Előadást letölteni
Az előadás letöltése folymat van. Kérjük, várjon

1
Az Általános Relativitáselmélet és a GPS elmélete
This presentation will probably involve audience discussion, which will create action items. Use PowerPoint to keep track of these action items during your presentation In Slide Show, click on the right mouse button Select “Meeting Minder” Select the “Action Items” tab Type in action items as they come up Click OK to dismiss this box This will automatically create an Action Item slide at the end of your presentation with your points entered. Az Általános Relativitáselmélet és a GPS elmélete Szondy György Amatőr fizikus, az ELFT tagja 2005. január 17.

2
Bevezető Amatőr fizikus Miért pont gravitáció? Mi a cél?

3
Az előadás tartalma Téridő mérések Műholdas Navigáció (GPS) mérések
Mit mérünk a téridőben és hogyan? Speciális Relativitáselmélet Általános Relativitáselmélet Műholdas Navigáció (GPS) mérések A GPS működése Gravitációs hatások értelmezése a GPS esetén Alternatív (relativisztikus) gravitáció elméletek Miért foglalkozunk velük? Néhány célirányos példa Tanulság?
 mérések. A GPS működése. Gravitációs hatások értelmezése a GPS esetén. Alternatív (relativisztikus) gravitáció elméletek. Miért foglalkozunk velük Néhány célirányos példa. Tanulság")
4
Téridő mérések Mit mérünk a téridőben és hogyan?
Idő (frekvencia) Távolság Fénysebesség Orientáció Tér(-idő) Tömeg (energia)
 Távolság. Fénysebesség. Orientáció. Tér(-idő) Tömeg (energia)")
5
Téridő mérések Mit mérünk a téridőben és hogyan?
Idő (frekvencia) Csillagászati periódusok - Bolygók keringése, föld forgása ... Atomóra - Kiválasztott atomi energiaátmenethez tartozó frekvencia Távolság Méterrúd - Testek (pl. a Föld) fizikai mérete Csillagászati méretek - Nap-Föld távolság Radar elv - A fény segítségével az idő mérésre vezetjük vissza Fénysebesség Mérés - Távolság/idő Definíció - c= m/s
 Csillagászati periódusok - Bolygók keringése, föld forgása ... Atomóra - Kiválasztott atomi energiaátmenethez tartozó frekvencia. Távolság. Méterrúd - Testek (pl. a Föld) fizikai mérete. Csillagászati méretek - Nap-Föld távolság. Radar elv - A fény segítségével az idő mérésre vezetjük vissza. Fénysebesség. Mérés - Távolság/idő. Definíció - c= m/s")
6
Téridő mérések Mit mérünk a téridőben és hogyan?
Tömeg Gravitáció - Kepler pályákból Gyorsítás - Töltött részecske gyorsítása Energia - mc2=hν (feltételezzük, hogy az atomi frekvenciák aránya állandó) Orientáció Csillagok Giroszkóp Téridő Riemann - Távolság és időmérésekkel mérhető Minkowski - Adott, a mérések a mérőeszközt jellemzik
 Orientáció. Csillagok. Giroszkóp. Téridő. Riemann - Távolság és időmérésekkel mérhető. Minkowski - Adott, a mérések a mérőeszközt jellemzik")
7
Téridő mérések Speciális Relativitáselmélet
