai-robot, 2-Robotok2-videotlan 3a-grippers, 3-Tovabbi robotok, 9hegesztes 4a-hun-OO, 4b-Integrated Definition (IDEF) robhandbook1-2, 7-UP-to-date paradigms 8nagyprojektek(up-to-2-helyett) – EU közös VIDEÓK: Rubik, ISF, foci, Euron, terítés, jenga
 robhandbook1-2, 7-UP-to-date paradigms 8nagyprojektek(up-to-2-helyett) – EU közös VIDEÓK: Rubik, ISF, foci, Euron, terítés, jenga")
6
Pécs, 2014 február 7 – Robotika nyitó teszt
Rövid válaszokat kérek: Mi az abacus ?? a logarléc ?? az analóg számítógép ?? az eszterga ?? a marógép ?? Ki volt Kempelen Farkas ?? Neumann János ?? Bolyai Farkas ?? Bolyai János ?? Németh László ?? Mit jelent, mi a tartalma, lényege ?? NC, CNC, DNC, PLC, RC/// CAD, CAM, CAPP, CAE – Caxx, CIM/// 2D, 3D....7D, FEM/// FMC, FMS/// MRP, ERP, MES, JIT, ISO, OSI/// MAP, TOP, MMS, IGES, STEP, BBQ, SADT EDI/EDIFACT///AI, DAI, KB, ES, GA///CIM-OSA, GRAI, PERA, GERAM, IMS/// OO, OOSE, HOOD, OMT, UML, IDEF 6

7
Megfejtések abacus – golyós számoló keret
logarléc – analóg számolóeszköz analóg számítógép – logarléc elektronikusan, Diff egy., szumma, integrálás, szorzás eszterga – forgástest megmunkáló gép marógép – nem forgástest megmunkáló gép

8
Megfejtések Németh László (1901-1975):
Gyász, Bűn, Iszony, Égető Eszter és „A két Bolyai” Farkas ( ), János ( ) Kempelen Farkas- (Wolfgang von Kempelen) (Pozsony, – Bécs, 1804.) sakkautomata, beszélő gép Neumann János – Játékelmélet, röppálya számítás, tárolt program
, János ( ) Kempelen Farkas- (Wolfgang von Kempelen) (Pozsony, – Bécs, 1804.) sakkautomata, beszélő gép. Neumann János – Játékelmélet, röppálya számítás, tárolt program")
9
Abacus Ókor digitális Logarléc 1624 analóg

10
Mária Terézia, (1717–1740-1780), II. József (1741–1780-1790)
II. Lipót (1747–1792), II. Ferenc (I. Ferenc) Kempelen ( ) Sakk-automata A török Törpe Tükrök Pantográf
, II. Ferenc (I. Ferenc) Kempelen. ( ) Sakk-automata. A török. Törpe. Tükrök. Pantográf")
11
Matematikai probléma -- analóg fizikai rendszer
Matematikai probléma -- analóg fizikai rendszer. A megoldást egy fizikai mennyiség állapotának, illetve változásának mérése adja meg. Főleg diff. Egyenletekre. A digitális számítógép viszont egy függvény értékeit számítja ki a kívánt diszkrét helyeken. Összegzés Integrálás Szorzás

12
Marógép Eszterga Külön file: A fejlődés

13
CAD CAM CAPP CAQ CAE FEM CIM NC CNC DNC RC PLC FMC FMS MES IMS
NC CNC DNC RC PLC FMC FMS MES IMS

14
MAP TOP MMS IGES STEP EDI OSI ISO JIT MRP ERP

15
CIM-OSA GRAI-GIM PERA GERAM AI DAI KB ES GA Fuzzy OO OMT OOSE SADT
CIM-OSA GRAI-GIM PERA GERAM AI DAI KB ES GA Fuzzy OO OMT OOSE SADT

16
CAD Computer Aided Design CAM Computer Aided Manufacturing
CAPP Computer Aided Process Planning CAPP Computer Aided Production Planning CAQ Computer Aided Quality CAE Computer Aided Engineering FEM Finite Element Method CIM Computer Integrated Manufacturing NC Numerical Control CNC Computer Numerical Control DNC Direct Numerical Control RC Robot Control PLC Programmable Logical Control FMC Flexible Manufacturing Cell FMS Flexible Manufacturing System MES Manufacturing Execution System IMS Intelligent Nanufacturing System

17
TOP Technical and Office Protocol
MAP Manufacturing Automation Protocol TOP Technical and Office Protocol MMS Manufacturing Message Specification IGES Initial Graphics Exchange Specification STEP Standard for the Exchange of Product Model Data EDI Electronic Data Interface OSI Open System Interconnection ISO International Standard Organization JIT Just in Time MRP Material Resource Planning ERP Enterprise Resource Planning

