Előadást letölteni
2
Geodézia Kft. Mobil térképező rendszer

3
Modularitás és skálázhatóság a digitális fotogrammetriát és a 3D lézerszkennert ötvöző megoldás mobil lézerszkenner & fotogrammetriai rendszer Nagy teljesítményű 3D lézerszkenner 5-6 CCD kamerából álló kamerarendszer Inerciális rendszer (IMU) GNSS rendszer (NOVATEL) Irányító és feldolgozó munkaállomás, mely a Geosoft saját, illetve ESRI alapú fejlesztéseiből állnak Szállító gépjármű (választás kérdése, a legegyszerűbb középkategóriás gépjármű is megfelel)
 GNSS rendszer (NOVATEL) Irányító és feldolgozó munkaállomás, mely a Geosoft saját, illetve ESRI alapú fejlesztéseiből állnak Szállító gépjármű (választás kérdése, a legegyszerűbb középkategóriás gépjármű is megfelel)")
4
A szkenner A szkenner függetleníthető a rendszertől – önállóan földi felmérési állomásként is használható (gazdasági előny) Sebesség: 1016727pont/sec (1millió pont) Pontosság (távmérés): <1mm 25m-ig; <3mm 50m-ig; <10mm 100m-ig Hatótávolság: max. 187m Felbontás (statikus mód): max.0.6x0.6mm 10m-en; 1.6x1.6mm 25m-en
: max.0.6x0.6mm 10m-en; 1.6x1.6mm 25m-en.")
5
Statikus lézerszkennelésMobil lézerszkennelés Minden pont ugyanabban a koordinátarendszerben van Minden pont másik koordinátarendszerben van Probléma: hogyan tudjuk betranszformálni ezeket a lokális koordinátarendszereket egy globális koordinátarendszerbe?

6
titi tjtj tntn t0t0 time A felvétel pozícionként változó

7
titi tjtj tntn t0t0 time A felvétel pozícionként változó

8
titi tjtj tntn t0t0 time A felvétel pozícionként változó

9
titi tjtj tntn t0t0 time A felvétel pozícionként változik

10
Szenzorok

11
TrajectoryAdott időpillanatban készült pontsorok Idő alapján szinkronizál + Ráforgatja a koordinátarendszerre Y The point cloud is a spiral X

