Előadást letölteni
1
Ismeretlen terhelésű szakaszok adaptív szabályozása József K. Tar, Katalin Lőrinc, László Nádai Budapesti Műszaki Főiskola H-1034 Budapest, Bécsi út 96/B. Roland Kovács Knorr-Bremse Vasúti Jármű Rendszerek Hungária Kft., Department of Software Development H-1119 Budapest XI., Major utca 69.

2
Rövid tartalmi vázlat Általában miért érdemes adaptív szabályozókat használni? Milyen típusú adaptív szabályozót érdemes választani? A szakasz matematikai/fizikai modellje ( Merev test, melyhez dinamikailag csatolva vannak nem modellezett belső szabadsági fokok is ) Számítási eredmények Következtetések
 Számítási eredmények Következtetések.")
3
Precíz analitikus modell: Bonyolult Sok esetben gyakorlatilag (néha elvileg is) identifikálhatatlan, vagy nagyon nehezen identifikálható Precíz analitikus modell: Bonyolult Sok esetben gyakorlatilag (néha elvileg is) identifikálhatatlan, vagy nagyon nehezen identifikálható Soft Computing Modellek: Többváltozós folytonos függvények Kolmogorov 1957-es tételén alapuló univerzális közelítésein alapulnak; A dimenzionalitás átkától (rossz skálázhatóság) szenvednek [Weierstrass’ példája sehol sem differenciálható, mindenütt folytonos függvényre 1872.] Soft Computing Modellek: Többváltozós folytonos függvények Kolmogorov 1957-es tételén alapuló univerzális közelítésein alapulnak; A dimenzionalitás átkától (rossz skálázhatóság) szenvednek [Weierstrass’ példája sehol sem differenciálható, mindenütt folytonos függvényre 1872.] Általában miért érdemes adaptív szabályozókat használni? A modellezési nehézségek miatt precíz modell helyett kényelmesebb az adaptív szabályozás!
![Precíz analitikus modell: Bonyolult Sok esetben gyakorlatilag (néha elvileg is) identifikálhatatlan, vagy nagyon nehezen identifikálható Precíz analitikus modell: Bonyolult Sok esetben gyakorlatilag (néha elvileg is) identifikálhatatlan, vagy nagyon nehezen identifikálható Soft Computing Modellek: Többváltozós folytonos függvények Kolmogorov 1957-es tételén alapuló univerzális közelítésein alapulnak; A dimenzionalitás átkától (rossz skálázhatóság) szenvednek [Weierstrass’ példája sehol sem differenciálható, mindenütt folytonos függvényre 1872.] Soft Computing Modellek: Többváltozós folytonos függvények Kolmogorov 1957-es tételén alapuló univerzális közelítésein alapulnak; A dimenzionalitás átkától (rossz skálázhatóság) szenvednek [Weierstrass’ példája sehol sem differenciálható, mindenütt folytonos függvényre 1872.] Általában miért érdemes adaptív szabályozókat használni.](http://images.slideplayer.hu/8/2232745/slides/slide_3.jpg "A modellezési nehézségek miatt precíz modell helyett kényelmesebb az adaptív szabályozás!.")
4
Milyen adaptív szabályozót használjunk ? Klasszikus megközelítés Lyapunov II. módszere (1892). Klasszikus megközelítés Lyapunov II. módszere (1892). Nemautonóm dinamikai rendszerek szabályozásában széles körben használt; Inkább „művészet”, mint könnyen algoritmizálható módszer Nagy gyakorlatot és jó intuíciót kíván. Nem igényli a csatolt nemlineáris differenciálegyenlet rendszerek megoldásának ismeretét. Helyette normabecslésekre épül az adott ábra szerint. Александр Михайлович Ляпунов 1857 –1918
. Klasszikus megközelítés Lyapunov II. módszere (1892). Nemautonóm dinamikai rendszerek szabályozásában széles körben használt; Inkább „művészet , mint könnyen algoritmizálható módszer Nagy gyakorlatot és jó intuíciót kíván. Nem igényli a csatolt nemlineáris differenciálegyenlet rendszerek megoldásának ismeretét. Helyette normabecslésekre épül az adott ábra szerint. Александр Михайлович Ляпунов 1857 –1918.")
5
Az új geometriai megközelítés: A szabályozási feladat átalakítása kontraktív leképezés fixpontjának keresésévé. A szabályozási algoritmus megfelel a fixponthoz konvergáló sorozat alkalmazásának. g(x) xd(tn)xd(tn) x 0 =x d (t 0 ) xnxn xnxn
 xd(tn)xd(tn) x 0 =x d (t 0 ) xnxn xnxn.")
6
A konvergencia elégséges feltétele: Kontraktív leképezés Banach Térben x * környezetében álljon fent! Az {x n } sorozatnak konvergálnia kell egy c határértékhez:

