Előadást letölteni
1
A MOZGATÓRENDSZER BIOMECHANIKÁJA

2
AZ ÍZÜLETEK BIOMECHANIKÁJA

3
SUGGESTED READINGS Nordin, M., Frankel, V.H. Basic biomechanics of the musculoskeletal system, Lea & Febiger 1989. Norkin, C.C, Levangie, P.K. Joint structure & function. Davis Company, Philadelphia.1992. Zatsiorsky, V.M. Kinematics of human movement. Human Kinetics, 1998. Enoka, R. Neuromechanical basis of kinesiology Human Kinetics, 1994.

4
Transzverzális v. vízszintes
Az emberi test síkjai Koronális v. frontális Transzverzális v. vízszintes Szagittális v. oldal

5
Tengelyek Longitudinális – Szagittális és frontális
Anteroposterior – Szagitális és transzverzális Lateromediális – Frontális és transzverzális

6
Kardinális síkok és tengelyek
Helyi referencia rendszer

7
kifelé – befelé forgatás Lateromedial v. szélességi
KARDINÁLIS SÍKOK TENGELYEK Izületi mozgás FRONTÁLIS Közelítés - távolítás OLDAL feszítés - hajlítás TRANSZVERZÁLIS kifelé – befelé forgatás Hosszúsági Jobbra -balra Anteroposterior v. mélységi jobbra -balra Lateromedial v. szélességi Előre - hátra

8
Szélességi tengely (térdfeszítés – hajlítás )
")
9
Mélységi tengely (oldalra hajlítás, közelítés-távolítás )
")
10
Hosszúsági tengely (törzsforgatás, everzió-inverzió )
")
11
Kettő vagy több csont összeköttetése inak, szalagok és izmok által
Ízület Kettő vagy több csont összeköttetése inak, szalagok és izmok által 148 Mozgatható csont 147 izület

12
Izületi szög Kiegészítő (belső) 100° Kiegészítő (belső) 180°
Anatómiai (külső) 80° Anatómiai (külső) 0°
 80° Anatómiai (külső) 0°")
13
IZÜLETI SZÖGELFORDULÁS

14
MOZGÁSTERJEDELEM (ROM)
ROM = dmax - dmin ROM A mozgásterjedelem azt a legnagyobb izületi szögelfordulást jelenti egy ízületi tengely körül, amely anatómiailag még lehetséges

15
Passzív mozgásterjedelem > aktív mozgásterjedelem
Aktív mozgásterjedelm Passzív mozgásterjedelem Passzív mozgásterjedelem > aktív mozgásterjedelem

16
A mozgásterjedelmet befolyásoló tényezők
1. Az izületek típusa 2. Az izületi szalagok mechanikai tulajdonságai nyúlékonyság merevség 3. Az izmok és inak anatómiai és biomechanikai jellemzői Izom és ínhosszúság illetve a kettő aránya Izom architektúra