18
CIM-OSA Computer Integrated Manufacturing – Open System Architecture
CIM-OSA Computer Integrated Manufacturing – Open System Architecture GRAI-GIM GRAI (Univ. of Bordeaux) Integrated Methodology PERA Purdue Enterprise Reference Architecture and Methodology GERAM Generic Enterprise Reference Architecture and Methodology AI Artificial Intelligence DAI Distributed Artificial Intelligence KB Knowledge Base ES Expert System GA Genetic Algoritm Fuzzy OO Object Oriented OMT Object Modeling Technique OOSE Object Oriented System Engineering SADT System Analysis Design Technique Most betét: 00A fejlődés
 Integrated Methodology. PERA Purdue Enterprise Reference Architecture and Methodology. GERAM Generic Enterprise Reference Architecture and Methodology. AI Artificial Intelligence. DAI Distributed Artificial Intelligence. KB Knowledge Base. ES Expert System. GA Genetic Algoritm. Fuzzy. OO Object Oriented. OMT Object Modeling Technique. OOSE Object Oriented System Engineering. SADT System Analysis Design Technique. Most betét: 00A fejlődés")
19
A gyártásautomatizálás felé - néhány rövidítés
Szerszámok, gépek, szerszámgépek Reszelő, fogó, fúró, vágó, maró, eszterga, hajlító stb. stb. NC, CNC, DNC, PLC, RC CAD, CAM, CAPP, CAE – Caxx, CIM 2D, 3D....7D, FEM FMC, FMS, MRP, ERP, MES, JIT, ISO, OSI MAP, TOP, MMS, IGES, STEP, EDI/EDIFACT AI, DAI, KB, ES, GA CIM-OSA, GRAI, PERA, GERAM IMS – Intelligent Manufacturing Systems

20
TERVEZÉS-GYÁRTÁS-ELLENŐRZÉS
Logikai tervezés Konstrukciós tervezés GYÁRTÁS, SZERELÉS Teszt Diagnózis RC NC CNC DNC PLC CAD CAM I N F O R M Á C Ó CAQ

21
Ember-számítógép tevékenység-integrálás: CIM ‘69
Igények Szükségletek Kreativitás Ötletek Termelékenység Teljesítmény Termék terv Folyamat terv Folyamat irányítás Megmunkáló eszközök Gyártás Költségek kapacitás Végső termék : Folyamat=gyártás ?? Szerelt, tesztelt

22
Trendek a gyártásban/1 Gyártás: alkatrészgyártás-szerelés
Régen: manufaktura (egyedi-), automatizált (tömeg-), kis- és nagy-sorozat előálítás Ma: hála az automatizálásnak, a rugalmasságnak, a számítógépes rendszereknek, stb. Tömeggyártás, sorozatgyártás, egyedi gyártás - robotalkalmazásokkal További integrálás a CIM-mel (pl. PP, AI eszközök, tulajdonságalapú CNC) Idő szerepe nő (CE, gyors és virtuális prototípus, virtuális gyártás, szimuláció)
, automatizált (tömeg-), kis- és nagy-sorozat előálítás. Ma: hála az automatizálásnak, a rugalmasságnak, a számítógépes rendszereknek, stb. Tömeggyártás, sorozatgyártás, egyedi gyártás - robotalkalmazásokkal. További integrálás a CIM-mel (pl. PP, AI eszközök, tulajdonságalapú CNC) Idő szerepe nő (CE, gyors és virtuális prototípus, virtuális gyártás, szimuláció)")
23
Trendek a gyártásban/2 Minőség szerepe nő (megfigyelés, diagnosztika, TQM, ultrapreciziós/nano- technológiák) Műszaki és menedzsment döntések együtt (BPR, vállalati integrálás, DSS) Világméretű globalizáció, szabványosítás Fenntartható fejlődés (zöld termelés, olcsó termelés, szerelés-szétszerelés-újrafelhasználás-újrahasznosítás-maradékfeldolgozás): reuse, recycle Product life-cycle management (PLM) Termék életciklusra tervezés
 Világméretű globalizáció, szabványosítás. Fenntartható fejlődés (zöld termelés, olcsó termelés, szerelés-szétszerelés-újrafelhasználás-újrahasznosítás-maradékfeldolgozás): reuse, recycle. Product life-cycle management (PLM) Termék életciklusra tervezés")
24
Trendek a gyártásban/3 Ember nélküli gyár már nem cél, de nő az ember szerepe (oktatás, új szervezeti formák) Rugalmas (flexible) gyártás Modellezés, szimuláció, virtuális gyártás (Természetes és) Mesterséges Intelligencia alkalmazás nagyon széles körben (intelligens tervezés, gyártás, üzemeltetés: folyamatok, rendszerek) A világméretű IMS projekt – már az EU is
 gyártás. Modellezés, szimuláció, virtuális gyártás. (Természetes és) Mesterséges Intelligencia alkalmazás nagyon széles körben (intelligens tervezés, gyártás, üzemeltetés: folyamatok, rendszerek) A világméretű IMS projekt – már az EU is")
25
CAD/CAM - Vonatkozó Szabványok
IGES - Initial Graphics Exchange Specification STEP - Standard for the Exchange of Product Model Data MAP/TOP - Manufacturing Automation Protocol /Technical and Office Protocol EDI, EDIFACT - Electronic Data Interchange

