Előadást letölteni
1
NYME Informatikai Intézet Számítógépes alkalmazások
Kalmár János 6. előadás

2
Tartalom NYME Informatikai Intézet Tárgy : Számítógépes alkalmazások
A virtuális tervezés és gyártás folyamatábrája A tervezés automatizálásának története A CAD hatékonyságának összetevői Az alkatrészek geometriai modellezése Az alkatrészmodell elemei A geometriai modell elemei Testmodellezési megszorítások Felületek létrehozása A „reverse engineering" elve és alkalmazásai Letapogatási stratégiák A CAD modell javítását indikáló információk A CAE, a számítógépes analízis és szimuláció eszközei és módszerei Véges elemek hálója (finite element method) A technológiai tervezés szintjei és feladatai A szerszámgép és robotvezérlések alapfeladatai Az ipari robotok definíciója és alkotóegységei A robot programozás három fajtája
 A technológiai tervezés szintjei és feladatai. A szerszámgép és robotvezérlések alapfeladatai. Az ipari robotok definíciója és alkotóegységei. A robot programozás három fajtája.")
3
Virtuális tervezés és gyártás

5
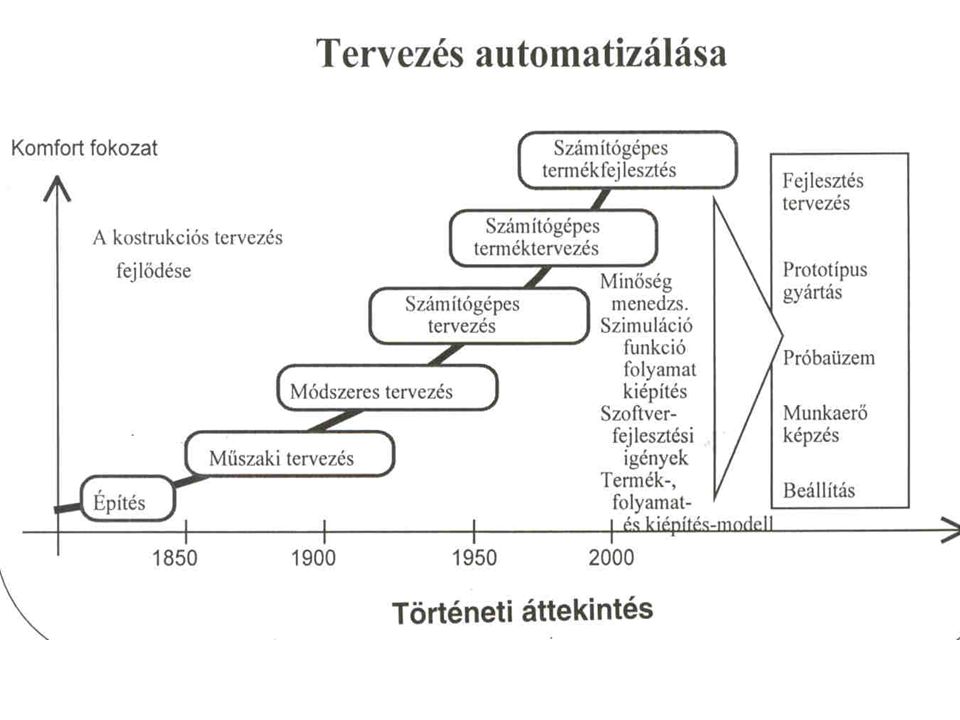
CAD története • Ivan Sutherland (MIT) tekinthető a számítógépes grafika a CAD rendszerek „atyjának” • MIT fejlesztési projekt 1963, a számítógépes rajztábla Sketchpad” kifejlesztése • 60’ –as évek végére 2D és 3D rajzolásra volt lehetőség, USA-ban 200 CAD munkaállomás (UNIX) 1970-es évek: • megjelenik a testmodellezés • A modelleknek felülete van és analizálhatók a számítógép segítségével • 12,000 CAD munkaállomás az USA-ban. 1980-as évek: • PC-k népszerűsége és teljesítőképessége a mikroprocesszorok révén jelentősen megnő. • RISC –(Redukált utasításkészletű) processzorok nagyobb feldolgozási sebességet tesznek lehetővé. • Mérnöki munkaállomások, • mainframe számítógépek
 1970-es évek: • megjelenik a testmodellezés. • A modelleknek felülete van és analizálhatók a számítógép segítségével. • 12,000 CAD munkaállomás az USA-ban as évek: • PC-k népszerűsége és teljesítőképessége a mikroprocesszorok révén jelentősen megnő. • RISC –(Redukált utasításkészletű) processzorok nagyobb feldolgozási sebességet tesznek lehetővé. • Mérnöki munkaállomások, • mainframe számítógépek.")
