Előadást letölteni
1
3.2. Axonometria – Műszaki rajzok párhuzamos vetítéssel

2
Párhuzamos vetítések, axonometriák
Kevésbé valószerű – de közeli, kis tárgyaknál . . . Affin transzformáció A képsíkra merőlegesen, vagy ferde szög alatt 4 „független” pont és képe meghatározza

3
Emlékeztető Műszaki rajzoknál - egyezményes ábrázolási módok: - könnyen szerkeszthető - a szakemberek által megszokott, - könnyen értelmezik - méretek és arányok jól „leolvashatók” A műszaki rajzolónak szerkesztési eljárások - a számítógéphez számítási eljárások

4
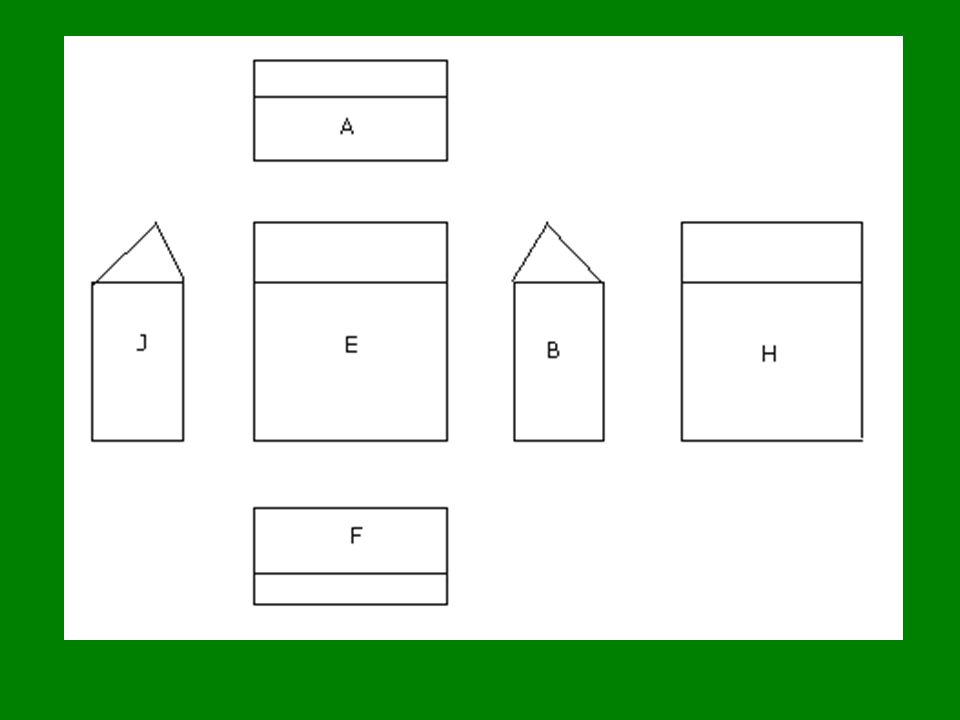
Merőleges vetítés koordináta-síkokra
F H E J B „Számítások”: a harmadik koordináta elhagyása

6
Kiegészítő nézet ferde síkra
A test jellemző síkjával párhuzamos síkra Forgatással és nyírással visszavezethető a merőleges vetítésre A nézetek szabványos egyesítése

7
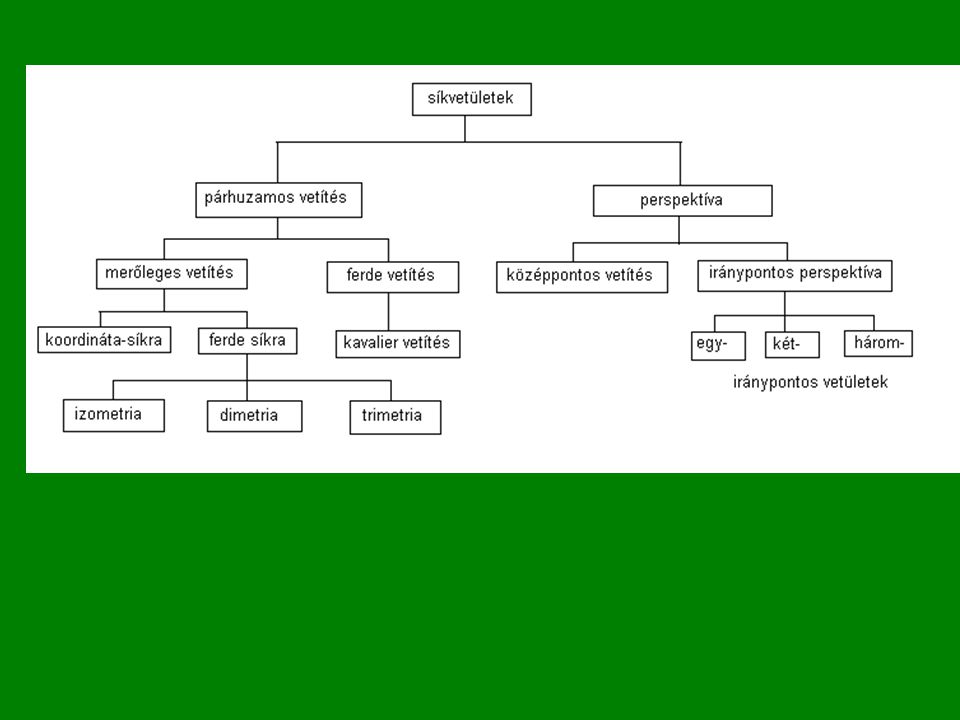
Axonometriák Frontális axonometria Izometria Dimetria Trimetria (olv)
Affin mátrix, független ponttal