26
IMS: Intelligens gyártórendszerek Intelligent Manufacturing Sytems
Kezdeményező: Hiroyuki Yoshikawa, 1990 Régiók Ausztrália Kanada, USA Európai Unió, EFTA Japán További jelöltek: Korea, a világ egyéb részei

27
Néhány fontos fogalom/1
Modell-modellezés: valamely tárgy bizonyos (fő) tulajdonságainak leképzése pl. kisminta, famodell, számítógépes program stb. Szimuláció: a modell működtetése Passzív: „lefuttatjuk” a teljes, megtervezett folyamatot a modellen, ez főleg ellenőrzésre jó Aktív (intelligens): a szimuláció következő lépése valamilyen (pl. intelligens) kiértékelés alapján más-más lehet, így a szimuláció főleg tervezési segédeszköz
 tulajdonságainak leképzése pl. kisminta, famodell, számítógépes program stb. Szimuláció: a modell működtetése. Passzív: „lefuttatjuk a teljes, megtervezett folyamatot a modellen, ez főleg ellenőrzésre jó. Aktív (intelligens): a szimuláció következő lépése valamilyen (pl. intelligens) kiértékelés alapján más-más lehet, így a szimuláció főleg tervezési segédeszköz")
28
Néhány fontos fogalom/2
Virtuális gyártás (kiterjesztett gyártás) Nem szimuláció (noha sokan annak tartják), hanem olyan gyártás, amelyben több, más-más helyen lévő, önálló cég vesz részt és készít egy adott terméket, de a vevőnek ehhez nincs köze, nem tud róla Virtuális (kiterjesztett) vállalat a virtuális gyártás végrehajtója, vállalathálózat Intelligens Gyártórendszer (IMS) Apróbb/nagyobb hibákat kijavít/kikerül úgy, hogy a munka folytatódjék, amíg lehet (Hatvany J., Nam Suh)
 Nem szimuláció (noha sokan annak tartják), hanem olyan gyártás, amelyben több, más-más helyen lévő, önálló cég vesz részt és készít egy adott terméket, de a vevőnek ehhez nincs köze, nem tud róla. Virtuális (kiterjesztett) vállalat. a virtuális gyártás végrehajtója, vállalathálózat. Intelligens Gyártórendszer (IMS) Apróbb/nagyobb hibákat kijavít/kikerül úgy, hogy a munka folytatódjék, amíg lehet (Hatvany J., Nam Suh)")
29
Néhány fontos fogalom/2
Rugalmas gyártás: a rendszer gazdaságosan tud kicsit-nagyot, forgástestet- prizmatikus alkarészt, keveset-sokat, egyszerűt-összetettet stb. Gyártási hálózatok – és elemeik Hierarchikus (hagyományos: főnök-beosztottak, sok szinten): lefele utasít, felfele jelent Heterarchikus (egyenrangú partnerek, pl. virtuális gyártás céljából): beszélgetnek Holon: önállóan és másokkal összekapcsolva is működőképes (gyártó) egység
: lefele utasít, felfele jelent. Heterarchikus (egyenrangú partnerek, pl. virtuális gyártás céljából): beszélgetnek. Holon: önállóan és másokkal összekapcsolva is működőképes (gyártó) egység")
30
Néhány fontos fogalom/3
Elosztott gyártás Hálózatba kötött üzemek oldják meg a nekik szánt feladatokat Tervezés Gyártás Ellenőrzés Tudáskezelés, döntéstámogatás Stb. SME – KKV (Small-Medium Size Enterprize – Kis- és Közepes Vállalat)
")
31
Tervezés-üzemeltetés
A robotizált rendszerek (pl. gyártórendszerek) jellemzői Nagy méret, sok hardver-szoftver Összetett szerkezet Dinamikus Heurisztikus Nem lineáris Stb. Nincs a tervezéshez matematikai apparátus
 jellemzői. Nagy méret, sok hardver-szoftver. Összetett szerkezet. Dinamikus. Heurisztikus. Nem lineáris. Stb. Nincs a tervezéshez matematikai apparátus")
32
Tervezési-üzemeltetési segédeszközök
Nincs (állapot, output)= f (input, állapot, idő stb.) Sem matrixos, sem differenciálegyenlet, sem más, ami kezelhető lenne, ehelyett Modellezés Szimuláció Mesterséges intelligencia OO és nem OO tervezési módszertanok Hibrid rendszerek
