Előadást letölteni
1
Zajok és fluktuációk fizikai rendszerekben 2009. december 2. Active Delay Implicit szekvencia tanulás

2
Active Delay Cél: A lézer driftjének kompenzálása, minimális hozzáadott jitter A szabályozás teljesítményének vizsgálata (numerikus szimulációk) Megvalósítás (hardver + szoftver) Kérdés: tudjuk-e a lézer zaját saját céljainkra felhasználni Lézer impulzusok: a késleltetés időben nem állandó Drift: lassú, determinisztikus, kompenzálható Jitter: véletlenszerű, előre meg nem jósolható , ?
 Megvalósítás (hardver + szoftver) Kérdés: tudjuk-e a lézer zaját saját céljainkra felhasználni Lézer impulzusok: a késleltetés időben nem állandó Drift: lassú, determinisztikus, kompenzálható Jitter: véletlenszerű, előre meg nem jósolható ,")
3
A szabályozás alapelve

4
Hardver 5 időablak 6 ns szélesség

5
A késleltetés hibájának detektálása

6
Az időablak-detektor lehetséges állapotai

7
A szabályozás elve Egyszerű szabályozás: érzékeny a zavarokra Egyszerű átlagolás: egyensúly körüli oszcilláció A mi ötletünk: adaptív átlagolás: Amíg keressük a kívánt késleltetést: kis átlagok (1-2) Közel a kívánt késleltetéshez: hosszabb átlagolások (3-4) Ha nem történt léptetés egy ideje: átlagolási hossz növelése a jobb pontosság érdekében (10-20) Tulajdonságok Jobb védelem a zavarok ellen A detektálási felbontás növelése (dithering) Rugalmas konfigurálhatóság az aktuális igényeknek megfelelően
 Közel a kívánt késleltetéshez: hosszabb átlagolások (3-4) Ha nem történt léptetés egy ideje: átlagolási hossz növelése a jobb pontosság érdekében (10-20) Tulajdonságok Jobb védelem a zavarok ellen A detektálási felbontás növelése (dithering) Rugalmas konfigurálhatóság az aktuális igényeknek megfelelően")
8
Az átlagolás felhasználása zaj + átlagolás: megnövelt felbontás (dithering)
")
9
A zaj konstruktív szerepe Dithering → felbontás növelése (az időablak szélességénél kisebb különbségek érzékelése) Sztochasztikus rezonancia: a zaj növelheti egy rendszer teljesítményét (a zaj a rendszerből jön) Mutatja a szabályozásunk ezt a jelenséget? Valódi rendszer – nehéz változtatni a paramétereket (jitter) ↓ Numerikus szimulációk
 ↓ Numerikus szimulációk.")
10
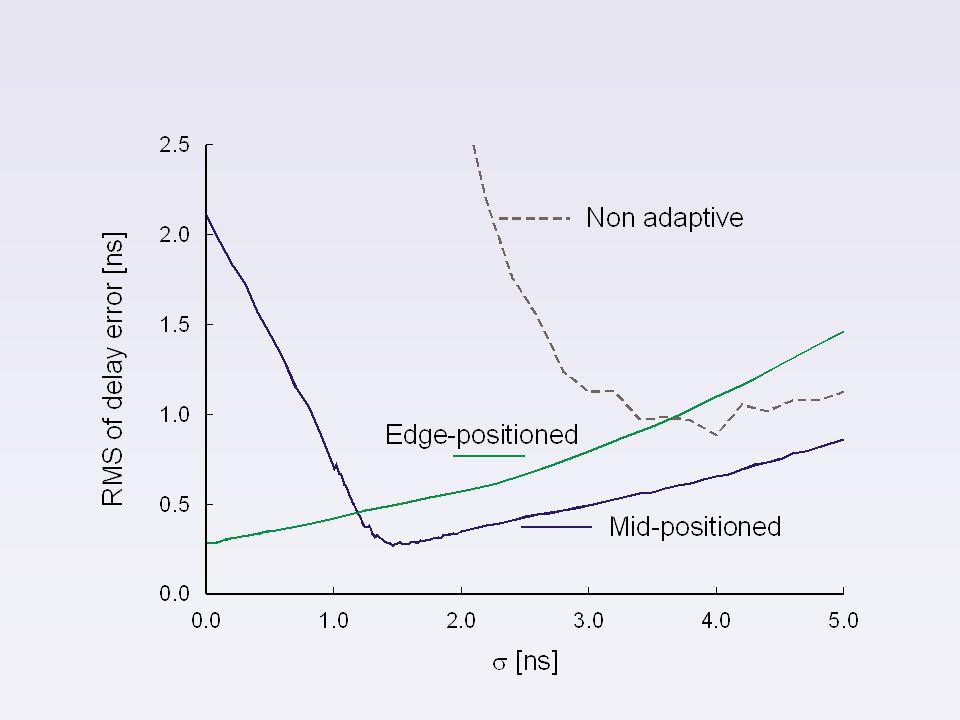
A szabályozás hibája a jitterzaj függvényében

