Előadást letölteni
1
Szabályozási Rendszerek 2014/2015, őszi szemeszter Előadás Automatizálási tanszék

2
Mintavételes szabályozások Zárt mintavételes szabályozási kör alapvető elvi felépítése

3
Mintavételes szabályozások Zárt mintavételes szabályozási kör alapvető részletes felépítése x(t): FI, folytonos jel x[k] = x(kT s ): DI, diszkrét jel T s : mintavételezési idő (sampling time) k = 0, 1, 2… : mintavételezés sorszáma
![Mintavételes szabályozások Zárt mintavételes szabályozási kör alapvető részletes felépítése x(t): FI, folytonos jel x[k] = x(kT s ): DI, diszkrét jel T s : mintavételezési idő (sampling time) k = 0, 1, 2… : mintavételezés sorszáma](http://images.slideplayer.hu/10/2843652/slides/slide_3.jpg "Mintavételes szabályozások Zárt mintavételes szabályozási kör alapvető részletes felépítése x(t): FI, folytonos jel x[k] = x(kT s ): DI, diszkrét jel T s : mintavételezési idő (sampling time) k = 0, 1, 2… : mintavételezés sorszáma")
4
Mintavételes szabályozások A digitális szabályozó funkciói -A mintavételezett és digitalizált FI kimenőjel fogadása és továbbítása a szabályozót megvalósító algoritmus felé. -A szabályozási algoritmus által minden mintavételt követően kiszámított Dl, digitális bemenőjel továbbítása a D/A átalakító felé. -A szabályozás alapjelének fogadása közvetlenül egy ember- gép kapcsolati felületről (Man- Machine interface - MMI) vagy egy kommunikációs hálózaton keresztül.
 vagy egy kommunikációs hálózaton keresztül..")
5
Mintavételes szabályozások A mintavételes rendszerek előnyei -A digitális technológia megbízhatóbb és olcsóbb. -A megvalósítható algoritmusok körét tekintve a digitális technológia rugalmasabb. -A módosítások és bővítések egyszerűen kivitelezhetőek, adminisztrálhatok, a pontosság hosszú időn keresztül garantált. -Az alapjel megadására, a szabályozó paraméterek megváltoztatására, valamint a működés monitorozására egyaránt egyszerű és hatékony módszerek állnak rendelkezésre.

6
Mintavételes szabályozások Szempontok a mintavételes rendszer tervezéséhez -Két mintavétel között a zárt rendszer lényegében nyitott rendszerként működik, így ezen periódusban a visszacsatolás előnyös tulajdonságai nem jutnak érvényre. -A mintavételezési időt gondosan kell megválasztani: egyrészt összhangban kell lennie az irányítandó folyamat dinamikájával, másrészt a real-time feldolgozó rendszer képességeivel (műveletvégző sebesség, számábrázolás pontossága). -A szabályozó kimenetének jelformája a tartószerv által meghatározott, nem szabadon választott. -A mintavételezés a tervezés számára kihívásokat jelentő járulékos tényezőket generál (holtidő, a mintavételezés következtében megjelenő dinamika).
. -A szabályozó kimenetének jelformája a tartószerv által meghatározott, nem szabadon választott. -A mintavételezés a tervezés számára kihívásokat jelentő járulékos tényezőket generál (holtidő, a mintavételezés következtében megjelenő dinamika)..")
7
Mintavételezés Shannon mintavételezési törvénye: A mintavételezést minimálisan olyan frekvenciával kell megvalósítani, hogy a folyamatos jel legnagyobb frekvenciájú komponenséből legalább két minta álljon rendelkezésünkre minden mintavételezési periódusban. A fizikai mintavételezés megvalósítása: analóg-digitális (A/D) átalakítókkal (konverterekkel) -Real-time rendszer órajelével vezérelt elemek -Periodikusan rövid időre záródó kapcsoló -Fontos: -Az átalakítás gyorsasága (konverziós idő) -Zavartűrő képesség -Digitalizált jel bitszélessége (felbontás), általában 8-16 bit között.
 átalakítókkal (konverterekkel) -Real-time rendszer órajelével vezérelt elemek -Periodikusan rövid időre záródó kapcsoló -Fontos: -Az átalakítás gyorsasága (konverziós idő) -Zavartűrő képesség -Digitalizált jel bitszélessége (felbontás), általában 8-16 bit között..")
8
Mintavételezés Matematikai mintavételezés

9
Mintavételezés Matematikai mintavételezés – frekvenciatartománybeli vizsgálatokra

10
Mintavételezés NYQUIST frekvencia

11
Mintavételezés Nemlétező frekvenciájú összetevő megjelenése

12
Tartás Tartószerv: -Vezérelt elem -Feladata: kódolt digitális jel fogadása, dekódolása és FI kimenőjel biztosítása két mintavételi időpillanat között. -A két mintavételi időpillanat közötti tartás jellegére nincsenek korlátozó előírások Zérusrendű tartószerv: két mintavételi időpillanat között konstans értékű tartószerv

13
Tartás Elsőrendű tartószerv

14
Tartás Zérusrendű tartószerv (ZOH – Zero Order Holding) komponensei Átviteli függvénye
 komponensei Átviteli függvénye")
15
Tartás Zárt szabályozási rendszer elemei és jelei