17
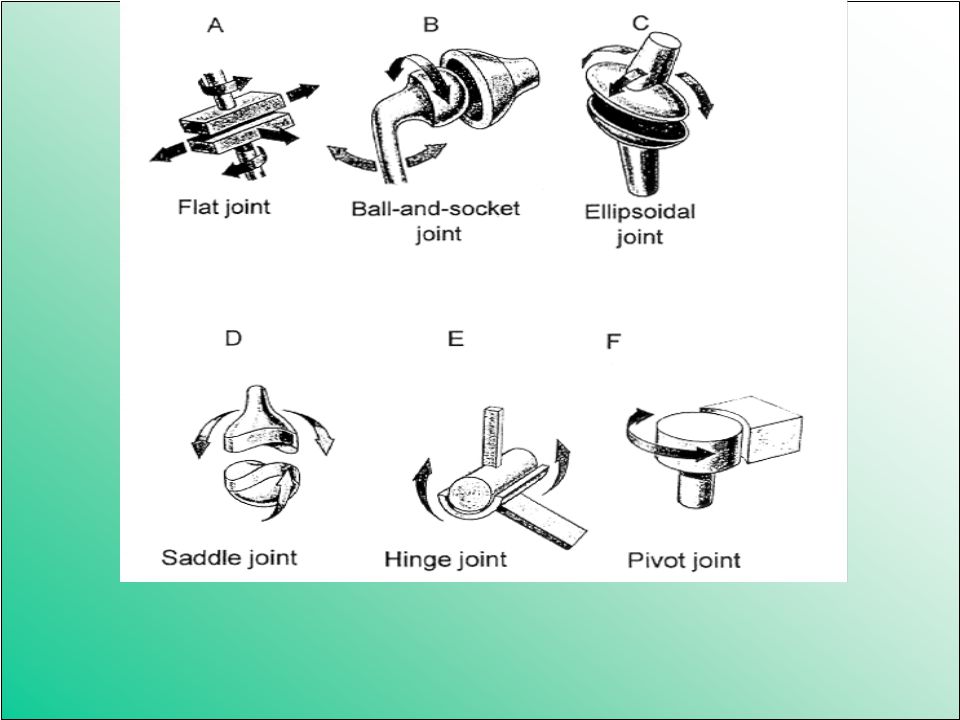
Az izületek típusai 1. Két csont (térd)
2. Több csont (lábközép csontjai) egy tengelyű (henger) Két tengelyű (elliptikus, tojás) Három tengelyű ( gömb)
 egy tengelyű (henger) Két tengelyű (elliptikus, tojás) Három tengelyű ( gömb)")
19
Rostos szövetek által kapcsolt
Az izületek típusai típus leírás funkció mozgás példák semmi v. kicsi tibia/ fibula fej Rostos szövetek által kapcsolt stabil Rostos sterno costalis Porcos összeköttetés hajlás kicsi Porcos Szalagokkal összekapcsolt Kicsi transzláció nagy rotáció térd, csípő Szinoviális mozgás

20
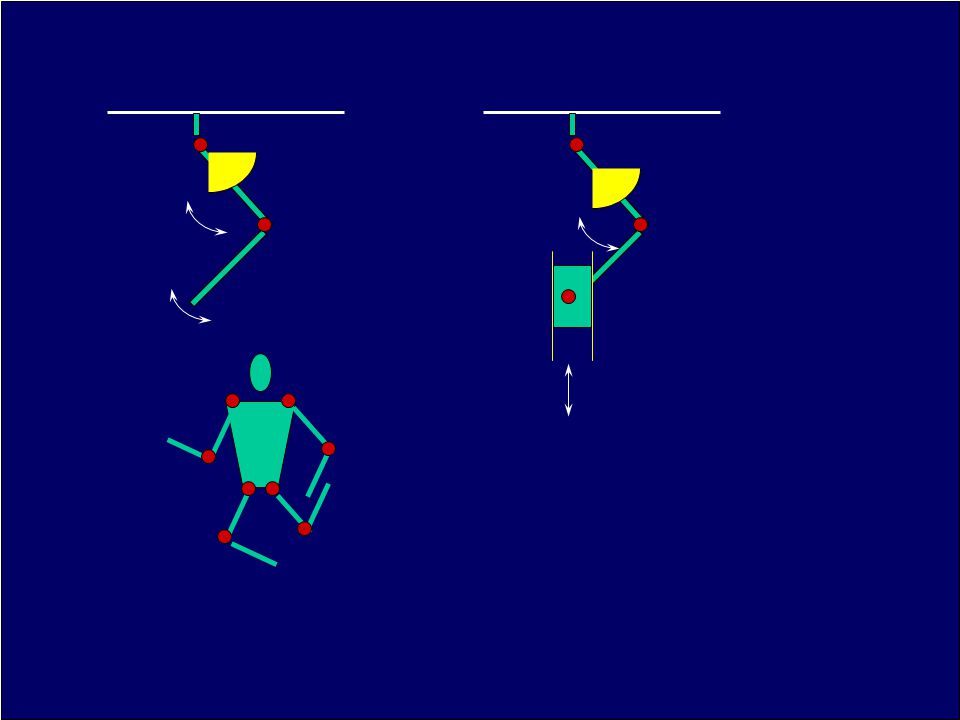
DOF = a koordináták száma minusz a megkötöttségek száma
SZABADSÁGFOK ( DOF) DOF a változóknak az a száma, amely a test mozgásának leírásához szükségesen elegendő DOF = a koordináták száma minusz a megkötöttségek száma transzláció rotáció 3 + 3 6
 DOF a változóknak az a száma, amely a test mozgásának leírásához szükségesen elegendő. DOF = a koordináták száma minusz a megkötöttségek száma. transzláció. rotáció")
21
Két dimenzió (2D) DOF = 3N - C Három dimenzió (3D) DOF = 6N - C
N = a testszegmentek száma, C = a megkötöttség száma