= f (input, állapot, idő stb.) Sem matrixos, sem differenciálegyenlet, sem más, ami kezelhető lenne, ehelyett. Modellezés. Szimuláció. Mesterséges intelligencia. OO és nem OO tervezési módszertanok. Hibrid rendszerek")
33
Robotok/1 A robotika rövid, részleges története/1
Ancient Greeks – már a régi görögök… Al-Jazari, század Abū al-'Iz Ibn Ismā'īl ibn al-Razāz al-Jazarī (1136–1206) (Arabic: )أَبُو اَلْعِزِ بْنُ إسْماعِيلِ بْنُ الرِّزاز الجزري**an Iraqi polymath: a scholar, inventor, mechanical engineer, craftsman, artist, mathematician and astronomer from Al-Jazira, Mesopotamia Book of Knowledge of Ingenious Mechanical Devices, 1206 Leonardo da Vinci, 15. század Kempelen Farkas ( ), sakk-automata Europa, 18. század: fuvolás, mozgó állatok,…
 (Arabic: )أَبُو اَلْعِزِ بْنُ إسْماعِيلِ بْنُ الرِّزاز الجزري**an Iraqi polymath: a scholar, inventor, mechanical engineer, craftsman, artist, mathematician and astronomer from Al-Jazira, Mesopotamia. Book of Knowledge of Ingenious Mechanical Devices, Leonardo da Vinci, 15. század. Kempelen Farkas ( ), sakk-automata. Europa, 18. század: fuvolás, mozgó állatok,…")
34
R2: A robotika rövid, részleges története/2
Közvetlen elődök: tele-operátorok, számjegyvezérlésű (NC) gépek. A tele-operátorok áttételeken keresztül valósították meg pl. a radioaktív anyagok mozgatását. Az 1950-es évek végén Joseph Engelberger és George Devol fejlesztették ki az első hasznos ipari robotokat. Forgalmazásukra Engelberger megalapította az Unimation céget és elnyerte a „robotika atyja” címet.
 gépek. A tele-operátorok áttételeken keresztül valósították meg pl. a radioaktív anyagok mozgatását. Az 1950-es évek végén Joseph Engelberger és George Devol fejlesztették ki az első hasznos ipari robotokat. Forgalmazásukra Engelberger megalapította az Unimation céget és elnyerte a „robotika atyja címet")
35
R3: A robotika rövid, részleges története/3
Az első modern mozgó robot a „Hopkins Beast”volt, ami az 1960-as évek elején épült a John Hopkins Egyetemen. Mintafelismerő hardverrel rendelkezett. Az SRI International (Menlo Park, California) „Shakey”-je volt az első mozgó robot, amelyet mesterséges intelligencia kontrollált. Érzékelőkkel felszerelve és egy problémamegoldó program által vezérelve a robot tájékozódni tudott az SRI termeiben: felhasználva a környezetből érkező-információkat, megfelelő útvonalat dolgozott ki. –1970. 1978 –Texas Instruments Inc. – Speak & Spell – az emberi hang első elektronikus verziója, amit chipen tároltak.
 „Shakey -je volt az első mozgó robot, amelyet mesterséges intelligencia kontrollált. Érzékelőkkel felszerelve és egy problémamegoldó program által vezérelve a robot tájékozódni tudott az SRI termeiben: felhasználva a környezetből érkező-információkat, megfelelő útvonalat dolgozott ki. – –Texas Instruments Inc. – Speak & Spell – az emberi hang első elektronikus verziója, amit chipen tároltak")
36
Robotok/4 Robot – (újra)-programozható manipulátor
Karel Capek, Rossum’s Universal Robots, RUR Isaac Asimov, 1940 1. Robot nem bánthat embert 2. R. végrehajtja az ember utasításait 3. R. védi magát, hacsak nem mond ellent 1-nek, vagy 2-nek Willian Grey Walter, intelligens robot, fényt keres, 1948 AI, mint fogalom - Darthmouth konferencia, 1956 Humanoid robot, Waseda Univ., 1973