Nincs gravitáció Jellemzők A fény a koordináta-egyenesek mentén terjed A fény terjedési sebessége állandó (homogén, izotróp) Az órák szinkronizálhatóak az egész térre Kiválasztott inerciarendszer (forgásmentes) Fénnyel szinkronizálunk Lorenz transzformáció Magára hagyott részecske mozgása egynesvonalú egyenletes Magára hagyott részecske (össz)energiája állandó Energiamegmaradás érvényben van Következtetés A téridő Minkowski Az elemi részecskék fizikai tulajdonsága helytől független
 Az órák szinkronizálhatóak az egész térre. Kiválasztott inerciarendszer (forgásmentes) Fénnyel szinkronizálunk. Lorenz transzformáció. Magára hagyott részecske mozgása egynesvonalú egyenletes. Magára hagyott részecske (össz)energiája állandó. Energiamegmaradás érvényben van. Következtetés. A téridő Minkowski. Az elemi részecskék fizikai tulajdonsága helytől független")
8
Téridő mérések Gravitáció
Jellemzők A fény nem a koordináta-egyenesek mentén terjed A fény „koordináta” sebessége nem állandó Az órák NEM szinkronizálhatóak az egész térre Kényszererők/gyorsulás Gravitációs vöröseltolódás (Rebka experiment) Lorenz transzformáció Magára hagyott részecske a koordinátarendszerben gyorsul Magára hagyott részecske mozgási energiája nő Energiamegmaradás – hiszünk benne Szabad paraméterek Fénysebesség Téridő geometriája Elemi részecskék tulajdonsága
 Lorenz transzformáció. Magára hagyott részecske a koordinátarendszerben gyorsul. Magára hagyott részecske mozgási energiája nő. Energiamegmaradás – hiszünk benne. Szabad paraméterek. Fénysebesség. Téridő geometriája. Elemi részecskék tulajdonsága")
9
Téridő mérések Általános Relativitáselmélet
Einstein gravitációelmélete Feltevések A szabadon eső test lokális inerciarendszer Jellemzők A fény (null) geodetikus mentén terjed (fényelhajlás) A fény terjedési sebessége (inerciarendszerben) állandó Gravitációs vöröseltolódás Fénykúpok befelé hajása Problémák az órák szinkronizálásával A szinkronizált vonatkoztatási rendszer nem stacionárius A szinkronizált rendszerben az anyag nincs nyugalomban Magára hagyott részecske geodetikus mentén mozog Koordinátarendszerben gyorsul Magára hagyott részecske (össz)energiája a gravitációs tér rovására nő Következtetés A téridő Riemann Dinamikus (a gyorsulás a metrika hatása)
 geodetikus mentén terjed (fényelhajlás) A fény terjedési sebessége (inerciarendszerben) állandó. Gravitációs vöröseltolódás. Fénykúpok befelé hajása. Problémák az órák szinkronizálásával. A szinkronizált vonatkoztatási rendszer nem stacionárius. A szinkronizált rendszerben az anyag nincs nyugalomban. Magára hagyott részecske geodetikus mentén mozog. Koordinátarendszerben gyorsul. Magára hagyott részecske (össz)energiája a gravitációs tér rovására nő. Következtetés. A téridő Riemann. Dinamikus (a gyorsulás a metrika hatása)")
10
Műholdas Navigáció (Kitérő)
Az általános relativitáselmélet legfontosabb alkalmazása GPS mérések Radar elvű mérések Helymeghatározás műholdak segítségével Mérési hibák Műholdak pályameghatározása Relativisztikus hatások a GPS órák esetén Összevetés az általános relativitáselmélettel