6
CAD története 1990-es évek:
• parametrikus, feature alapú testmodellezés • Szoborfelületek modellezése • NURBS felületek • Hálózati számítógép rendszerek. 2000-es évek: • parametrikus, feature alapú felületmodellezés • Jelentős koncentrálódás a rendszerek számát illetően • Webcad

7
NYME Informatika Intézet
Tárgy : Számítógépes alkalmazások E rendszerek elterjedése, hatékonyságuk főképpen a következőkkel magyarázható : a minőségi szellemi munkát jelentő tervezést mentesítik az automatizálható rutinfeladatoktól a tervek módosítása e rendszerekkel jóval kisebb ráfordítással, kevesebb hibával elvégezhető nem kell költséges prototípusokat megépíteni, a tervek szimulációval jól tesztelhetők az újabb CAD rendszerek lehetővé teszik a megtervezett objektumok valósághű, foto minőségű megjelenítését is. Ez javítja a megrendelő és a tervező kommunikációját. Például egy megtervezett házat a megrendelő 3D szimulációval "bejárhat", megnézhet, az épület valós természeti környezetben is elhelyezhető.

8
Alkatrészek geometriai modellezése
NYME Informatika Intézet Tárgy : Számítógépes alkalmazások Alkatrészek geometriai modellezése modellezés input adatai (konstrukciós vázlat műhelyrajz, ...) 2D és 3D drótváz, felület és testmodellek. alaksajátosság alapú alkatrészmodellek modellrekonstrukciós módszerek és eszközök felületek, testek valósághű megjelenítése, animáció adatcsere eszközei (interface-k: DXF, IGES, VDA-FS, SAT, STEP) dokumentáció és rajzkészítés modellezési példák
 2D és 3D drótváz, felület és testmodellek. alaksajátosság alapú alkatrészmodellek. modellrekonstrukciós módszerek és eszközök. felületek, testek valósághű megjelenítése, animáció. adatcsere eszközei (interface-k: DXF, IGES, VDA-FS, SAT, STEP) dokumentáció és rajzkészítés. modellezési példák.")
9
Alkatrészmodell elemei
NYME Informatika Intézet Tárgy : Számítógépes alkalmazások Alkatrészmodell elemei Technológiai modell méret, tűrés (szerszámgép hibák stb.) felületi érdesség (él geometria, rezgések ...) hullámosság (deformáció, lengések ...) alakeltérések (egyenesség, síklapuság..> deformáció) irányhiba (párhuzamosság, merőlegesség, szöghiba ...) pozíció (koncentrikusság, egytengelyűség ...) ütés (radiális, axiális szög > mozgások, gépmerevség) Anyagmodell keménység szilárdság ütőmunka rugalmassági modulus poisson tényező Geometriai modell drótváz test felület features
 felületi érdesség (él geometria, rezgések ...) hullámosság (deformáció, lengések ...) alakeltérések (egyenesség, síklapuság..> deformáció) irányhiba (párhuzamosság, merőlegesség, szöghiba ...) pozíció (koncentrikusság, egytengelyűség ...) ütés (radiális, axiális szög > mozgások, gépmerevség) Anyagmodell. keménység. szilárdság. ütőmunka. rugalmassági modulus. poisson tényező. Geometriai modell. drótváz. test. felület. features.")