37
R4a: A robot fogalma, tulajdonságai
A robot szót a cseh író, Karel Čapek népszerűsítette 1921-ben bemutatott színművével (Rossum’s Universal Robots: R.U.R.). A mű témája az emberiség elembertelenedése egy technikai társadalomban ( Golem). A szépirodalomban és a műszaki, technikai fogalom-körben is általában olyan eszközt, berendezést értenek roboton, amely az ember fizikai és/vagy szellemi munkájához hasonló tevékenységet végez. Aktív mesterséges ágens, aminek környezete a teljes fizikai világ Teljes egészében ember készítette szerkezet. Mozogni tud és több szabadság-fokkal rendelkezik. Tevékenységét részben vagy teljesen önállóan irányítja (autonóm).
. A mű témája az emberiség elembertelenedése egy technikai társadalomban ( Golem). A szépirodalomban és a műszaki, technikai fogalom-körben is általában olyan eszközt, berendezést értenek roboton, amely az ember fizikai és/vagy szellemi munkájához hasonló tevékenységet végez. Aktív mesterséges ágens, aminek környezete a teljes fizikai világ. Teljes egészében ember készítette szerkezet. Mozogni tud és több szabadság-fokkal rendelkezik. Tevékenységét részben vagy teljesen önállóan irányítja (autonóm)")
38
A robotika két okból is kihívást jelentő terület:
• A robotoknak a fizikai világban kell tevékeny- kedniük, ami sokkal bonyolultabb, mint a legtöbb szimulált szoftvervilág. • Olyan hardvert (érzékelőket és beavatkozókat) igényel, amelyek valóban működnek. A robotika a mesterséges intelligencia számos, összetevőjét és alterületét igényelheti.
 igényel, amelyek valóban működnek. A robotika a mesterséges intelligencia számos, összetevőjét és alterületét igényelheti")
39
Robotok/5 Robotalkalmazás Industrial Robotics
Folyamatosan nehéz/veszélyes munkára Ember helyett, ha az ember nem akarja Ember helyett, ha gazdaságosabb Industrial Robotics Ray Goertz: Argonne Natnl. Lab. Távvezérlésű manipulátor radioaktív anyagokhoz, 1948 George Devol, Universal Automation, találmány, 1954 Joseph Engelberger and George Devol, Unimation, első robot a GM fröccsöntő üzemében, New Jersey, 1960 Új ipari robotok száma évente kb Japán (80K), USA (20K), EU (20K),
, USA (20K), EU (20K),")
40
R6: Robotgenerációk I. Generációs robotok: 60-as évek, mozgatásra kifejlesztve. II. Generációs robotok (ipar): 70-es évek, érzékelők-kel vizsgálják környezetüket, tevékenységüket ezek hatására képesek megváltoztatni. III. Generációs robotok (kutatás): jelfeldolgozás, információ kiválasztása, kombinálása. Megjelennek az önálló viselkedési algoritmusok és döntési rendszerek. MI, AI
: 70-es évek, érzékelők-kel vizsgálják környezetüket, tevékenységüket ezek hatására képesek megváltoztatni. III. Generációs robotok (kutatás): jelfeldolgozás, információ kiválasztása, kombinálása. Megjelennek az önálló viselkedési algoritmusok és döntési rendszerek. MI, AI")
41
R7: Csoportosítás – fizikai ágensként
Sok szempont szerint csoportosíthatók: – intelligencia-szint – külső megjelenés (robotkarok, mobil robotok) – pályavezérlés típusa – alkalmazási területek szerint – energiaellátás szerint Megkülönböztetjük a következő robotokat: • mobil (androidok, animatok, ember nélküli járművek, szórakoztató robotok, általános autonóm robotok) • statikus (háztartási és ipari robotok, robotkarok) • mikro-robotok, egyebek, • nano-robotok (fizika, kémia határán).
 – pályavezérlés típusa. – alkalmazási területek szerint. – energiaellátás szerint. Megkülönböztetjük a következő robotokat: • mobil (androidok, animatok, ember nélküli járművek, szórakoztató robotok, általános autonóm robotok) • statikus (háztartási és ipari robotok, robotkarok) • mikro-robotok, egyebek, • nano-robotok (fizika, kémia határán)")
42
Robotok/8 2007 – 6.5 millió robot működött
2011 – 18 millió (??) várható Elegendők/megfelelők Asimov szabályai ? Talán nem Pl ben - szoftver hiba miatt: Egy délafrikai katonai lőgyakorlaton egy Oerlikon GDF-005 robot ágyú megölt 9 katonát és megsebesített 14-et Egy Dvorak típusú robot fűnyírógép megölt egy dán munkást Egy kőgyűjtő robot majdnem leszedte egy svéd munkás fejét. A cég korona büntetést fizetett.
 várható. Elegendők/megfelelők Asimov szabályai Talán nem. Pl ben - szoftver hiba miatt: Egy délafrikai katonai lőgyakorlaton egy Oerlikon GDF-005 robot ágyú megölt 9 katonát és megsebesített 14-et. Egy Dvorak típusú robot fűnyírógép megölt egy dán munkást. Egy kőgyűjtő robot majdnem leszedte egy svéd munkás fejét. A cég korona büntetést fizetett")
43
Robotok/9 Mark Tilden három robot-törvénye
A robot minden körülmények között meg kell védje magát A robot köteles a forrásait beszerezni és fenntartani A robot állandóan köteles jobb forrásokat keresni

