Előadást letölteni
3
Ez a dokumentum az Európai Unió pénzügyi támogatásával valósult meg. A dokumentum tartalmáért teljes mértékben Szegedi Tudományegyetem vállalja a felelősséget, és az semmilyen körülmények között nem tekinthető az Európai Unió és / vagy az Irányító Hatóság állásfoglalását tükröző tartalomnak. PARTNEREK:

4
Valós idejű mérések és szabályozások Kommunikáció és léptetőmotor vezérlés

5
Inter-Process communication

6
Folyamatok közötti kommunikáció

7
Inter-Process kommunikációs módszerek ModelLeírás Nem determinisztikus szálak között Determinisztikus ↔ Nem determinisztikus Aktuális értékAktuális állapot megosztása Single-Process shared variables with RT FIFO FrissítésekCsak változás esetén, utolsó érték NotiffierRT FIFO StreemelésNagy adatmennyiség átvitele, minden adat RT FIFO Üzenetek és parancsok Kevés adat, de nem veszhetnek el rövid látencia QueueRT FIFO

8
Hálózati kommunikációs módszerek Hálózati konfiguráció Üzenetek vagy parancsok StreamFrissítésekAktuális érték cRIO – LV HostNetwork Stream* Network Stream Shared Variable a) Shared Variable b) Front panel cRIO – 3rd partyTCP/IP UDP / TCP/IP cRIO – Web kliens Web szerviz
 Shared Variable b) Front panel cRIO – 3rd partyTCP/IP UDP / TCP/IP cRIO – Web kliens Web szerviz")
9
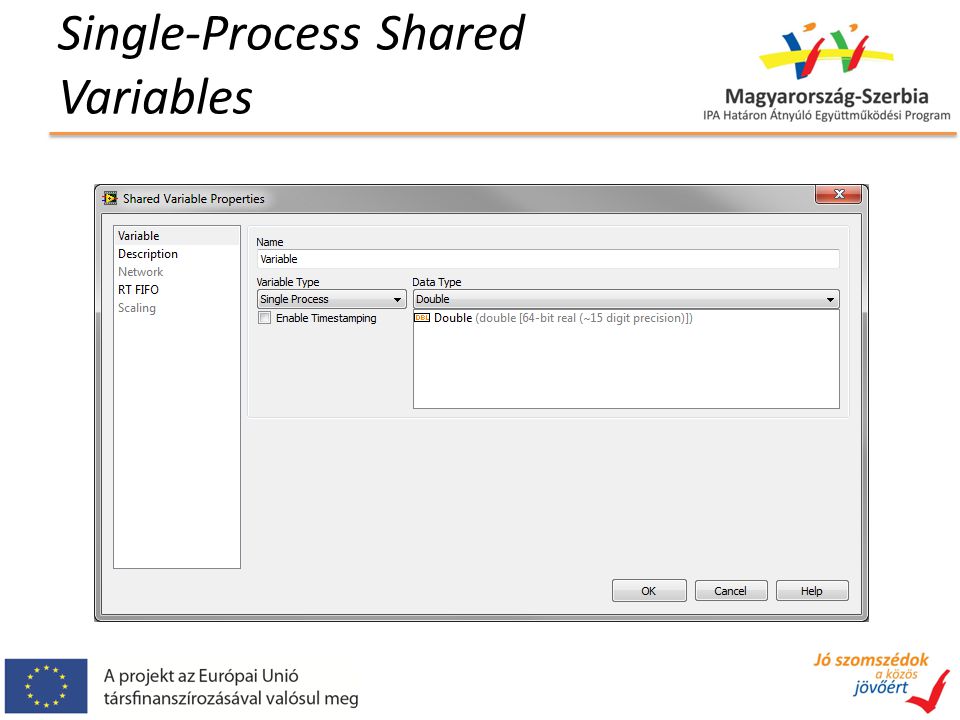
Single-Process Shared Variables

11
Shared Variables – használat irányelvei Első használatkor inicializálódnak: Célszerű a program elején értelmes értékekkel inicializálni Single element FIFO: csak az utolsó értéket tartja meg FIFO: a hibakimenet jelzi a FIFO állapotát (overflow, underflow)
")
12
Queue

13
RT FIO

14
Shared Variable with multiple element RT FIFO

15
Network-Published Shared Variables

16
Opciók RT FIFO: determinisztikus folyamatokban használható Network Buffer: nem csak utolsó adat tárolása Deploy: a változó gazdája (automatikus) PC vagy cRIO Undeploy: változó eltávolítása (manuális)
 PC vagy cRIO Undeploy: változó eltávolítása (manuális)")
17
Network-Shared Shared Variable with RT FIFO

18
Network Streams - Használat

19
Netwok Streams – példa http://www.ni.com/white-paper/12267/en/

20
Feladatok

21
1. Kapcsolás elkészítése Készítse el a léptetőmotor meghajtására alkalmas kapcsolást! – Léptetőmotor típusa: bipoláris, max 200 mA beépített áramkorlátozó ellenállásokkal (100 Ω) – I298 Dual H-híd (8-35 V, max 1,5 A) – Tápegység: 12 V
 – I298 Dual H-híd (8-35 V, max 1,5 A) – Tápegység: 12 V.")
22
2. Léptetőmotor vezérlése Valósítsa meg a léptetőmotor vezérléséhez szükséges programot! Figyeljen arra, hogy a nagy prioritású feladatok semmiképp se használhassanak túl sok processzoridőt!

23
3. Host program elkészítése Készítse el a számítógépen futó programot, mely vezérli a léptetőmotor fordulatszámát!

24
Felkészülés Szabályozások, szabályozási módszerek.





 • Ikonos kezelővel megegyező kezelő felület • 1 mester, 32 felhasználói,>")






 tulajdonképpen egy napló, azaz időben rendezett, felhasználó által begépelt szöveg sorozat.>")