10
Munkadarab geometriai modell elemei
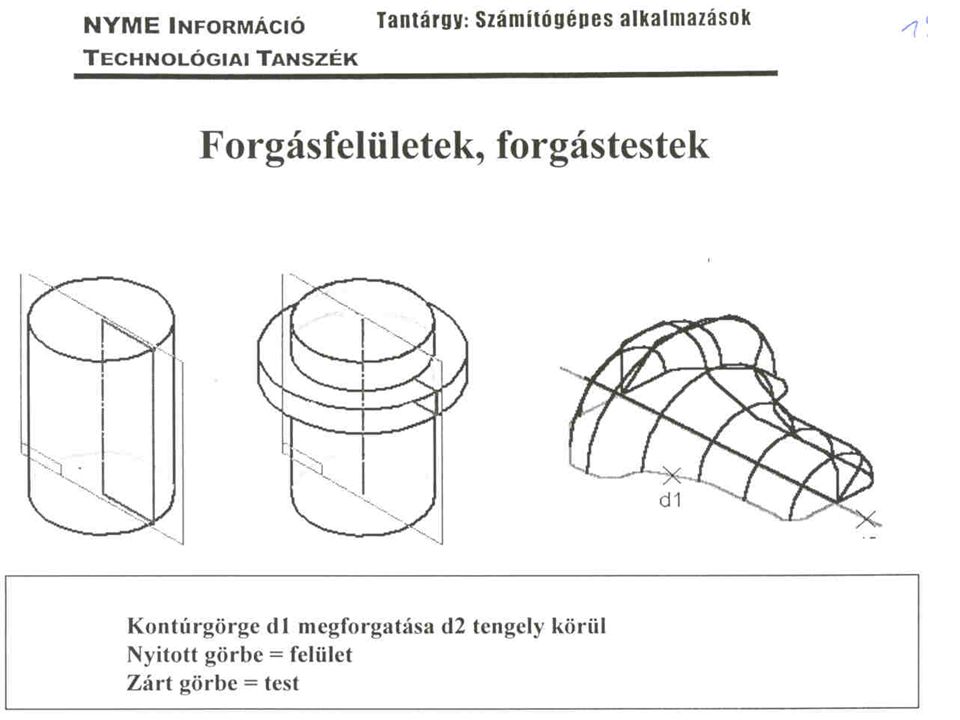
Pont : - a munkadarab modell legegyszerűbb eleme - a pont lehet térbeli vagy síkbeli : P=P(x,y,z) - térben , P=P(x,y,z0) - síkon Pontok : - bizonyos tervezési szempontból összetartozó pontok összerendelése (pl.: furatkör) Görbe : - osztályozhatók : 3Dgörbe - G=G(x,y,z) , 2Dgörbe - G=G(x,y,z0) - az egyenes és kör görbének kitüntetett szerepe van - az analitikus görbéken túl használunk pontokkal adott görbéket is (pl.: splines) Kontúr : - a görbékből van összerakva - tartalmazhat analitikus és pontsorozattal adott görbéket is - fontos az átmenetek kezdeti feltételeinek pontos meghatározása Felület : - csoportosítási lehetőség : "bonyolultságuk" szerint +egyszerű felületek - sík, henger, kúp, tórusz stb. +bonyolult felületek - generálható, szorzat-, spline-, szobor-, stb. (egyszerű felületek meghatározásának módjai a geometriából közismertek) Test : - a geometriai modellek legösszetettebb építőelemei - primitívek - tipikus elemkészlet lehet például: tégla, henger, kúp, gömb, ék
 - térben , P=P(x,y,z0) - síkon. Pontok : - bizonyos tervezési szempontból összetartozó pontok összerendelése (pl.: furatkör) Görbe : - osztályozhatók : 3Dgörbe - G=G(x,y,z) , 2Dgörbe - G=G(x,y,z0) - az egyenes és kör görbének kitüntetett szerepe van. - az analitikus görbéken túl használunk pontokkal adott görbéket is (pl.: splines) Kontúr : - a görbékből van összerakva. - tartalmazhat analitikus és pontsorozattal adott görbéket is. - fontos az átmenetek kezdeti feltételeinek pontos meghatározása. Felület : - csoportosítási lehetőség : bonyolultságuk szerint. +egyszerű felületek - sík, henger, kúp, tórusz stb. +bonyolult felületek - generálható, szorzat-, spline-, szobor-, stb. (egyszerű felületek meghatározásának módjai a geometriából közismertek) Test : - a geometriai modellek legösszetettebb építőelemei - primitívek. - tipikus elemkészlet lehet például: tégla, henger, kúp, gömb, ék.")
