Előadást letölteni
1
Robottechnika

2
Robot általános fogalma
A robotok előhírnökei az önműködő szerkezetek (automaták) voltak. "Író fiú", egy svájci órás műve 1772-ből, mely karszerkezet segítségével képes volt tollal papírra írni. 1893-ban, Amerikában már beépített gőzgép által hajtott lépegető készült. A XX. században munkára fogják az automatákat. Vezérlésük eleinte mechanikus, majd elektromechanikus, később elektronikus. A "robot" megnevezés Karel Capek cseh írótól származik, aki egy színművében a szláv robota, azaz munka szóból származtatta azon gépezetek nevét, melyek fellázadtak az emberek ellen, s átvették a hatalmat a földön. Az első robot sorozatgyártás 1959-ben indul ben már játékgyártók kínálnak tanítható, mikroprocesszor vezérlésű játékrobot építőszettet.
 voltak. Író fiú , egy svájci órás műve 1772-ből, mely karszerkezet segítségével képes volt tollal papírra írni ban, Amerikában már beépített gőzgép által hajtott lépegető készült. A XX. században munkára fogják az automatákat. Vezérlésük eleinte mechanikus, majd elektromechanikus, később elektronikus. A robot megnevezés Karel Capek cseh írótól származik, aki egy színművében a szláv robota, azaz munka szóból származtatta azon gépezetek nevét, melyek fellázadtak az emberek ellen, s átvették a hatalmat a földön. Az első robot sorozatgyártás 1959-ben indul ben már játékgyártók kínálnak tanítható, mikroprocesszor vezérlésű játékrobot építőszettet.")
3
A robotok definíciójánál és osztályozásánál három szempontot fogadnak el általánosan:
teljes egészében ember által készített szerkezetek, mozogni tudnak, a mozgásban több szabadságfokkal rendelkeznek (mobilitás), tevékenységüket részben, vagy teljesen önállóan irányítják (autonómia). Definíció: emberi feladatokat kivitelező, élőlény (de általában nem ember) formájú fizikai ágensek. Nem hollywoodi szörnyek, nem humanoidok.
, tevékenységüket részben, vagy teljesen önállóan irányítják (autonómia). Definíció: emberi feladatokat kivitelező, élőlény (de általában nem ember) formájú fizikai ágensek. Nem hollywoodi szörnyek, nem humanoidok.")
4
Robotgenerációk I. generáció: kizárólag vezérléssel működtethetők, a számítógép programja adja meg mozgásuk útvonalát, határozza meg az elvégzendő tevékenységeket. A környezet változásait nem érzékelik. II. generáció: környezetüket szenzorokkal vizsgálják, az így szerzett és a saját működésükről nyert információk alapján a számítógép bármikor képes módosítani a robot mozgását, például kikerüli a váratlanul útjába került akadályokat. Feladataikat magas szintű programnyelven határozzák meg. III. generáció: mesterséges intelligencia térhódítása: jól alkalmazkodnak a környezet változásaihoz, alakokat és helyzeteket ismernek fel, hanggal is vezérelhetők, amire képesek hanggal válaszolni, önálló döntéseket hoznak, bonyolult feladatokat oldanak meg, alkalom adtán maguktól módosítják a betáplált programot. Segítségükre vannak tanuló algoritmusaik; általuk hasznosítják korábbi tapasztalataikat. IV. generáció: ???

5
Első generációs robotok modellje
Külső vezérlés Pl. útvonal, elvégzendő tevékenységek Első generációs robot Belső modell Bemenet Kimenet emberi. előre programozott parancsvégrehajtás paraméterek Fix és korlátozott

6
Második generációs robotok modellje
Külső vezérlés magasszintű feladatmeghatározás Második generációs robot Belső modell Bemenet Kimenet környetezetből szenzoradatok külső változásokra reagáló feladatvégrehajtás saját működésről nyert információk korlátozott mértékben, de módosítható

7
Harmadik generációs robotok modellje
Külső vezérlés változtatnak a feladatvégrehajtás módján önálló döntés magasszintű, komplex feladatmeghatározás Harmadik generációs robot Belső cél, terv Belső modell Bemenet Kimenet környezeti, alak- és helyzetinformációk (hang is) külső-belső változásokra reagáló feladatvégrehajtás saját tevékenység hatásáról nyert információk új információk beintegrálása jelentős mértékben változtatható tanuló algoritmusok
 külső-belső változásokra reagáló feladatvégrehajtás. saját tevékenység hatásáról nyert információk. új információk beintegrálása. jelentős mértékben változtatható. tanuló algoritmusok.")
8
Mobilitás és autonómia
Három környezettípus: levegő/világűr víz szárazföld Autonómia feltételei: környezetről való információszerzés, emberi beavatkozás nélküli folyamatos munkavégzés, emberi segítség nélküli helyváltoztatás A pontról B pontra, emberekre, tárgyakra, saját magára veszélyes szituációk elkerülése, saját maga megjavítása külső beavatkozás nélkül.