22
Megkötöttség Anatómiai adjunctus (független)
Conjunctus vagy összekötött ( az izületek mozgása egymástól függ)
")
24
Aktuális (pedálozás) Mechanikai (egyensúly, megcsúszás)
Motoros feladat ( instrukció)
")
25
A kinematikai lánc mobilitása
F = 6N - å i • ji 5 I=3 F = mobilitás, I = az izület osztálya, ji = az izületek száma az I osztályban i = 6 -f, f= a szabadságfok száma

26
F = (6•148) - [(3 •29) + (4 •33) + (5 •85)] = 244
Harmadosztályú izület: 29 (3 DOF) Negyedosztályú izület: 33 ( 2 DOF) Ötödosztályú izület: 85 ( 1 DOF) F = (6•148) - [(3 •29) + (4 •33) + (5 •85)] = 244 Maneuverability = 238
![F = (6•148) - [(3 •29) + (4 •33) + (5 •85)] = 244](http://slideplayer.hu/slide/2162395/8/images/26/F+%3D+%286%E2%80%A2148%29+-+%5B%283+%E2%80%A229%29+%2B+%284+%E2%80%A233%29+%2B+%285+%E2%80%A285%29%5D+%3D+244.jpg "Harmadosztályú izület: 29 (3 DOF) Negyedosztályú izület: 33 ( 2 DOF) Ötödosztályú izület: 85 ( 1 DOF) F = (6•148) - [(3 •29) + (4 •33) + (5 •85)] = 244. Maneuverability = 238.")
27
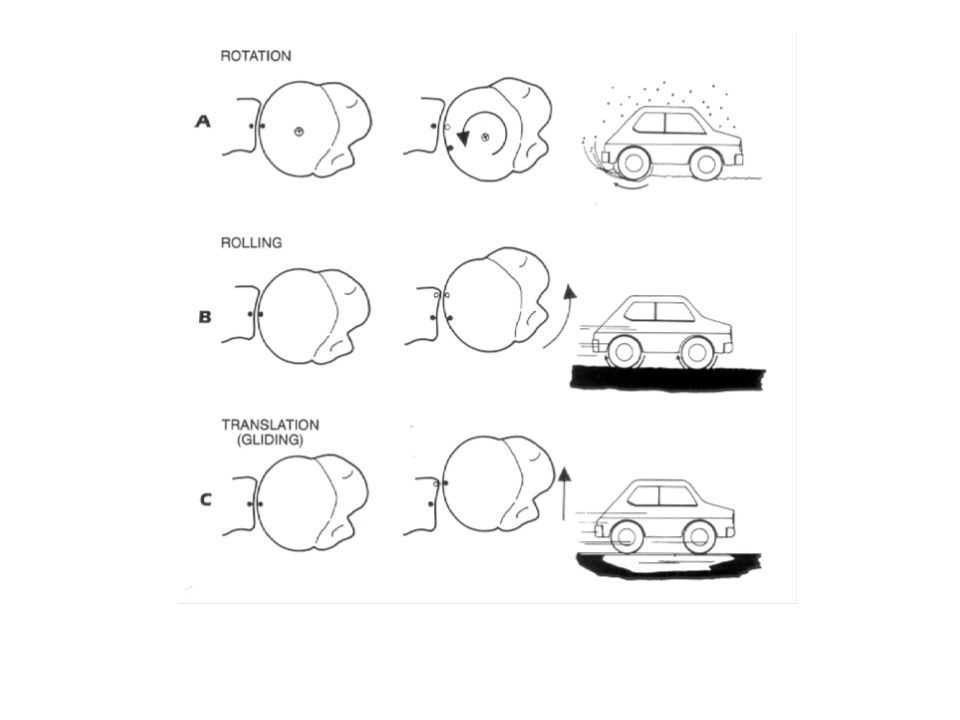
MOZGÁSOK AZ ÍZÜLETEKBEN