12
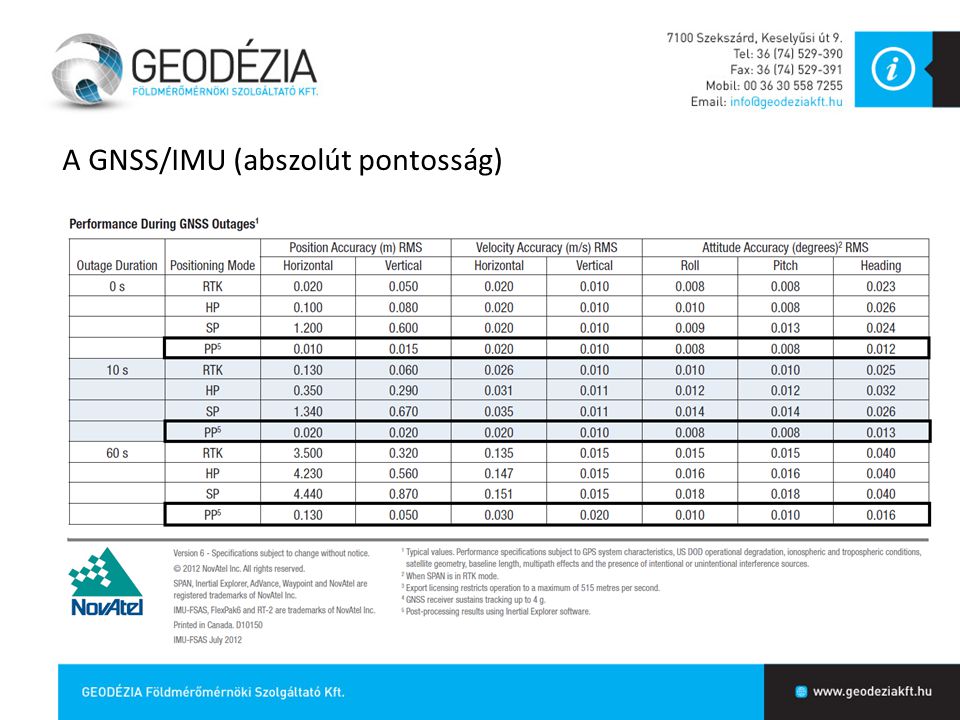
NovAtel SPAN-SE L1&L2 GPS+GLONASS Dedicated CPU for high speeds and low latency for high dynamics applications Accuracy Hz, rms: 1 cm + 1 ppm Speed of GNSS-position determination: 20 Hz 200×248×76 mm, 3.4 kg Consumption: 10 W (typical) Interface for IMU and odometer NovAtel IMU-FSAS Speed of INS determination of the location, velocity and orientation: 200 Hz 128×128×104 mm, 2.1 kg Consumption: 10 W (max.) MTBF: 35,000 hr NovAtel UIMU The economical solution A GNSS/IMU (abszolút pontosság)
 Interface for IMU and odometer NovAtel IMU-FSAS Speed of INS determination of the location, velocity and orientation: 200 Hz 128×128×104 mm, 2.1 kg Consumption: 10 W (max.) MTBF: 35,000 hr NovAtel UIMU The economical solution A GNSS/IMU (abszolút pontosság)")
14
A kategória: nagy pontosságú mérőeszköz Mérnöktopográfia Minőség-ellenőrzés (épített-objektum) Részletgazdag híd és alagút profilok Deformáció mérés B kategória: Közepes pontosságú mérőeszköz Tervezés Infrastruktúra részletes leírása Környezeti mérés Földmunkák mérése Városi terület térképezése Erózió elemzés C kategória: Kis pontosságú mérőeszköz Előzetes városi térképezés Szállítási útvonalak statisztikái Általános infrastruktúrális leírás Alkalmazások A mobilszkennelés három fő alkalmazás-besorolási kategóriája
 Részletgazdag híd és alagút profilok Deformáció mérés B kategória: Közepes pontosságú mérőeszköz Tervezés Infrastruktúra részletes leírása Környezeti mérés Földmunkák mérése Városi terület térképezése Erózió elemzés C kategória: Kis pontosságú mérőeszköz Előzetes városi térképezés Szállítási útvonalak statisztikái Általános infrastruktúrális leírás Alkalmazások A mobilszkennelés három fő alkalmazás-besorolási kategóriája")
15
A kamerarendszer A kameraképek maguk is felhasználásra kerülnek a térmodell létrehozásában Lézerszkennertől függetlenül is előáll egy mérési állomány, egy fotogrammetriai termék 5-6 CCD kamera 1024x768 felbontású színes kép 180°-os panoráma frontkép(5kamera), 6. kamera az útburkolatra irányítható Képkészítés előre definiált távolság alapján

16
A GNSS/IMU (abszolút pontosság) Leica HDS 7000 50hz rotation speed 1M points/sec. Class 1 safety Range accuracy at 50 m : 0.8 mm/1.2 mm/2.7 mm (white/gray/black) Range max : 187 m Can be dismounted for normal tripod based projects better ROI During post-processing, special filters can be applied for optimize the laser scanner point clouds database, including : Cleaning of too close points Cleaning of too close profiles Cleaning based on range Cleaning based of noise
 Range max : 187 m Can be dismounted for normal tripod based projects better ROI During post-processing, special filters can be applied for optimize the laser scanner point clouds database, including : Cleaning of too close points Cleaning of too close profiles Cleaning based on range Cleaning based of noise.")
17
Adatformátumok Standard adatformátumok 3D pontfelhő az ASTM E57 szabvány szerint Képek jpg. formátumban Szkennelt állomány LAS, TXT, PTS formátumban ESRI SHAPE CAD formátumok (DWG, ASCII stb.)
.")
18
A kalibrálást a felhasználó végzi, de elvégezhető a gyártó által is Szoftveres háttér – a mérés és feldolgozás folyamata Rendszerkalibráció A kalibrálás egyszerű, külön szoftvermodul segíti Az eszköz tetszés szerint áthelyezhető másik járműre

19
A mérés A méréshez egy ember is elegendő Számos minőségi paraméter ad visszajelzést és beavatkozási lehetőséget az operátornak GNSS koordinátákkal megjelölt események manuális rögzítése Az előre definiálttól eltérő képrögzítés Menet közben dönthetünk az esetleges pozíció hibák javításáról (lassítás, gyorsítás, újrabejárás, azaz jó pozíciók felvétele és azzal való javítás Útvonaltervezés!