44
Robotok/10 Yueh-Hsuan Weng, Chien-Hsun Chen és Chuen-Tsai Sun
Állandóan képesnek kell lennünk az ember-robot interakciót értékelni, és reagálni a való világ bonyolult körülményeire Azonnali defenzív reakciókra van szükségünk a nyelvi alapú és az autonómiából fakadó félreértések kockázatának csökkentésére Egy explicit (határozott) interakciós szabály-rendszerre és jogi keretekre van szükségünk, amiket minden új-generációs robotra használhatunk
 interakciós szabály-rendszerre és jogi keretekre van szükségünk, amiket minden új-generációs robotra használhatunk")
45
Robotok az irodalomban
Jack Williamson: The Humanoids, 1963 Invasion of the robots, 1963 Isaac Asimov: Satisfaction Guaranteed Henry Kuttnar: Piggy Bank Jack Williamson: With Folded Hands Richard Matheson: Brother to the Machine Robert Bloch: Almost Human Lester del Rey: Into Thy Hands Eric Frank Russel: Boomerang

46
irodalom The coming of the robots, 1963 Eando Binder: I, robot, 1938
Lester del Ley: Helen o’Loy, 1938 John Wyndham: The Lost Machine, 1932 Isaac Asimov: Runaround, 1942 Clifford D. Simak: Earth For Inspiration, 1941 Peter Phillips: Lost Memory, 1952 Harl Vincent: Rex, 1934 F. Orlin Tremaine: True Confession, 1939 Raymond Z. Gallun? Derelict, 1935 Michael Fischer: Misfit, 1935

47
Robotok a gyártásban/tegnap-ma
Anyagmozgatás: szerszámgépek és egyéb állomások kiszolgálása, rakodás Öntés, pont-, ívhegesztés, kovácsolás, hőkezelés, préselés, festés Intelligens robotok: nem csak belső erő-nyomaték érzékelőkkel, hanem külső tapintó, látó, halló, szagló érzékelők Szerelés (össze)
")
48
Robotok a gyártásban/ma-holnap
Szerelés (össze-szét) Megmunkálás robotkarra szerelt szerszámokkal (festő, maró, fúró, vágó, sorjázó, stb.) Ellenőrzés Csomagolás, bőr-, textil-kezelés Tisztítás Takarítás Mikro-robot, nano-robot
 Megmunkálás robotkarra szerelt szerszámokkal (festő, maró, fúró, vágó, sorjázó, stb.) Ellenőrzés. Csomagolás, bőr-, textil-kezelés. Tisztítás. Takarítás. Mikro-robot, nano-robot")
49
Robot-típusok, karszerkezetek
• mobil (androidok, animatok, ember nélküli járművek, szórakoztató robotok, általános autonóm robotok) • statikus (háztartási és ipari robotok, robotkarok) • mikro-robotok, egyebek • nano-robotok (fizika, kémia határán). Derékszögű koordinátás kar Hengerkoordinátás kar Gömbkoordinátás kar SCARA (Selective Compliance Assembly Robot Arm) Humanoid kartípus
 • statikus (háztartási és ipari robotok, robotkarok) • mikro-robotok, egyebek. • nano-robotok (fizika, kémia határán). Derékszögű koordinátás kar. Hengerkoordinátás kar. Gömbkoordinátás kar. SCARA (Selective Compliance Assembly Robot Arm) Humanoid kartípus")
50
Alapvető AI technológiák
ANN: Artificial Neural Networks (mesterséges neurális hálók) Genetic algorithms (genetikus algoritmusok) Fuzzy systems Soft computing: a fentiekből 2-3 együtt KBS : Knowledge Based Systems (Tudásalapú rendszer) Expert Systems (ES: szakértő rendszer) Distributed AI (elosztott MI – agensek - holonok) Hibrid-0: KBS plusz Soft computing Hibrid-1: AI és hagyományos programozás Hibrid-2: OO és AI Most betét: 0a - Bevezetés az intelligenciába
 Genetic algorithms (genetikus algoritmusok) Fuzzy systems. Soft computing: a fentiekből 2-3 együtt. KBS : Knowledge Based Systems (Tudásalapú rendszer) Expert Systems (ES: szakértő rendszer) Distributed AI (elosztott MI – agensek - holonok) Hibrid-0: KBS plusz Soft computing. Hibrid-1: AI és hagyományos programozás. Hibrid-2: OO és AI. Most betét: 0a - Bevezetés az intelligenciába")
51
Serious Games / Komoly játékok
Tanulás - Oktatás Gazdasági haszon Szociális haszon Játékprogramok Szimulációk Szakértő programok Oktatók, tanulók, KKVk, tudományos egyesületek, helyi iparkamarák stb