9
A várható fejlődés

10
A világ robotpiaca

11
Otthoni és szolgáltató robotok 1995-2025

12
Ipari robot fogalma Az emberi mozgásformákkal végrehajtható vagy ahhoz hasonló feladatok elvégzésére alkalmas gép. Az ipari robot mechatronikai (mechanikai-elektromos-elektronikai) szerkezet, amely: nyílt kinematikai láncú mechanizmust és intelligens vezérlést tartalmaz, irányított mozgásokra képes automatikus működésre képes előírt, programozható feladatokat végez
 szerkezet, amely: nyílt kinematikai láncú mechanizmust és. intelligens vezérlést tartalmaz, irányított mozgásokra képes. automatikus működésre képes. előírt, programozható feladatokat végez.")
14
Az ipari robot szerkezetileg
három fő részre osztható Megfogó vagy műveletvégző Kar Csukló

15
A feladatvégzés helyét éri el vele a robot.
Robotkar A feladatvégzés helyét éri el vele a robot. A robotkar leggyakrabban 4db részből és ennek megfelelően 3db ízületből áll. A robotkar ízületei alapvetően kétfajta mozgást végezhetnek: Egyenes vonalú mozgás (csúszó-ízület, Transzláció) Elforduló mozgás (forgóízület, Rotáció) R T
 Elforduló mozgás (forgóízület, Rotáció) R. T.")
16
Kettős- hengeres munkaterű
Három ízülettel rendelkező robotkar összesen 8db változatban készülhet, de ezek közül csak 5db fő megoldás terjedt el: Robotkar típusok TTT RTT TRR RRT RRR Kettős- hengeres munkaterű Gömb- koordinátás Hasáb munkaterű Hengeres munkaterű Csuklós Szerkezeti felépítés Munkaterület

17
Néhány robotjellemző Szabadsági fok : 4 Max. hasznos terhelés :3 kg
Robot tömege : 24 kg Ismétlési pontosság : +/ mm Szabadsági fok : 6 Max. hasznos terhelés :6 kg Megfogóval elérhetõ tartomány :781 mm Max sebesség : 9300 mm/s Robot tömege : 49 kg Ismétlési pontosság : +/-0.02 mm

18
Négy vagy több izülettel rendelkező robotkarok
Munkaterük egy adott pontját - ízületeik helyzeteinek sok (végtelen sok) kombinációjával elérhetik. Ideálisak bonyolult alakzatok szereléséhez (pl. karosszéria-hegesztés) Mozgáspályáikhoz szükséges számítások bonyolultabbak.
 kombinációjával elérhetik. Ideálisak bonyolult alakzatok szereléséhez (pl. karosszéria-hegesztés) Mozgáspályáikhoz szükséges számítások bonyolultabbak.")
19
ROBOTCSUKLÓ Biztosítja - a robotkar által elért helyen - a tetszőleges térbeli irányból történő feladatvégzést. Általában három forgó-ízület biztosítja a tetszőleges térbeli orientációt. Megfogó szerkezet RPY mechanikai elektromágneses pneumatikus Euler

20
Erő- és nyomatékérzékelés
Érzékelési feladatok Helyzetmérés Reszolver Optikai inkrementális kódtárcsa Erő- és nyomatékérzékelés Nyúlásmérő bélyegek alkalmazása az erők hatására torzuló felületeken Tapintásérzékelés Közvetlen kontaktussal (kapcsoló) Nyomásérzékelővel Sebességérzékelés Általában a helyzetérzékelők jeleinek változási sebességéből származtatják
 Nyomásérzékelővel. Sebességérzékelés. Általában a helyzetérzékelők jeleinek változási sebességéből származtatják.")
21
Végrehajtószervek Tárcsamotor Hidraulikus Nagy erő/nyomaték
Áttétel nem szükséges Robbanás-biztos Precíz pozícionálás körülményes Pneumatikus Egyszerű felépítés Táplevegő kell hozzá Villamos Könnyű illeszthetőség, kefés gépeknél szikrázás - robbanásveszély Motor típusok: Kefés egyenáramú motor Kefenélküli egyenáramú motor Tárcsamotor Aszinkron motor Léptetőmotor Tárcsamotor

22
Közlőművek Fogaskerék-áttételek Hullámhajtómű Fogaskerék-fogasléc Szíjhajtás Orsó-anya pár Hullámhajtómű Hullámgenerátor (elliptikus tengely) Hullámkerék (rugalmas) Gyűrűkerék
 Hullámkerék. (rugalmas) Gyűrűkerék.")
23
Robot irányítórendszer
Az irányítórendszer egyrészt parancsokat küld a robot egyes ízületi végrehajtó szerveinek – másrészt kapcsolatot tart fenn a robot feladatát meghatározó külső vezérlőkkel, számítógéppel, más hasonló eszközökkel. Az irányítórendszer egyszerűbb esetben lehet egy egykártyás mikroszámítógép, de bonyolultabb esetben egy többprocesszoros, osztott intelligenciájú rendszer is. mP mP mP mP