28
FORGÁS

29
Csúszás (lineáris és nem lineáris transzláció)
")
30
Gördülés = rotáció + transzláció

32
nem állandó csúszó henger állandó
rotaciós DOF transzlációs DOF Érintkezési felület izület gömb 3 2 1 1 2 állandó nem állandó tojás nem csúszó henger állandó csúszó henger állandó állandó nyereg

33
AZ IZÜLETEKRE HATÓ ERŐK

34
1. Nyomó (kompressziós) 2. Húzó (tenzilis) 3. Nyíró 4. Reakció
 2. Húzó (tenzilis) 3. Nyíró 4. Reakció")
35
A nyomóerő mindig merőleges a transzverzális síkra
A nyírőerő mindig párhuzamos a transzverzális síkkal A húzóerő mindig merőleges a transzverzális síkra Transverzális sík

36
Reakcióerő Fr = Ft Nyomóerő (Fc) Reakcióerő (Fr) (Fc) (Ft)
Nyíróerő (Fs) (Fs)
 (Fs)")
37
Reakcióerő Fr (Fc1) Fc1 Fs1 Fs2 Fc2 Fc Fc2 Fs1 Fs2 Fs
 Fc1 Fs1 Fs2 Fc2 Fc Fc2 Fs1 Fs2 Fs")
38
AZ ERŐK MEGHATÁROZÁSÁNAK MÓDSZEREI
1. GRAFIKUS 2. SZÁMÍTÁS 3. MÉRÉS 4. MÉRÉS ÉS SZÁMÍTÁS statikus és dinamikus direkt és inverz

40
Nyomaték egyensúly Tiszta nyomaték = (Fm x dF) – (W1 x dW1) + (W2 x DW2) = 0 (Fm x dF) = (W1 x dW1) + (W2 x DW2) Mm = M1 + M2 izometriás Mm > M1 + M2 koncentrikus Mm < M1 + M2 excentrikus

41
Erőkar rendszer

42
Első osztályú emelő Másodosztályú emelő

43
Harmadosztályú emelő

44
1st 2nd 3rd

45
NYOMÓERŐ HÚZÓERŐ G1+ G2 G1 Fk = G1 G2 Fh = G2 G1+ G2

46
Fk = G1 +F1 +F2 G1+ G2 NYOMÓERŐ HÚZÓERŐ F1 F2 G1 G2 Fk =(F1 +F2) -G2
 -G2")
47
NYÍRÓERŐ G = Gny G Gny Gh Gny G

48
A G súlyerő húzó-, és nyíróerő komponenseinek meghatározása
Fh G Fny

49
A G erő nyomó-, és nyíróerő komponenseinek meghatározása
Fk Fny G

50
A végtagok súlyerejének hatása az ízületekre
d =mért = d d Gh Transzverzális sík Gny G

51
A G súlyerő húzó- és nyíróerő komponens értékeinek kiszámítása
d =megmért = d = ’ = ’ Gny = FG cos Gh= FG sin d Gh ’ G Gny