16
Z-transzformáció z-transzformáció: DI jelek, illetve jelek kapcsolatát megvalósító rendszerek leírásának módszere. z – a z-transzformáció komplex értékű változója Inverz Z-transzformáció:

17
A z-transzformáció alaptulajdonságai

18
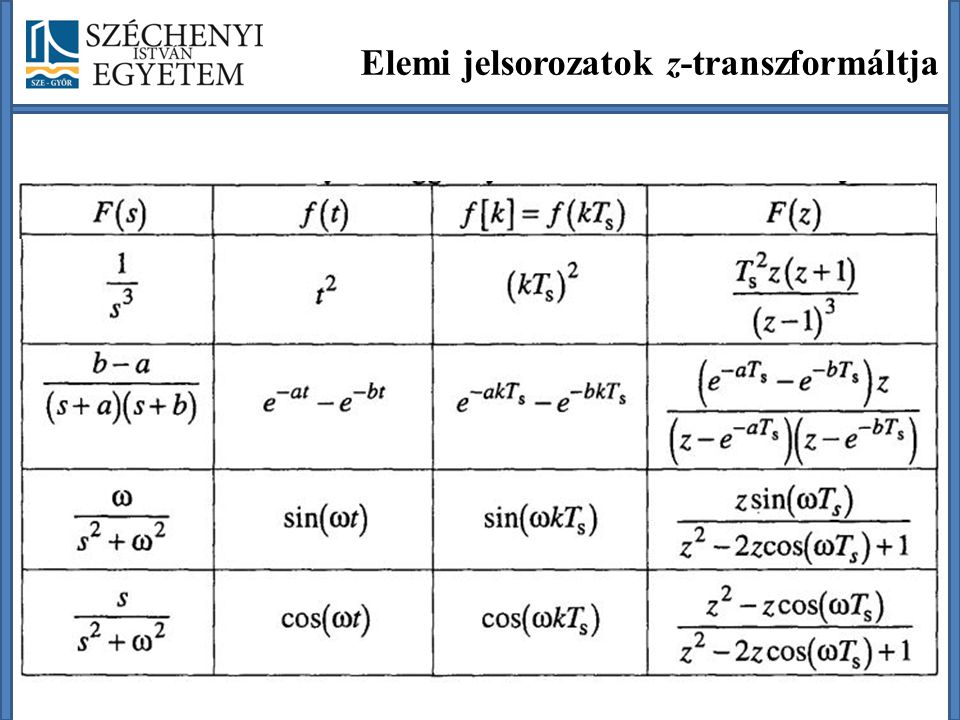
Elemi jelsorozatok z-transzformáltja

20
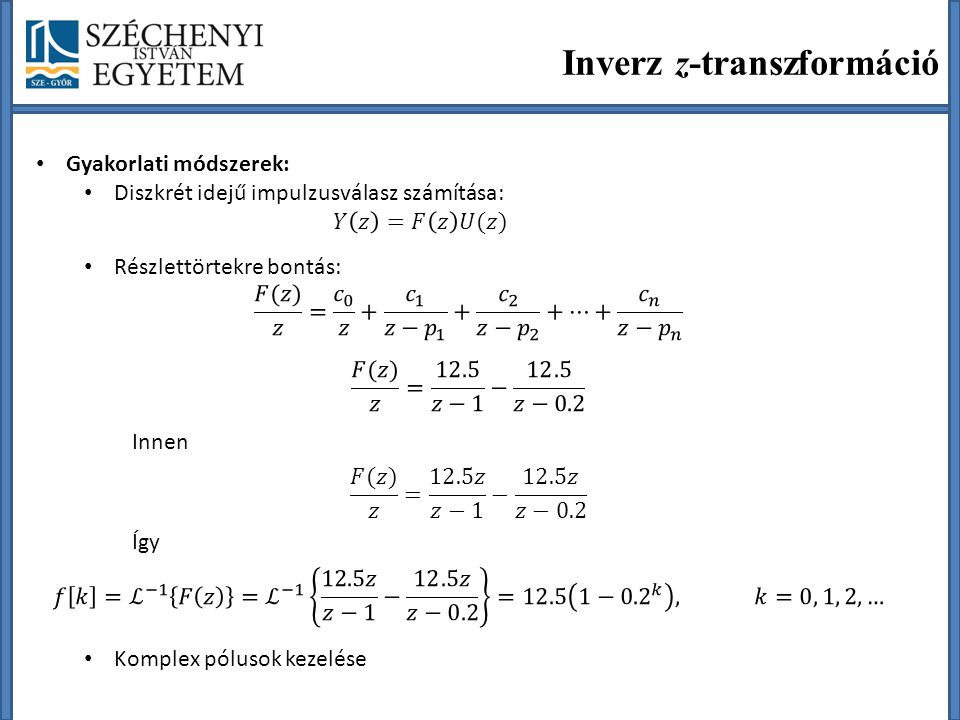
Inverz z-transzformáció












 tervezése>")



>")
>")



 Egy lineáris, kauzális, invariáns DI rendszer>")