20
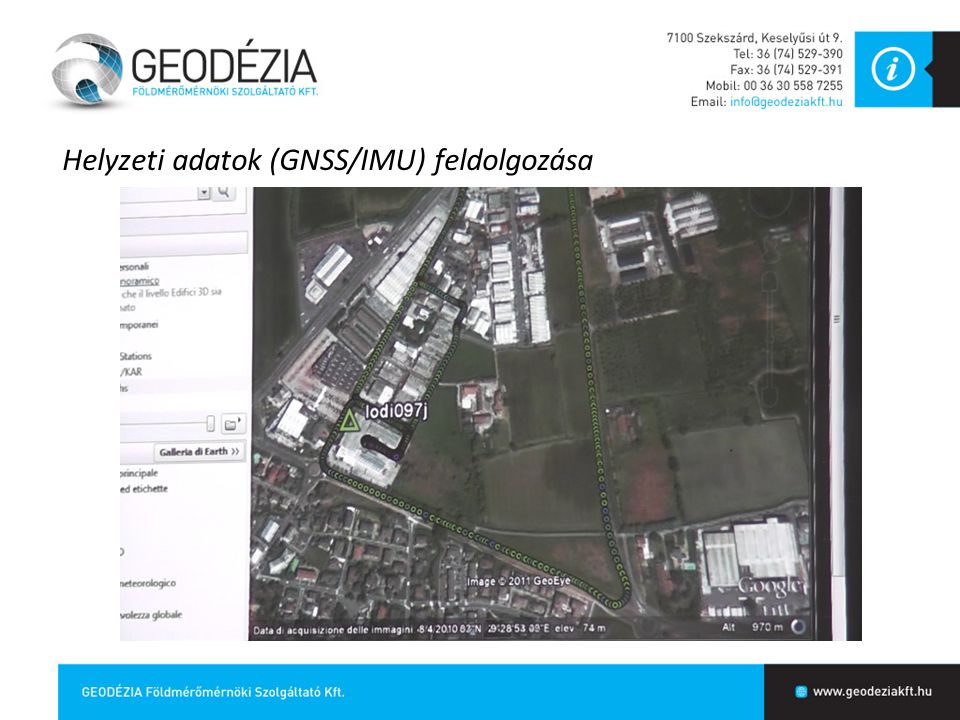
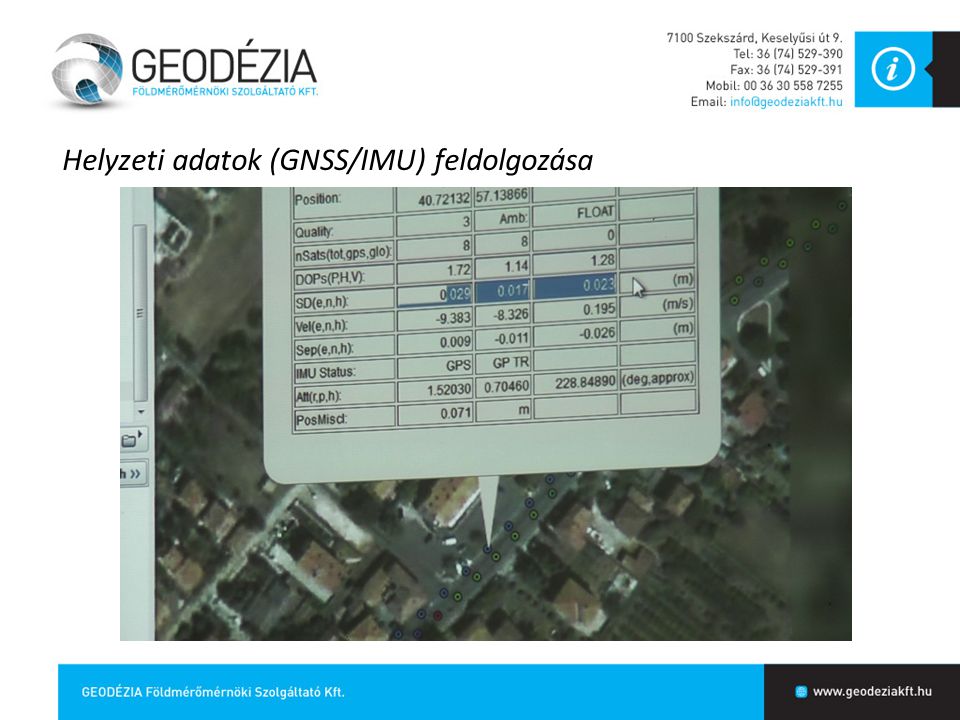
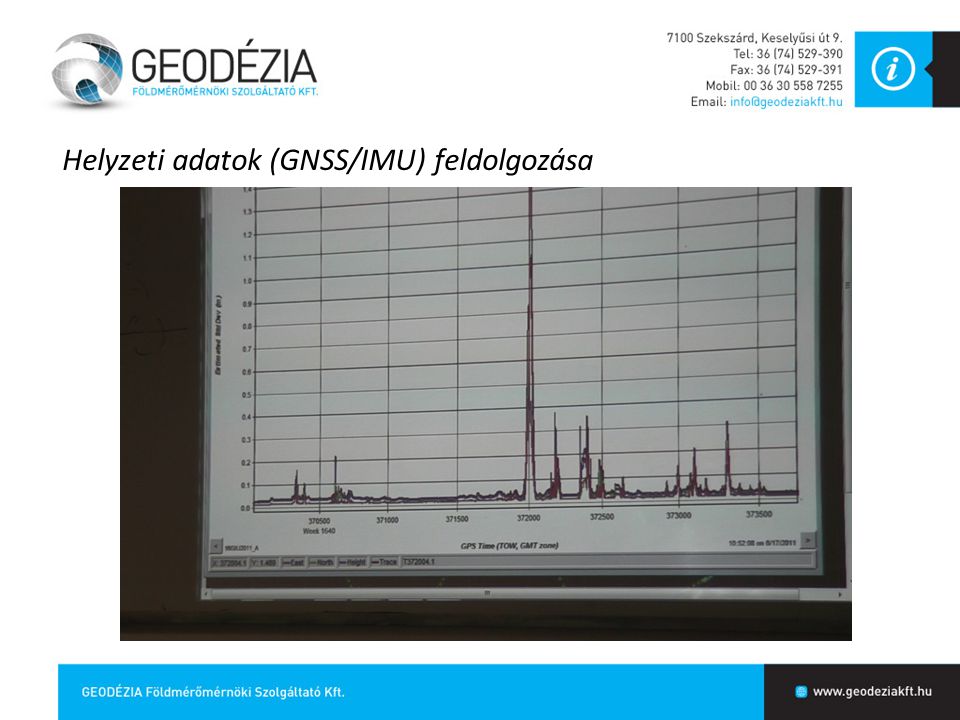
Helyzeti adatok (GNSS/IMU) feldolgozása
 feldolgozása")
25
A mérési állomány feldolgozása 3D lézerszkennelés és sztereoszkópikus képkiértékelés A képek maguk is felhasználásra kerülnek a 3D képalkotásban Dinamikus, esemény- érzékeny 3D pontfelhő betöltés