11
Műholdas Navigáció Radar elvű mérések
Radar elv – a távolságmérést időtartam mérésre vezetjük vissza térbeli távolság (számolt érték) dt – a radar jel futási ideje (mért érték) c – a jel terjetdési sebsessége (konstans/definíció) Szükséges eszközök Időmérő (óra) Ideálisan terjedő jel Hibák – korrekció
 dt – a radar jel futási ideje (mért érték) c – a jel terjetdési sebsessége (konstans/definíció) Szükséges eszközök. Időmérő (óra) Ideálisan terjedő jel. Hibák – korrekció")
12
Műholdas Navigáció Radar elvű mérések
Kétirányú mérés (hagyományos radar) A jel futását oda-vissza irányban lemérjük A mérést végző pont aktív Bármely tárgy távolsága mérhető Aktív eszköz mérete Független, önálló mérés
 A jel futását oda-vissza irányban lemérjük. A mérést végző pont aktív. Bármely tárgy távolsága mérhető. Aktív eszköz mérete. Független, önálló mérés")
13
Műholdas Navigáció Radar elvű mérések
Egyirányú mérés (GPS) Két órát használunk A jel futási ideje a jeladótól a vevőig A mérést végző pont passzív (olcsó, miniatürizálható) Globális mérés Szinkronizálás !!! (órák viszonya ) mikor volt legutóbb? milyen jól sikerült? Az adók mennyire vannak szinkronban? Sugárzási ideje mennyire precíz?
 Két órát használunk. A jel futási ideje a jeladótól a vevőig. A mérést végző pont passzív (olcsó, miniatürizálható) Globális mérés. Szinkronizálás !!! (órák viszonya ) mikor volt legutóbb milyen jól sikerült Az adók mennyire vannak szinkronban Sugárzási ideje mennyire precíz")
14
Műholdas Navigáció Helymeghatározás
NAVSTAR – GPS (legismertebb) 1978 első műhold, 1994 teljes funkcionalitás Jellemzők 24 db műhold (21 aktív) 6 különböző pálya Pályamagasság 20,200 km Keringési idő 12 óra Sebesség 11,200 km/h Élettartam > 10 év ~ 1 tonna ~ 5m kinyitott napelemmel Teljesítmény < 50W Sugárzott adatok Epheremis adatok Almanach adatok
 1978 első műhold, 1994 teljes funkcionalitás. Jellemzők. 24 db műhold (21 aktív) 6 különböző pálya. Pályamagasság 20,200 km. Keringési idő 12 óra. Sebesség 11,200 km/h. Élettartam > 10 év. ~ 1 tonna. ~ 5m kinyitott napelemmel. Teljesítmény < 50W. Sugárzott adatok. Epheremis adatok. Almanach adatok")
15
Műholdas Navigáció Helymeghatározás
Feltételezések A műholdak koordinátái ismertek A méréseknél nincsenek zavaró hatások Módszerek Műholdak távolságán alapuló 3 műhold elegendő Tőkéletes szinkronizálás szükséges Távolság-különbségén alapuló 4 műhold kell Nem kell a vevő szinkronban legyen LORAN-C rádió navigáció