8
Affin transzformációk mátrixának előállítása
A tér egy affin transzformációját 4 „független” pont és képe A „határozatlan együtthatók” módszere Pl. (gyakran): a TKR „ölében ülő” téglatest O = (0,0,0) A = (a,0,0), B = (0,b,0), C = (0,0,c)
: a TKR „ölében ülő téglatest O = (0,0,0) A = (a,0,0), B = (0,b,0), C = (0,0,c)")
9
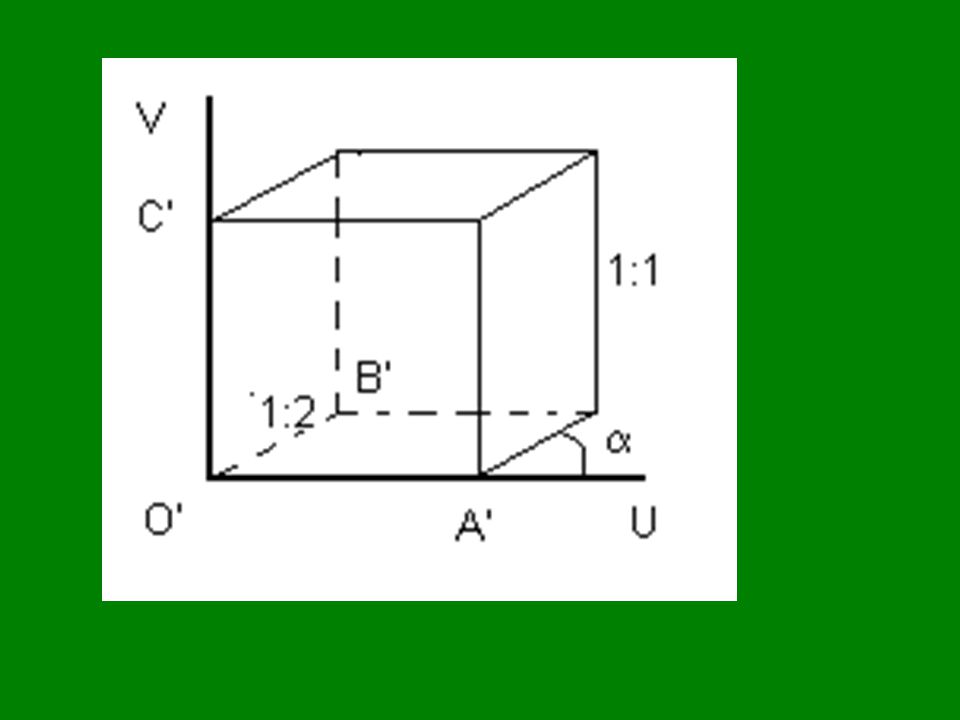
Kavalier perspektíva, frontális axonometria
Előírások: - vetítés: párhuzamos, ferde szögben - az UV képsík | | a TKR XY „homloksíkjával” - X’ = U, Z’ = V; : 1 - Y’: 45 fokban hátrafelé; 1 : 2 P’ = M · P; M = ( 1 t 0 0); |0 t 1 0| | | ( ) t = 2/4
; |0 t 1 0| | | ( ) t = 2/4.")
10
A határozatlan együtthatók módszerével:
O = [0, 0, 0, 1]; O’ = [0, 0, 0, 1]; a képsíkban X tengely (TKR) képe || U tengely (KKR): A = [1, 0, 0, 1]; A’ = [1, 0, 0, 1] Z tengely (TKR) képe || V tengely (KKR) C = [0, 0, 1, 1], C’ = [0, 1, 0, 1] Y tengely képe 450 -ban hátrafelé: B = [0, 1, 0, 1]; B’ = [bu, bv, bw, 1]; bu = cos(f) / 2, bv = sin(f) / 2, bw = +1 (vagy más !!!)
 képe || U tengely (KKR): A = [1, 0, 0, 1]; A’ = [1, 0, 0, 1] Z tengely (TKR) képe || V tengely (KKR) C = [0, 0, 1, 1], C’ = [0, 1, 0, 1] Y tengely képe 450 -ban hátrafelé: B = [0, 1, 0, 1]; B’ = [bu, bv, bw, 1]; bu = cos(f) / 2, bv = sin(f) / 2, bw = +1 (vagy más !!!)")
11
mik kiszámítása: mik = ? : M (A B C O ) := (A’ B’ C’ O’) = (m11 m12 m13 m14) ( ) := ( 1 bu ), (m21 m22 m23 m24) | | | 0 bv | (m31 m32 m33 m34) | | | | ( ) ( ) ( )
 := (A’ B’ C’ O’) = (m11 m12 m13 m14) ( ) := ( 1 bu 0 0 ), (m21 m22 m23 m24) | | | 0 bv 1 0 | (m31 m32 m33 m34) | | | | ( ) ( ) ( )")
12
mik kiszámítása: mik = ? : M (A B C O ) := (A’ B’ C’ O’) ( m11+m14 m12+m14 m13+m14 m14 ) := ( 1 bu ), | m21+m24 m22+m24 m23+m24 m24 | | 0 bv | ( m31+m34 m32+m34 m33+m34 m34 ) | | ( ) ( ) M = ( 1 bu ), bu = cos (f) / 2, | 0 bv | bv = sin (f) / 2, | | ( ) f = 450, esetleg 300.
 := (A’ B’ C’ O’) ( m11+m14 m12+m14 m13+m14 m14 ) := ( 1 bu 0 0 ), | m21+m24 m22+m24 m23+m24 m24 | | 0 bv 1 0 | ( m31+m34 m32+m34 m33+m34 m34 ) | | ( ) ( ) M = ( 1 bu 0 0 ), bu = cos (f) / 2, | 0 bv 1 0 | bv = sin (f) / 2, | | ( ) f = 450, esetleg 300.")
14
Axonometria – tengelyméretes ábrázolás
Párhuzamos, merőleges vetítés egy ferde állású képsíkra „tengelyméretes ábrázolás”: előírás a tengelyirányú rövidülésekre (Egy d szakasz rövidülése: k = d’ / d = cos a ) A három tengelyirányú rövidülésre: k2 + l2 + m2 = 2 Megőrzi a párhuzamosságot és egy-egy irányban a szakaszok arányát Affin transzformációval számolható
 A három tengelyirányú rövidülésre: k2 + l2 + m2 = 2. Megőrzi a párhuzamosságot és egy-egy irányban a szakaszok arányát. Affin transzformációval számolható.")
15
Axonometria - a rajz szokásos elrendezése:
Y’ X’ Z’ U V