24
A mozgatási lehetőségek szerint három alapesetet különböztetünk meg:
pontvezérlés a szerszámot az egyik pontból a másikba mozgatva a mozgás pályája nem írható elő, csak a végpont elérése garantált. A szerszám csak a végpontokban végezhet megmunkálást. B ? A

25
A mozgatási lehetőségek szerint három alapesetet különböztetünk meg:
szakaszvezérlés A szerszám a koordinátatengelyek mentén precízen, adott sebességgel mozgatható egyik pontból a másikba, miközben megmunkálást is végezhet. C megmunkálás megmunkálás A B

26
A mozgatási lehetőségek szerint három alapesetet különböztetünk meg:
pályavezérlés a szerszám előírt sík- vagy térgörbe mentén, adott sebességgel mozgatható. A gépek legtöbbje az előírt pályát egyenes és körív szakaszokkal közelíti. B közben megmunkálás adott sebességgel A Pályavezérlés esetén az interpolátor feladata a megfelelő mozgáshoz szükséges tengelyenkénti alapjelek előállítása.

27
Robotok programozása Robotvezérlők Kézi vezérlő
Mozgások betanítása (online) A programozás ideje alatt szükség van a robotra. Kézi vezetéssel A robotot kézzel mozgatva – annak érzékelői érzékelik a mozgásokat és a robot elraktározza ezeket a későbbi használathoz. Kézi vezérlővel Mozgások tervezése számítógéppel (offline) Személyi számítógéppel interaktív, könnyen használható programok és robot-programnyelvek segítségével tervezhetjük meg a mozgássorokat a robot használata nélkül. A programozás ideje alatt nincs szükség a robotra. Robotvezérlők Kézi vezérlő
 A programozás ideje alatt szükség van a robotra. Kézi vezetéssel. A robotot kézzel mozgatva – annak érzékelői érzékelik a mozgásokat és a robot elraktározza ezeket a későbbi használathoz. Kézi vezérlővel. Mozgások tervezése számítógéppel (offline) Személyi számítógéppel interaktív, könnyen használható programok és robot-programnyelvek segítségével tervezhetjük meg a mozgássorokat a robot használata nélkül. A programozás ideje alatt nincs szükség a robotra. Robotvezérlők. Kézi vezérlő.")
28
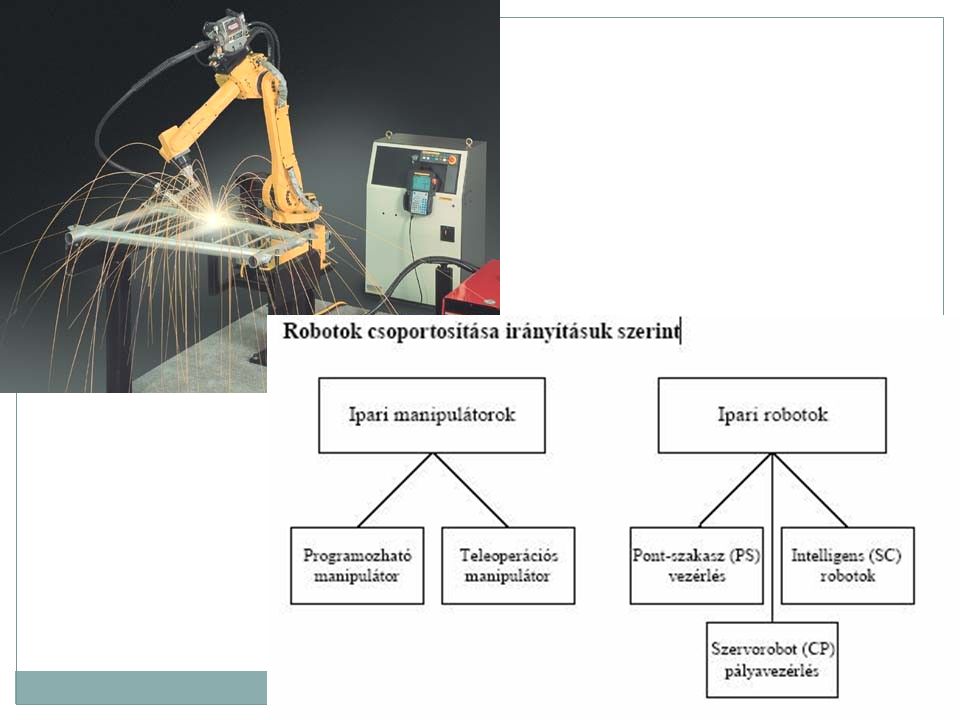
Ipari robotok felhasználásának céljai:
Munkaerő-költségek csökkentése Termelékenység növelése Egyenletes minőségszint biztosítása Veszélyes környezetben az ember mellőzése Ipari robotok felhasználási területei: Szerelőrobotok Hegesztőrobotok Festőrobotok „Tiszta” robotok – nagy tisztaságot kívánó műveletekhez Tudományos munkákban használt robotok Kutatórobotok Biztonsági robotok (pl. tűzszerészet) …
 …")