16
Műholdas Navigáció Mérési hibák
A mérést befolyásoló tényezők A műhold órájának bizonytalansága (100ns – 30m) A műhold pályahibája A vevő órájának bizonytalansága A referencia állomás hibája Ionoszféra és Troposzféra késleltető hatása Visszaverődések hatása Az adás időpontjának pontossága
 A műhold pályahibája. A vevő órájának bizonytalansága. A referencia állomás hibája. Ionoszféra és Troposzféra késleltető hatása. Visszaverődések hatása. Az adás időpontjának pontossága")
17
Műholdas Navigáció Pályameghatározás
Pályaadatok megadási módjai Koordináták listja az idő függvényében A pálya polinomiális megadása Kezdeti állapot (x,v) megadása, a mozgásegyenlet megoldása Használt koordináta rendszerek Conventional Terrestrial Reference System (CTRS) Pályaadatok megadása Geocentrikus koordinátarendszerben történik Conventional Celestial Reference System (CCRS) A műholdak pályáját globális koordinátarendszerben kell számolni A korrekt transzformáció a koordinátarendzsrek között alapvető fontosságú
 megadása, a mozgásegyenlet megoldása. Használt koordináta rendszerek. Conventional Terrestrial Reference System (CTRS) Pályaadatok megadása Geocentrikus koordinátarendszerben történik. Conventional Celestial Reference System (CCRS) A műholdak pályáját globális koordinátarendszerben kell számolni. A korrekt transzformáció a koordinátarendzsrek között alapvető fontosságú")
18
Műholdas Navigáció Pályameghatározás
Kepler-ellipszis + egyéb gravitációs és nem gravitációs hatások A Föld nem gömbszimmetrikus gravitációs tere A Nap, Hold és egyéb égitestek hatása Atmoszférikus drag A napszél hatása A Föld helyfüggő gravitációs tere (óceánok és szárazföldek hatása)
")
19
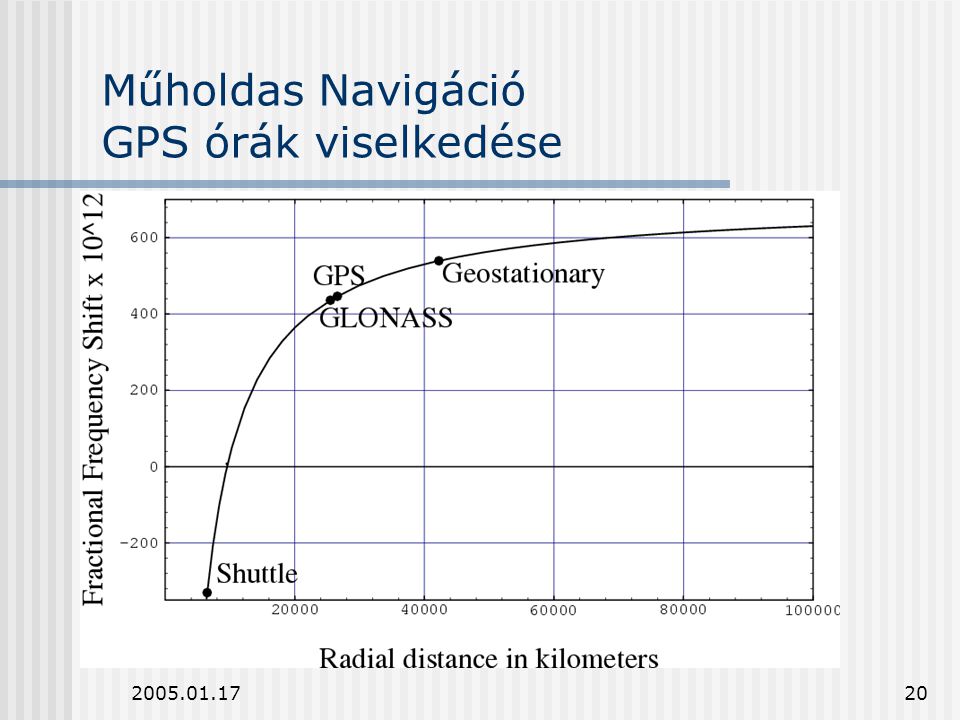
Műholdas Navigáció GPS órák viselkedése
GPS idő Koordináta idő a Földhöz rögzített forgó rendszerben A végtelenben lévő óra ~UTC (Universal Coordinated Time), ugrások nélkül Hatások az óra frekvenciájára Gravitációs potenciál Centripetális potenciál Excentricitás Quadrupole momentum Sebesség Az állandó tagokat a fellövés előtt korrigálják
, ugrások nélkül. Hatások az óra frekvenciájára. Gravitációs potenciál. Centripetális potenciál. Excentricitás. Quadrupole momentum. Sebesség. Az állandó tagokat a fellövés előtt korrigálják")
20
Műholdas Navigáció GPS órák viselkedése
21
Műholdas Navigáció GPS és az Általános Relativitáselmélet
Különbségek Nincs gravitációs vöröseltolódás, az órák frekvenciája függ a gravitációs potenciáltól Az órák szinkronizálhatók - koordinátaidő Magára hagyott részecske gyorsul a gravitációs erő hatására A fény terjedése feltételezés szerint homogén, izotróp A téridő az alkalmazás tartományában közelítőleg Minkowski, a Shapiro késleltetést elhanyagolják (~2 cm)
")
22
Téridő mérések Alternatív gravitációelméletek
Szabad paraméterek Fénysebesség Téridő geometriája Elemi részecskék tulajdonsága