11
Modellezés input adatai
NYME Informatika Intézet Tárgy : Számítógépes alkalmazások Modellezés input adatai kézi vázlat műhelyrajz adatfile fizikai modellről felvett ponthalmaz

12
Testmodellezési megszorítások
NYME Informatika Intézet Tárgy : Számítógépes alkalmazások Testmodellezési megszorítások A testmodellezés a modellezett objektumra az alábbi feltételezéseket, illetve megszorításokat alkalmazza: az objektum merev test, konkrét és invariáns alakkal rendelkezik az általa lefoglalt teret homogénen tölti ki kiterjedése véges, a modellje leképezhető véges számú elemi test kompozíciójaként létrehozható a merevtestszerű mozgások és a halmaz-műveletek szempontjából zárt halmazként modellezhető

13
Felületek létrehozása
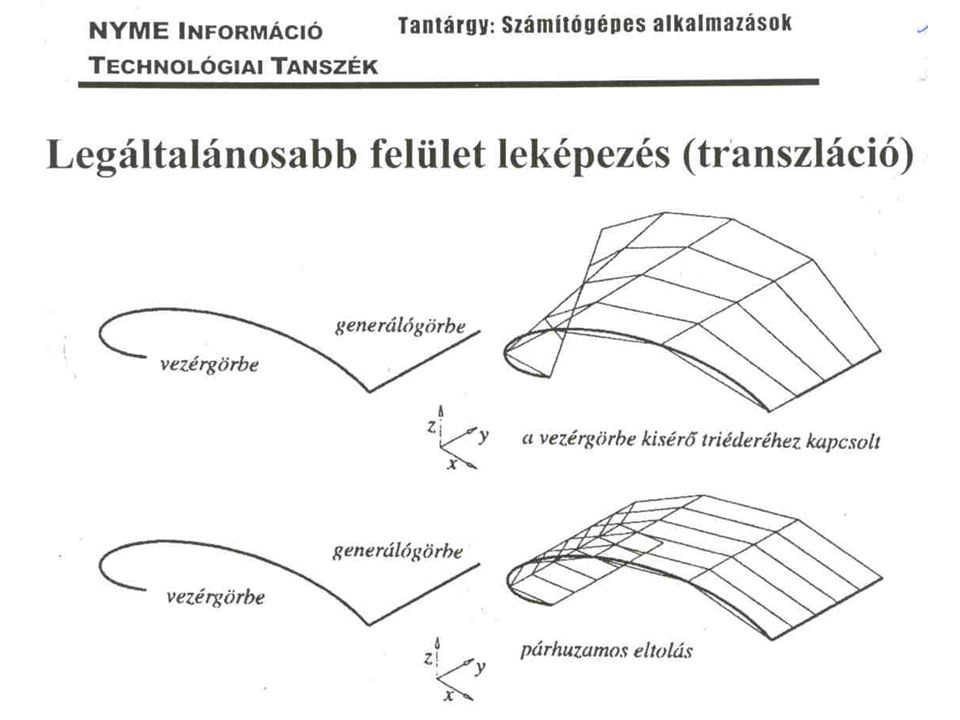
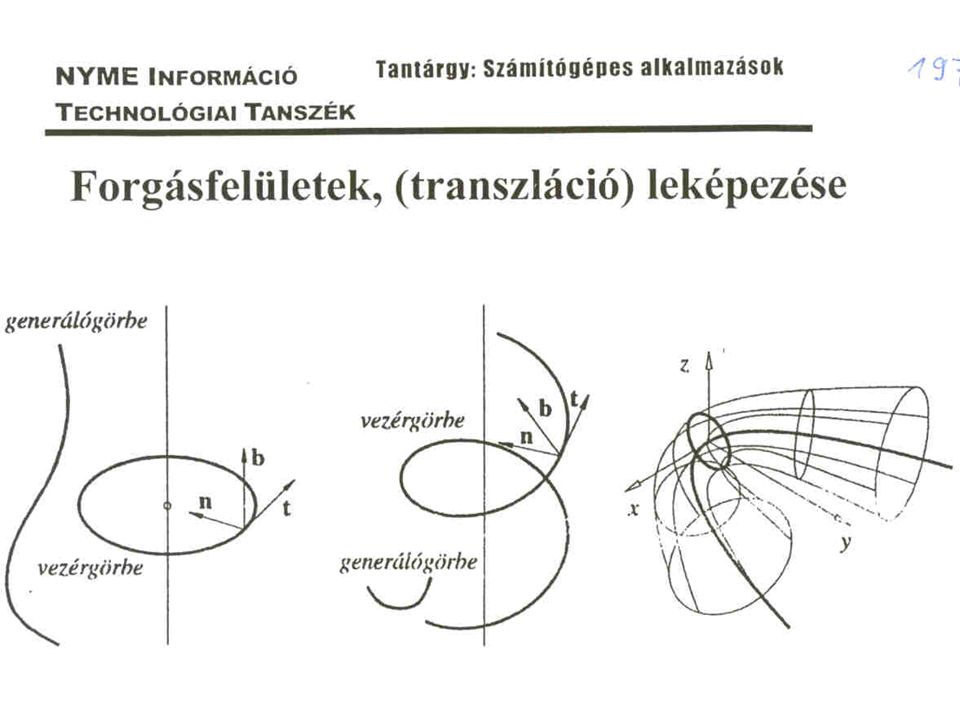
a bonyolult felületek egy jelentős csoportja a közelmúlt geometriai modellezésének középpontjában állt Oka: az ilyen felületek gyártásának feltételeiben bevált változás: többtengelyes szerszámgépek és vezérlések létrejötte volt egy sík- vagy térgörbét (leírógörbe) egy másik, sík- vagy térgörbe (vezérgörbe) által meghatározott pályán előírt módon (generálási mód - transzláció) mozgatunk (pl.: eltolás, forgatás,...) bonyolult felület keletkezik (transzlációs felület) alakja alapvetően a fenti három összetevőből -a generáló görbék közvetlenül szolgáltatják a lehetséges szerszámpályákat -a generálási mód pedig egyértelmű utalást adhat a felület gépi megmunkálással történő előállításakor alkalmazható gyártástechnológiai eljárásokra, módokra, eszközökre.