52
CAM-ORIENTÁLT CIM RENDSZER
CAD-Cella CAPP-Cella Maró-esztergáló cella Ethernet/MAP hálózat--WWW AGV&tároló cella Hegesztő cella Irányító számítógép Szerelő cella

53
menedzsment üzem/műhely cellák gyártó berendezések érzékelők UNIX WS
EASYMAP OS2, PC VAX VMS DOS PC EQULIZER REFLEX PLC AB PLC FANUC

54
Hibrid szimuláció

55
G2 alapú tudásbázisú rendszer
SZIMULÁCIÓ OBJEKTUM DEFINICIÓK ÉRTÉ-KELÉS MINŐSÉG BIZT. ÜTEMEZÉS

56
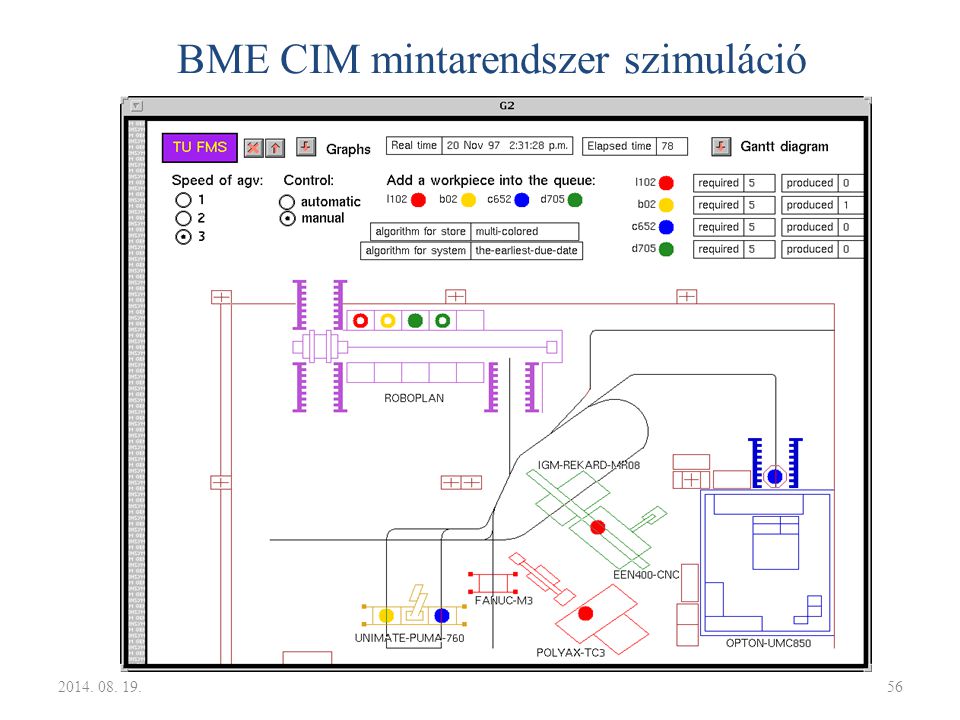
BME CIM mintarendszer szimuláció
57
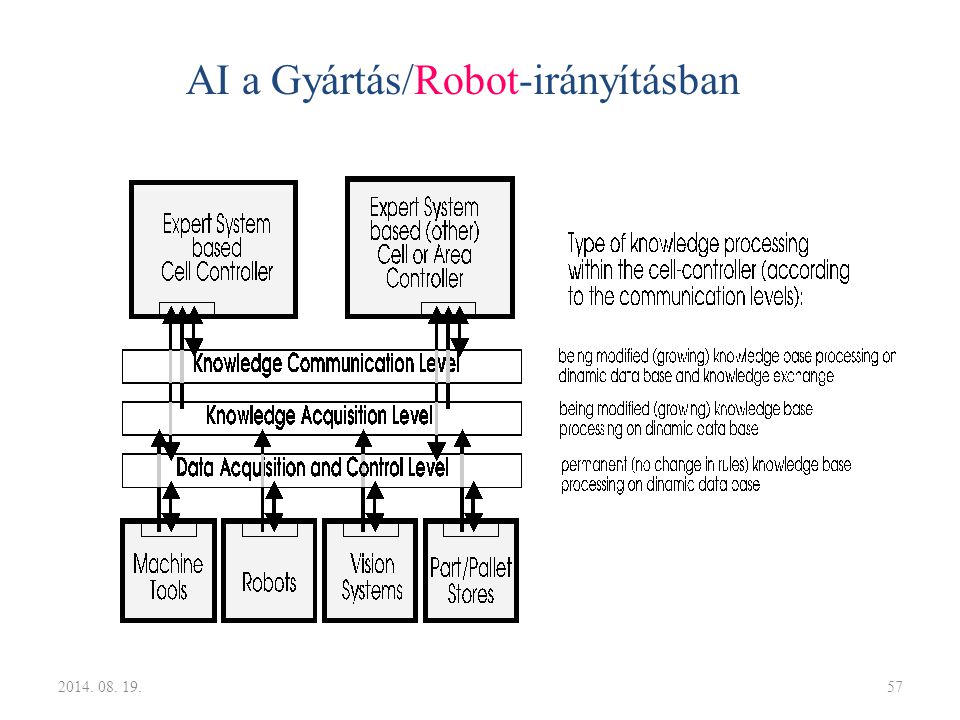