23
Téridő mérések Alternatív gravitációelméletek
Példa: Léggömb-relativitás a definíciók hatása a leírásra GPS Ált. Rel.

24
Alternatív gravitációelméletek Brans-Dicke gravitáció
Skalár-tenzor gravitáció elmélet Mach-elv A gravitációs állandó függ az Univerzum paramétereitől Csak tömegarány mérhető Szabad paraméter: m és G Általános Relativitáselmélet az atomok mért paraméterei (pl. tömeg, atomi frekvencia) függetlenek a helytől G(x) helyfüggő skalár Más megközelítés csírája: m(x)
 függetlenek a helytől. G(x) helyfüggő skalár. Más megközelítés csírája: m(x)")
25
Alternatív gravitációelméletek Dicke féle – Speciális eset
A nyugalmi tömeg állandósága definíció Mi van, ha a nyugalmi tömeg helyfüggő? Hatásfüggvény Mozgásegyenlet A részecskék nem geodetikus pályák mentén mozognak Speciális eset – nincs gravitációs vöröseltolódás A tömeg helyfüggése meghatározható Az összenergia állandó marad (Statikus gravitációs tér)
")
26
Alternatív gravitációelméletek Pontosított Dicke (Lineáris Relativitás)
Skalár-tenzor gravitációelmélet Jellemzők A fény (null) geodetikus mentén terjed A fény terjedési sebessége állandó (homogén, izotróp) Az órák szinkronizálhatóak az egész térre Koordinátaidő – az órák frekvenciája függ a gravitációs potenciáltól Fénnyel szinkronizálunk, nincs gravitációs vöröseltolódás Lorenz transzformáció Magára hagyott részecske a nyugalmitömeg helyfüggés hatására gyorsul Magára hagyott részecske nem mozog geodetikus pályán Energiamegmaradás érvényben van Következtetés A téridő Riemann Lineáris – kvantumelmélethez használható
 geodetikus mentén terjed. A fény terjedési sebessége állandó (homogén, izotróp) Az órák szinkronizálhatóak az egész térre. Koordinátaidő – az órák frekvenciája függ a gravitációs potenciáltól. Fénnyel szinkronizálunk, nincs gravitációs vöröseltolódás. Lorenz transzformáció. Magára hagyott részecske a nyugalmitömeg helyfüggés hatására gyorsul. Magára hagyott részecske nem mozog geodetikus pályán. Energiamegmaradás érvényben van. Következtetés. A téridő Riemann. Lineáris – kvantumelmélethez használható")
27
Alternatív gravitációelméletek Jánossy féle megközelítés
Feltételezések A tér Euklideszi sík A fény sebessége helyfüggő A metrika formája Ererdmények Kvalitativ eredmény helyes Kvantitatív eredmény hibás Fény elhajlás – a helyes érték fele Merkur perihélium elfordulás – a helyes érték 2/3-a

28
Alternatív gravitációelméletek Jánossy féle megközelítés helyesbítése
Probléma Önkényes feltételezés, hogy a részecske mérete állandó Mi a helyes metrika? – lehetséges meggondolások Fényelhajlás helyes legyen Látszólagos tömeg és gravitációs sugár összhangban legyen Kvantumrészecske modell viselkedése Módosított metrika Fény elhajlás – helyes érték Merkur perihélium elfordulás – helyes érték

29
Alternatív gravitációelméletek Jánossy féle megközelítés helyesbítése
Éter(-szerű) elmélet Jellemzők A fény elhajik (optikai törőközeg) A fény terjedési sebessége helyfüggő (optikai törőközeg) Az órák szinkronizálhatóak az egész térre Koordinátaidő – az órák frekvenciája függ a gravitációs potenciáltól Fénnyel szinkronizálunk, nincs gravitációs vöröseltolódás Lorenz transzformáció + törőközeg figyelembevétele Magára hagyott részecske a gyorsul nyugalmitömeg helyfüggés hatására Fénysebesség változás hatására (mozgási energia f(v/c(x))) Energiamegmaradás érvényben van Következtetés A téridő Minkowski
 elmélet. Jellemzők. A fény elhajik (optikai törőközeg) A fény terjedési sebessége helyfüggő (optikai törőközeg) Az órák szinkronizálhatóak az egész térre. Koordinátaidő – az órák frekvenciája függ a gravitációs potenciáltól. Fénnyel szinkronizálunk, nincs gravitációs vöröseltolódás. Lorenz transzformáció + törőközeg figyelembevétele. Magára hagyott részecske a gyorsul. nyugalmitömeg helyfüggés hatására. Fénysebesség változás hatására (mozgási energia f(v/c(x))) Energiamegmaradás érvényben van. Következtetés. A téridő Minkowski")
30
Alternatív gravitációelméletek A Rosen metrika szerepe
A metrika forrása Általános relativitáselmélet: Einstein egyenlet (R=0) Éter-szerű elmélet - skalár elmélet Jó lenne Nem extrém esetben az Einsteinivel azonos Szingularitás mentes Szuperpozíció Optimális függvény – Rosen metrikából ismert exponenciális forma
 Éter-szerű elmélet - skalár elmélet. Jó lenne. Nem extrém esetben az Einsteinivel azonos. Szingularitás mentes. Szuperpozíció. Optimális függvény – Rosen metrikából ismert exponenciális forma")
31
Alternatív gravitációelméletek Előnyök, hátrányok
Méréstechnikai szempontból korrekt Szinkronizált GPS elmélet fogalmirendszerével rokon Hátrányok Statikus esetről szól Retardált „potenciálok” figyelembevételének hiánya Kidolgozatlanság