52
Gk Transzverzális sík Gny G

53
A forgatónyomaték kiszámítása dinamikus erőkifejtés során

54
Forgatónyomaték (M) Statikus helyzetben
mg k Erő(teher) kar= a forgáspontból az erő hatásvonalára bocsátott merőleges egyenes hossza m= 5 kg r= 0,2 m = 45 k = 0,14 m
 kar= a forgáspontból az erő hatásvonalára bocsátott merőleges egyenes hossza. m= 5 kg. r= 0,2 m. = 45 k = 0,14 m.")
55
Forgatónyomaték (M) Dinamikus körülményben m= 5 kg r= 0,2 m t= 0,05 s
= 45 = 0,785 rad = 900/s = 15,7 rad/s m r

56
Fi = Fmért • k / ki Fmért • k = Fi • ki Erőmérés M = Fmért • k
Mi = Fi • ki Fi Fmért • k = Fi • ki Fi = Fmért • k / ki ki k Fmért

57
Erőmérés ki k Fmért Fi F F= Fmért · sin ϴ M= F · k Mi= Fi · ki
Fi=F · k/ ki

58
Erőmérés k1 ki Fmért M= Fmért · k1

60
F

61
Az izomerő (Fm) kiszámítása
FG · lG = Fi · ki Fi Fi = G · kG / ki ki kG G

62
Az Fi erő nyomó- és nyíróerő komponens értékek kiszámítása
Fi = FG · kG / ki Fi Fik = Fi · cosa Fik Finy Finy = Fi · sin a a G Fik – az izom által kifejtett erő nyomó vagy kompressziós (k) erő komponense; Finy - az izom által kifejtett erő nyíróerő (ny) komponense
 erő komponense; Finy - az izom által kifejtett erő nyíróerő (ny) komponense.")
63
Az Fi erő nyomó- és nyíróerő komponensének kiszámítása
Finy = Fi · sin a Fi Fik = Fi · cos a Fik Gny = G · cos Finy a Gh= G · sin åFny = Finy +(- Gny) Gh Gny åFk = Fik + (- Gh) G
 Gh. Gny. åFk = Fik + (- Gh) G.")
64
A REAKCIÓERŐ KISZÁMÍTÁSA
åFny = Finy +(- FGny) Fi åFk = Fik + (- FGh) Fik Finy Fr Gh Gny G
 Fi. åFk = Fik + (- FGh) Fik. Finy. Fr. Gh. Gny. G.")
65
åFny = Finy + (-Gny) åFk = Fik + Gk Transzverzális sík Finy Fi Fik Gk
 åFk = Fik + Gk Transzverzális sík Finy Fi Fik Gk")
66
A G erő húzó- és nyíróerő komponens értékeinek kiszámítása
d =mért e = d e = e’ b = e’ Gny = G cos b Gk= G sin b e d e’ Gh b Gny G

67
Az izomerő (Fm) kiszámítása
G · lG = Fm · lFm Fm Fm = G · lG / lFm lFm lG G

68
Az Fm erő nyomó- és nyíróerő komponens értékek kiszámítása
Fm = G lG / lFm Fm Fmk = Fm cosa Fmk Fmny Fmny = Fm sin a a G

69
Az Fm erő nyomó- és nyíróerő komponensének kiszámítása
Fmny = Fm sin a Fm Fmk = Fm cos a Fmk Gny = G cos b Fmny Gh= G sin b åFny = Fmny +(- Gny) Gh Gny åFk = Fmk + (- Gh) G
 Gh. Gny. åFk = Fmk + (- Gh) G.")
70
A REAKCIÓERŐ KISZÁMÍTÁSA
åFny = Fmny + (-Gny) Fm åFk = Fmk + (-Gh) Fmk Fmny Fr Gh Gny G
 Fm. åFk = Fmk + (-Gh) Fmk. Fmny. Fr. Gh. Gny. G.")
















 2. Húzó (tenzilis) 3. Nyíró 4. Reakció.>")