 egy másik, sík- vagy térgörbe (vezérgörbe) által meghatározott pályán. előírt módon (generálási mód - transzláció) mozgatunk (pl.: eltolás, forgatás,...) bonyolult felület keletkezik (transzlációs felület) alakja alapvetően a fenti három összetevőből. -a generáló görbék közvetlenül szolgáltatják a lehetséges szerszámpályákat. -a generálási mód pedig egyértelmű utalást adhat a felület gépi megmunkálással történő előállításakor alkalmazható gyártástechnológiai eljárásokra, módokra, eszközökre.")
15
NYME Informatika Intézet
Tárgy : Számítógépes alkalmazások Vonalfelületek Definíció : azon bonyolult felületek, melyek egyenes leírógörbével generálhatók Leírógörbe (generátor): egyenes Vezérgörbe (direktrix): általános sík vagy térgörbe A generálási módtól (transzláció) függően alapvetően három típusa: hengeres vonalfelület kúpos vonalfelület általános vonalfelület
: egyenes. Vezérgörbe (direktrix): általános sík vagy térgörbe. A generálási módtól (transzláció) függően alapvetően három típusa: hengeres vonalfelület. kúpos vonalfelület. általános vonalfelület.")
18
A "Reverse engineering" (mérnöki rekonstrukció) folyamata
NYME Informatika Intézet Tárgy : Számítógépes alkalmazások A "Reverse engineering" (mérnöki rekonstrukció) folyamata fizikai modell digitalizálása mérési pontok editálása mérési pontok beolvasása CAD rendszerbe pontokra felületi görbék illesztése görbékre felület vagy felületek illesztése modell pótlása, kiigazítása
 folyamata fizikai modell digitalizálása. mérési pontok editálása. mérési pontok beolvasása CAD rendszerbe. pontokra felületi görbék illesztése. görbékre felület vagy felületek illesztése. modell pótlása, kiigazítása.")