AI a Gyártás/Robot-irányításban
58
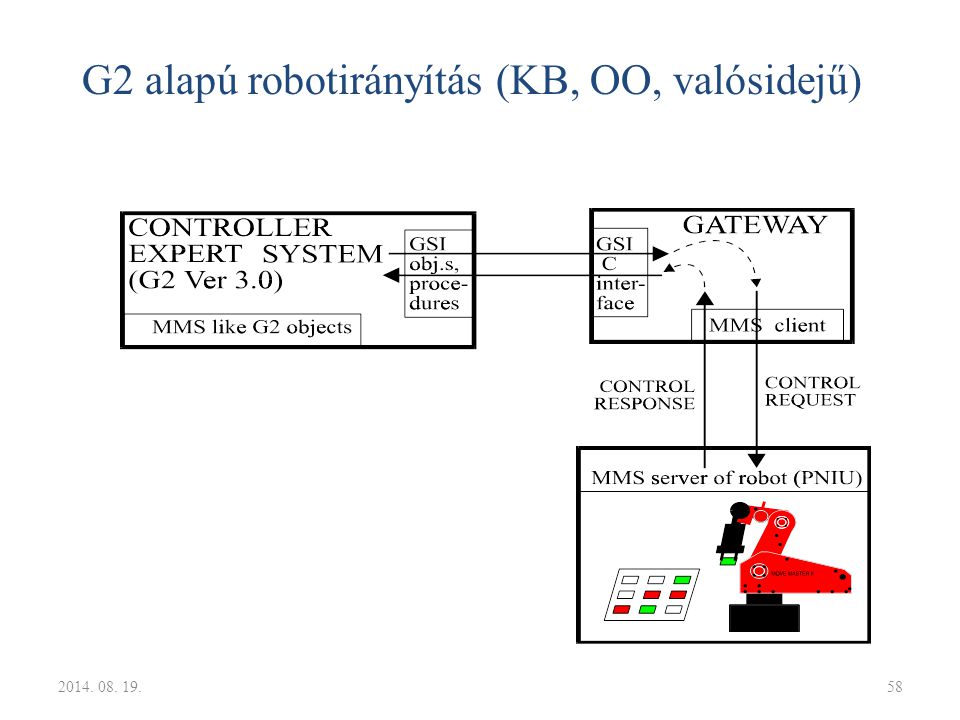
G2 alapú robotirányítás (KB, OO, valósidejű)
59
KÖVETKEZTETÉSEK KÖSZÖNÖM A FIGYELMET !!!
CAD, CAM, CIM, CAPP, CAQ, Caxx, FMS, FMC, TQM, JIT, OO, OOSE, HOOD, OMT, UML, IDEF CIM-OSA, PERA, GRAI, GERAM AI, KBS, ES, ANN, FS, GA, ISO, OSI, MAP, TOP, MMS, IGES, STEP NC, CNC, RoC, DNC, BBQ KÖSZÖNÖM A FIGYELMET !!!

Hasonló előadás






 Námesztovszki Zsolt Újvidéki Egyetem Magyar Tannyelvű Tanítóképző.>")
 technológia lehetőségei a pénzügyi szektorban.>")


 tervezése>")