32
Alternatív gravitációelméletek Áttekintés
Klasszikus gravitáció Lokális jelenségek (Ekvivalencia elv) Kvantumgravitáció Égi Mechanika (Szuperpozíció) HASZNÁLAT ideális területe Részecskefizika KOZMOLÓGIA METRIKA Általános Relativitáselmélet Szingularitás Feketelyuk Nincs Atomic =állandó TÉR: Fénysebesség c = ? IDŐ: Szinkronizáció Atomic = ? Lineáris Relativitás Javított Janossy (Ether-alapú) c = c0 g() Minkowski Van Atomic = 0f() ~Rosen metrika Dicke Konform tranzformáció c = állandó Riemann Tranzformáció GPS Kozmológia Multiverzum elmélet
 Kvantumgravitáció. Égi Mechanika. (Szuperpozíció) HASZNÁLAT. ideális területe. Részecskefizika. KOZMOLÓGIA. METRIKA. Általános Relativitáselmélet. Szingularitás. Feketelyuk. Nincs. Atomic =állandó. TÉR: Fénysebesség. c = IDŐ: Szinkronizáció. Atomic = Lineáris Relativitás. Javított Janossy (Ether-alapú) c = c0 g() Minkowski. Van. Atomic = 0f() ~Rosen metrika. Dicke. Konform tranzformáció. c = állandó. Riemann. Tranzformáció. GPS. Kozmológia. Multiverzum elmélet")
33
Tanulságok Az alterntívák használatban vannak
Méréstechnika, GPS Átjárás lehetséges Az alterntívák célirányos használata előnyös Előnyös tulajdonság kihasználása Kisebb számítási igény Ismert tulajdonságok, korlátok

34
Érdekességek GPS és az éter elmélet
Ronald R. Hutch, NavCom Technology, Inc. egyik alapítója 2002-ben Institute of Navigation (ION) elnöke Az Ether Gauge Physics szerzője Állításai A részecske összenergiája állandó, A magára hagyott részecske a tömegének rovására gyorsul A téridő Minkowski, a Shapiro késleltetést a fénysebesség helyfüggése okozza
 elnöke. Az Ether Gauge Physics szerzője. Állításai. A részecske összenergiája állandó, A magára hagyott részecske a tömegének rovására gyorsul. A téridő Minkowski, a Shapiro késleltetést a fénysebesség helyfüggése okozza")
35
Érdekességek Mi van az eseményhorizonton belül?
A Swarzschild megoldás origóján átmenő sík geometriája megegyezik az alábbi forgási felületével

36
Hivatkozások Gravitáció GPS Referenciák
Landau -Lifsic, Elméleti Fizika II – Klasszikus Erőterek, 1973 Hraskó Péter, Relativitás Elmélet, 2002 Typotex Kiadó C. Brans and R. H. Dicke, Mach’s Principle and a Relativistiv Theory of Gravitation, Phys. Rev (1961) R. H. Dicke, Mach’s Principle and Invariance under Transformation of Units, Phys. Rev (1962) Jánossy Lajos, Relativitás Elmélet a fizikai valóság alapján, 1973 Akadémia Kiadó S. Kaniel and Y. Itin, Gravity on parallelizable manifold, gr-qc/ Szondy Gy, Linear Relativity as the Result of Unit Transformation, physics/ György Szondy, Mathematical Equivalency of ..., gr-qc/ GPS Referenciák Chris Rizos, Principles and Practice of GPS Surveying, Neil Ashby, Relativity in the Global Positioning System,
 R. H. Dicke, Mach’s Principle and Invariance under Transformation of Units, Phys. Rev (1962) Jánossy Lajos, Relativitás Elmélet a fizikai valóság alapján, 1973 Akadémia Kiadó. S. Kaniel and Y. Itin, Gravity on parallelizable manifold, gr-qc/ Szondy Gy, Linear Relativity as the Result of Unit Transformation, physics/ György Szondy, Mathematical Equivalency of ..., gr-qc/ GPS Referenciák. Chris Rizos, Principles and Practice of GPS Surveying, Neil Ashby, Relativity in the Global Positioning System,")
37
Köszönöm a Figyelmüket!
Szondy György

Hasonló előadás














>")