11
Jósági faktor SR jellegű viselkedés

12
Különféle beállítások összehasonlítása

14
A hiba drift követése esetén Szinuszos drift amplitúdó: 40ns periódus: 1000 lövés

15
Demo – no jitter noise

16
Demo – 2 ns jitter noise

17
Demo – 5 ns jitter noise

18
No averaging – 5 ns jitter noise

19
Non adaptive – 1 ns jitter noise

20
Edge positioned – no noise

21
Edge positioned –0.2 ns jitter noise

22
Tracking drift – 2 ns jitter noise

23
Következtetések Működő rendszer (hardver + szoftver) Adaptív átlagolás: jobb teljesítmény védelem a zavarok ellen sztochasztikus rezonancia jellegű viselkedés: nem nulla zaj esetén ideális viselkedés: időablak szélessége: 6 ns jitter zaj RMS: 1.5 ns hiba RMS: 0.25 ns Akár 1 ns/lövés nagyságú dirft követése nagy lépés nélkül
 Adaptív átlagolás: jobb teljesítmény védelem a zavarok ellen sztochasztikus rezonancia jellegű viselkedés: nem nulla zaj esetén ideális viselkedés: időablak szélessége: 6 ns jitter zaj RMS: 1.5 ns hiba RMS: 0.25 ns Akár 1 ns/lövés nagyságú dirft követése nagy lépés nélkül")
24
ISZT

25
Implicit szekvencia tanulás Az ábrához tartozó gombot kell megnyomni a reakcióidő változása utal a tanulásra Cél: motoros tanulás vizsgálata a nélkül, hogy az alany tudatosan tudná kontrollálni A vizsgált szekvenciát el kell rejteni: a nem random sorozatelemek közé random elemek kerülnek Pl: R 1 R 2 R 3 R 4 R 1 R 2 R 3 R 4

26
Nehézségek Általános motoros tanulás: egyre jobb reakcióidő Különbségek az egyes újjak sebessége között Nagy szórás, viszonylag kevés adat

27
Következtetések Az alanyok nem feltétlenül magát a mintát tanulják meg 3 egymás utáni minta: –gyakoribb kombinációk pl. 132 –kevésbé gyakori kombinációk pl. 133 4 egymás utáni minta esetén is különböző gyakoriságú kombinációk Az agyban a különböző folyamatok egymással versenyeznek

28
Demók PCA demó Active Delay

29
Források R Mingesz, Z Gingl, G Almási and P Makra, ‘Utilising jitter noise in the precise synchronization of laser pulses,’ Fluctuations and Noise, 21–24 May 2007, Florence, Italy. In Proceedings of SPIE volume 6600: Noise and fluctuations in circuits, devices and materials, edited by Massimo Macucci &al, SPIE, 2007, 6600 0Z D. Németh, K. Janacsek, Z Londe, M. T. Ullman, D. V. Howard, J. H. Howard, Jr.: ”Sleep has no critical role in implicit motor sequence learning in young and old adults”















>")





, elemet vagy szervet (pl.: jelillesztő,>")