19
"Reverse engineering" alkalmazása
NYME Informatika Intézet Tárgy : Számítógépes alkalmazások "Reverse engineering" alkalmazása alkatrészről dokumentáció készítése alkatrész ellenőrzése, megjelenítése többet megtudni a versenytárs konstrukciójáról régészeti leletekből modell építése sebészeti segédeszközök előállítása "földidegen" alkatrészek űrkutatás számára protézisek, művégtagok gyártása multimédia és animáció

20
"Reverse engineering" folyamatábra
NYME Informatika Intézet Tárgy : Számítógépes alkalmazások "Reverse engineering" folyamatábra

21
Letapogatási stratégiák
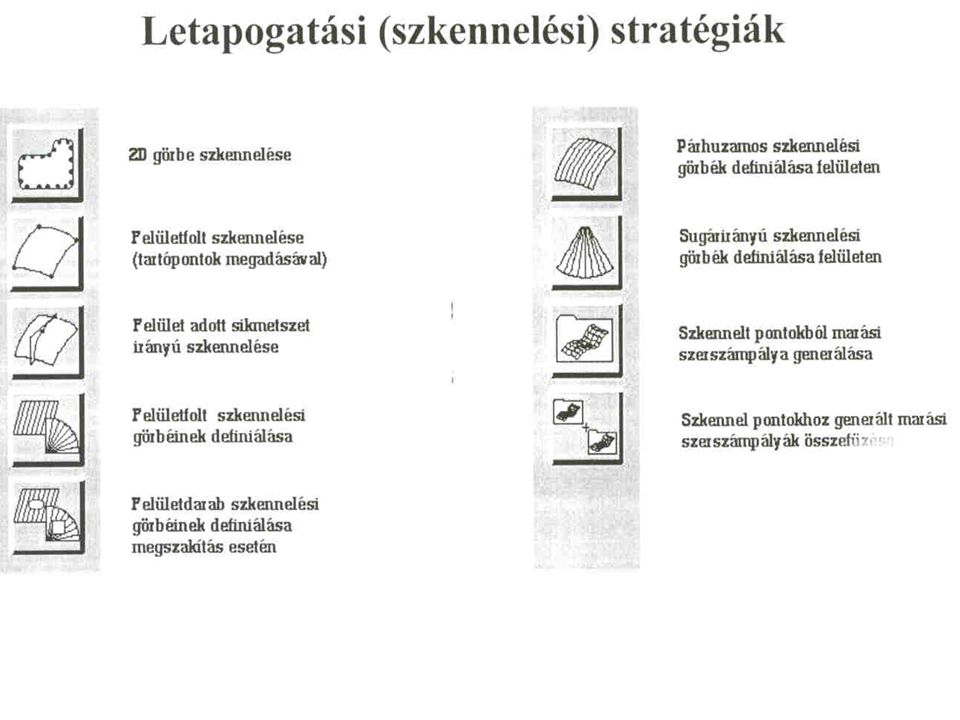
NYME Informatika Intézet Tárgy : Számítógépes alkalmazások Letapogatási stratégiák Manuális letapogatás Ebben az esetben a felhasználó mozgatja a mérőfejet az általa legjobbnak tartott pálya mentén. Az előre meghatározott stratégia hiánya nem segít a pontokra történő görbék vagy felületek illesztésnél Lineáris letapogatás A modellek egyenes mentén kerülnek letapogatásra. A digitalizálás iránya a majdani vagy feltételezett megmunkálás irányával lehet párhuzamos, illetve azzal szöget bezáró. Egy vagy kétirányú letapogatás is lehetséges. Egyirányú letapogatás esetén a tapintó kiemelés után gyorsmenetben tér vissza kiinduló pozíciójába. Radiális letapogatás Azok a felületek digitalizálhatók ezzel a módszerrel, amelyek egy adott forgástengelyhez viszonyítva megközelítőleg szimmetrikusak. Útmenti letapogatás Egy jól definiált poligon görbe mindenkori pontjára merőlegesen történik a digitalizálás. A merőleges irányú elmozdulás mértéke tetszőleges lehet. Kontúrmenti letapogatás Egy adott kontúr irányában ekvidisztans görbék mentén történik meg a felületi pontok meghatározása.