26
A mérési állomány feldolgozása Nem csak geometriai 3D (ami a képernyőn valójában csak 2D) Sztereoszkópikus látvány olcsó hardver kiegészítőkkel Valódi 3D környezet – nagyságrendekkel rövidebb szerkesztési idő Anaglif output lehetőség, hogy az ügyfél is láthassa 3D-ben akár papír alapon is az eredményt
 Sztereoszkópikus látvány olcsó hardver kiegészítőkkel Valódi 3D környezet – nagyságrendekkel rövidebb szerkesztési idő Anaglif output lehetőség, hogy az ügyfél is láthassa 3D-ben akár papír alapon is az eredményt")
27
A szerkesztést és feldolgozást tovább segítik a rendszer olyan jellemzői, mint pl. a szkenner elhelyezése, vagy két szkenner alkalmazása. 40 ° függőleges iránytól 14 ° a jármű tengelyétől A mérési állomány feldolgozása

28
Modularitás (lehetőség az igények és árak optimalizálására) Rendszerelemek a kategóriájuk legjobbjaitól kiválasztva, hogy a legnagyobb minőség biztosítva legyen Megbízható relatív pontosság Digitális térfotogrammetria alkalmazása: a költséges kamerarendszer nem csak “látvány”, hanem önmagában is mérnöki modell, értéket jelentő termék előállítására alkalmas 3D valódi környezetben való feldolgozás, hogy a 3D környezet előnyeit ne csak a mérés, hanem a feldolgozás során is kihasználhassuk. Összefoglaló

29
„A mobil térképező rendszer a földmérők eszköze!” Köszönjük a figyelmet!