16
Izometria, egyméretű axonometria
k = l = m = 2/3 = 0.82…; ( ~1 !) A tengelyirányú távolságok jól érzékelhetőek A TKR egységkockáját a csúcsára állítva a képsíkra merőlegesen A tengelyek vetülete egymástól 1200-ra
 A tengelyirányú távolságok jól érzékelhetőek. A TKR egységkockáját a csúcsára állítva a képsíkra merőlegesen. A tengelyek vetülete egymástól 1200-ra.")
17
Izometria, egyméretű axonometria
M = ( m11 m12 m13 m14 )= | m21 m22 m23 m24 | | m31 m32 m33 m34 ) ( ) =( -t t ) | -f/2 -f/2 f 0 | ( -h –h -h h ) ( ) h = 3/3, f = 2/3, és t = 1/2
= | m21 m22 m23 m24 | | m31 m32 m33 m34 ) ( ) =( -t t 0 0 ) | -f/2 -f/2 f 0 | ( -h –h -h h ) ( ) h = 3/3, f = 2/3, és t = 1/2.")
18
Levezetés: 4 független pont és képe:
{O A B C} {O’ A’ B’ C’} –f f –g –g h m a = OA = 1, AB = 2 f = AB/2 = 2/2, g = AB (3/2)/3, h = 2g; m = akármi, de 0
/3, h = 2g; m = akármi, de 0.")
21
Dimetria k = l/2 = 0.47…, l = m = ; Rajzolási szabály (jó közelítés): X” balra lefelé 7/8 irányban Y” jobbra lefelé 1/8 irányban Z” fölfelé az X méretek: 1:2 az Y és Z méretek: 1:1 P’ = M · P; M = ( -2/4 21/ ) |-14/12 –2/12 8/3 0 | ( -7/3 –1/3 –1/3 1/3) ( )
: X balra lefelé 7/8 irányban Y jobbra lefelé 1/8 irányban Z fölfelé az X méretek: 1:2 az Y és Z méretek: 1:1. P’ = M · P; M = ( -2/4 21/8 0 0 ) |-14/12 –2/12 8/3 0 | ( -7/3 –1/3 –1/3 1/3) ( )")
22
Trimetria (olv.) k, l, m: három különböző, rögzíthető érték
P’ = M · P ; 3D 3D mozgás: - O’ a T (a KKR origója) fölött, - Z” = V tengely - X’, Y’, Z’ a képsíkot P, Q, R-ben döfi cos a = k, cos b = l, cos g = m szög alatt. M a határozatlan együtthatók módszerével
 fölött, - Z = V tengely - X’, Y’, Z’ a képsíkot P, Q, R-ben döfi cos a = k, cos b = l, cos g = m szög alatt. M a határozatlan együtthatók módszerével.")