23
CAD modell javítását indikáló információk
NYME Informatika Intézet Tárgy : Számítógépes alkalmazások CAD modell javítását indikáló információk folytonossági hiányok szabályos szöget bezáró felületek párhuzamos felületek egyenesek és körök (analitikus görbék) ismétlődő elemek távolsága él letörések, lekerekítések
 ismétlődő elemek távolsága. él letörések, lekerekítések.")
24
CAE, a számítógépes analízis és szimuláció eszközei és módszerei
NYME Informatika Intézet Tárgy : Számítógépes alkalmazások CAE, a számítógépes analízis és szimuláció eszközei és módszerei hálógenerálás alkatrészek hő és feszültség analízise rugalmas, képlékeny alakváltozások műanyagok folyásanalízise kinematikai analízis eszközei és módszerei

25
Véges elemek hálója (FEM)
NYME Informatika Intézet Tárgy : Számítógépes alkalmazások Véges elemek hálója (FEM)
")
28
NYME Informatika Intézet
Tárgy : Számítógépes alkalmazások IPARI ROBOTOK Definíció: Ipari robotoknak azokat a szabadon programozható, többcélú mechanizmusokat nevezzük, amelyek anyag, alkatrész, szerszám vagy egyéb eszköz egyszerűen változtatható program szerinti mozgatását, térbeli helyzetének megváltoztatását vagy megtartását, megfogását vagy elengedését, vagyis manipulálását végzik.

29
A robotok alkotóegységei
NYME Informatika Intézet Tárgy : Számítógépes alkalmazások A robotok alkotóegységei Mechanika : A tárgy pozícionálását és mozgatását biztosítja Effektorok : A tárgy megfogását vagy megmunkálását végzi Motorok : A mozgás vagy az effektorok számára szükséges energiát biztosítja Szenzorok : Érzékeli vagy analizálja a mechanizmus aktuális állapotát illetve környezetét Vezérlés : A robotmechanizmus mozgását szinkronizálja Számítógép : A robotprogram szerkesztése és futtatása, a robot tesztelése

30
Az inverz transzformáció
NYME Informatika Intézet Tárgy : Számítógépes alkalmazások Az inverz transzformáció A robotprogramozás alapproblémája a következő : A tárgy egy pontja a szerszám koordinátarendszerében adott, és azt kell a világ koordinátarendszerbe transzformálni, vagyis az előzőekben felírt számítás inverze a feladat. Ennek az inverz transzformációnak azonban több megoldása is lehetséges (tehát szinguláris pontjai vannak a robot munkatérnek) Néhány konfigurációs definícióval egyértelművé tehető a megoldás (jobb illetve bal kezes konfiguráció, alsó vagy felső állás)
 Néhány konfigurációs definícióval egyértelművé tehető a megoldás (jobb illetve bal kezes konfiguráció, alsó vagy felső állás)")
31
A robot programozás három fajtája
NYME Informatika Intézet Tárgy : Számítógépes alkalmazások A robot programozás három fajtája betanítás és a feladat ismétlése kódrendszerben történő programozás magasszintű programnyelven történő programozás (az utasítások az emberi nyelv azonos értelmű szavainak felelnek meg)
")
32
Számítógéppel Segített Robot Programozás
NYME Informatika Intézet Tárgy : Számítógépes alkalmazások Számítógéppel Segített Robot Programozás Computer Aided Robot Programming (CARP) a robotpályák meghatározása (CAD/CAM software segítségével) posztprocesszálás (a robot program generálása) a program áttöltése futtatás
 a robotpályák meghatározása (CAD/CAM software segítségével) posztprocesszálás (a robot program generálása) a program áttöltése. futtatás.")
33
A robot betanítása A robotkar mozgatásával Szimulátor mozgatásával
NYME Informatika Intézet Tárgy : Számítógépes alkalmazások A robot betanítása A robotkar mozgatásával Szimulátor mozgatásával "Teach box" alkalmazásával