7
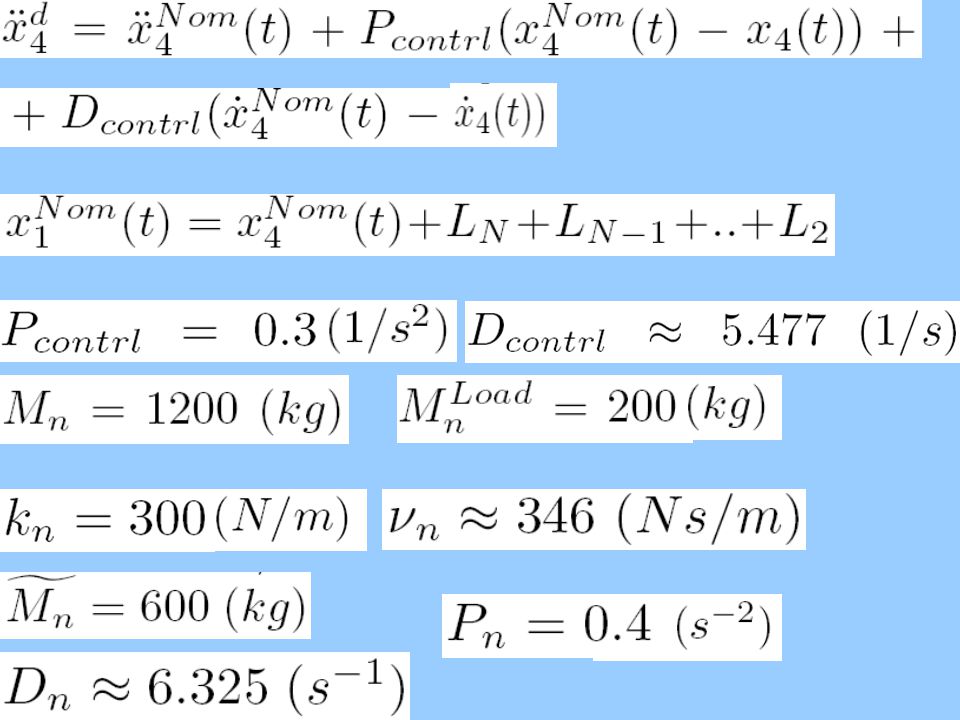
A kocsi-teher kapcsolatot csillapított rugók modellezik. A szabályozó nem ismeri a terheket, a kocsi egyéb adatairól közelítő ismeret van. „Virtuális csillapított rugókkal összekötött merev testek vonata: az előző kocsi automatikus követése; Az 1. kocsi mozgását kinematikailag írjuk elő az utolsó kocsira kiszabott nominális pálya alapján. A szakasz matematikai modellje Az utolsókocsi gyorsulása (4. kocsi): hn(x)hn(x)
: hn(x)hn(x).")
9
Számítási eredmények A eset: nem adaptív távolság-és sebességkövetés B eset: nem adaptív gyorsuláskövetés C eset: adaptív távolság-és sebességkövetés Vizsgált esetek. Nominális mozgás. D eset: adaptív gyorsuláskövetés

10
A eset: nem adaptív távolság-és sebességkövetés B eset: nem adaptív gyorsuláskövetés C eset: adaptív távolság-és sebességkövetés D eset: adaptív gyorsuláskövetés A legjobb!!

11
A eset: nem adaptív távolság-és sebességkövetés B eset: nem adaptív gyorsuláskövetés C eset: adaptív távolság-és sebességkövetésD eset: adaptív gyorsuláskövetés A legjobb!!

12
A eset: nem adaptív távolság-és sebességkövetés B eset: nem adaptív gyorsuláskövetés C eset: adaptív távolság-és sebességkövetésD eset: adaptív gyorsuláskövetés A legjobb!!

13
A eset: nem adaptív távolság-és sebességkövetés B eset: nem adaptív gyorsuláskövetés C eset: adaptív távolság-és sebességkövetésD eset: adaptív gyorsuláskövetés A legjobb!!

14
A eset: nem adaptív távolság-és sebességkövetés B eset: nem adaptív gyorsuláskövetés C eset: adaptív távolság-és sebességkövetésD eset: adaptív gyorsuláskövetés A legjobb!!

15
A eset: nem adaptív távolság-és sebességkövetés B eset: nem adaptív gyorsuláskövetés C eset: adaptív távolság-és sebességkövetésD eset: adaptív gyorsuláskövetés A legjobb!!

16
A eset: nem adaptív távolság-és sebességkövetés B eset: nem adaptív gyorsuláskövetés C eset: adaptív távolság-és sebességkövetésD eset: adaptív gyorsuláskövetés A legjobb!!

17
A eset: nem adaptív távolság-és sebességkövetésB eset: nem adaptív gyorsuláskövetés C eset: adaptív távolság-és sebességkövetésD eset: adaptív gyorsuláskövetés A legjobb!!

18
A szimulációs eredmények szerint Az „adaptív pozíció- és sebességkövetés” és az „adaptív gyorsuláskövetés” egymással összemérhető, szép eredményeket adott. A telítődéses nemlinearitások fontos szerepet játszanak a nem adaptív esetekben, és jól kezeli őket az adaptív módszer, amely konvergens tud maradni az adott paraméter-beállításnál. Más típusú kocsi-teher kapcsolat (pl. dinamikus súrlódással) vizsgálata is indokolt a jövőben. Következtetések Köszönöm szépen a figyelmet!!!
 vizsgálata is indokolt a jövőben. Következtetések Köszönöm szépen a figyelmet!!!.")













, elemet vagy szervet (pl.: jelillesztő,>")






 regresszió (4. fejezet)>")