Előadást letölteni
1
GÉPIPARI AUTOMATIZÁLÁS II.
7/2. előadás PLC gyakorlatok

2
Jellegzetes PLC típusok
CPM1A (Omron) LOGO (Siemens)
 LOGO (Siemens)")
3
Jellegzetes PLC típusok
S 5 – 115 U (Siemens) S 7 – 300 (Siemens) Egy PLC rendszerben az alábbi egységeket találhatjuk meg
 S 7 – 300 (Siemens) Egy PLC rendszerben az alábbi egységeket találhatjuk meg.")
4
Kompakt PLC felépítése

5
Moduláris PLC felépítése

6
PLC-k fő egységei

7
A PLC –k program típusai
A mai PLC-ket kivitelük alapján kompakt és moduláris felépítésű csoportba sorolhatjuk. A kompakt PLC jellemzője: Felhasználási területei a sorozatban gyártott gépek, berendezések automatikái, illetve egyedi vezérlések. A moduláris felépítésű programozható logikai vezérlők jellemzője: hogy a vezérlőberendezés valamely speciális funkciót önmagában ellátó modulokból épül fel. Felhasználási területei közepes, ill. nagyméretű rugalmas gyártórendszerek vagy ipari folyamatok irányítása

8
Programok szerkezete

9
Program modulok S 5 és S 7 (Siemens)
")
10
PLC program nyelvek IL - Instructionlist AWL - Anweisungliste
LD - Ladder diagramm KOP – Kontanktplan FB – Funktions Blokk FUP - Funktionsplan

11
Létradiagrammos programozási mód (LD, KOP)
A bemenetek és kimenetek kapcsolatait egy áramúttervhez hasonló ún. létradiagrammban grafikusan ábrázoljuk. A bemenetek ábrázolásához használt jelképek: Záró érintkező: ] [--- Bontó érintkező: ---]/[--- A kimenetek ábrázolásához használt jelképek: Bekapcsolás (SET) ----( )---- Kikapcsolás (RESET) ----(/)----
 ----( )---- Kikapcsolás (RESET) ----(/)----")
12
Funkcióblokkos programozás
Ez a programnyelv is egy grafikus programozási mód. A bemenetek és a kimenetek közötti függvénykapcsolatot logikai jelképekkel adjuk meg. ÉS függvény VAGY függvény Logikai tagadás (NEM) /bemenetek/ /kimenet/ & ≥1 1
 /bemenetek/ /kimenet/ & ≥1. 1.")
13
Ciklikus utasítás feldolgozás
a rendszer „ms” ciklusidővel a bemeneti állapotot állandóan lekérdezi. Ha az állapot változik, a bemeneti jelek aktualizálódnak és a programozott műveletek elvégzése után a kívánt kimeneti jelek létrejönnek. Az összes kimenet kapcsolása egy időben történik a ciklusidő és a reakcióidő függ a felhasználói program hosszától és az utasítások típusától Pl: OMRON, SIEMENS PLC-k

14
Kimenetek, bemenetek, belső változók címzése
A be- és kimeneti jeleket (változókat), a belső változókat, valamint az időzítőket, számlálókat címezni kell. A címzés egy jellemző betűből (operandus / változó) és egy számból (paraméter) áll. Pl.: E1, E2, A1, M5 stb. Belső változó (merker) –egy bites memória egység, jelállapot átmeneti tárolására használjuk. Ugyanúgy működnek mint a kimenetek csak nincsenek elektromosan kivezetve. Jele (német) (angol) Bemenet E (=Eingang) I (=Input) Kimenet A (=Ausgang) O (=Output) Belső változó M (=Merker) F (=Flag) Állandó K (=Konstans) Időtag T (=Timer) Számláló Z (=Zahler) C(=Count) Program egység P Hálózat NW(=Netzwerk) NW(=Network)
, a belső változókat, valamint az időzítőket, számlálókat címezni kell. A címzés egy jellemző betűből (operandus / változó) és egy számból (paraméter) áll. Pl.: E1, E2, A1, M5 stb. Belső változó (merker) –egy bites memória egység, jelállapot átmeneti tárolására használjuk. Ugyanúgy működnek mint a kimenetek csak nincsenek elektromosan kivezetve. Jele. (német) (angol) Bemenet. E (=Eingang) I (=Input) Kimenet. A (=Ausgang) O (=Output) Belső változó. M (=Merker) F (=Flag) Állandó. K (=Konstans) Időtag. T (=Timer) Számláló. Z (=Zahler) C(=Count) Program egység. P. Hálózat. NW(=Netzwerk) NW(=Network)")
15
Utasítás listás programozás (IL, AWL)
Az utasításlistás programozás esetén a különböző bemeneti feltételeket valamint a bemenetek és a kimenetek kapcsolatait szöveges utasítások rövidítéseivel programozhatjuk. Művelet Jele (német) Jele (angol) Logikai összeadás (VAGY) O (=Oder) O (=Or) Logikai szorzás (ÉS) U (=Und) A (=And) Logikai tagadás N (= Nicht) N (=No) Betöltés L (=Laden) L (=Load) Nullművelet NOP (= Nicht Operandus) NOP (=No Operandus) Hozzárendelés kimenethez =
 Jele (angol) Logikai összeadás (VAGY) O (=Oder) O (=Or) Logikai szorzás (ÉS) U (=Und) A (=And) Logikai tagadás. N (= Nicht) N (=No) Betöltés. L (=Laden) L (=Load) Nullművelet. NOP (= Nicht Operandus) NOP (=No Operandus) Hozzárendelés. kimenethez. =")
16
Bemutató példa

17
Logikai alapkapcsolások
ÉS függvény KOP AWL FUP E1 L E1 U E2 =A1 PE A1 & E2 A programok a legtöbb esetben ÉS, VAGY valamint NEM kapcsolatokból állnak.

18
Logikai alapkapcsolások
VAGY függvény KOP AWL FUP E1 L E1 O E2 =A1 PE A1 ≥1 E2

19
Logikai alapkapcsolások
NEM függvény KOP AWL FUP E1 L NE1 =A1 PE A1 1

20
Logikai kapcsolások 1 & & L E1 U E2 =A1 L E2 U NA1 =A2 PE E1 A1 E2 A2
A bonyolultabb feladatok a három alapfüggvény segítségével megoldhatóak E2 1 A2 & E2

21
Logikai kapcsolások L E1 U E2 OE3 =A1 =A2 PE E1 & A1 E2 ≥1 E3 A2

22
Logikai kapcsolások L ( O E1 O E3 ) UE2 =A1 PE E1 ≥1 E3 A1 & E2
 UE2 =A1 PE E1 ≥1 E3 A1 & E2")
23
Logikai kapcsolások L E1 U E2 O UE3 UE4 =A1 PE E1 & A1 E2 ≥1 E3 & E4

25
Tartó kapcsolások

26
Tartó kapcsolások

27
Merker (közbenső tároló)
")
28
Merker (közbenső tároló)
")
29
Élfigyelés

30
Élfigyelés

31
Időzítés programozása
Cx – Programmer (Omron)
")
32
Időzítés programozása
Cx-Programmer (Omron)
")
33
Bekapcsolás késleltetés_TON (S7-200)
")
34
On-Delay Időzítő (TON)
")
35
Időzítés programozása
S 5 és S 7 (Siemens)
")
36
Időzítés programozása
FEC (Festo)
")
37
Időzítés programozása
FEC (Festo)
")
38
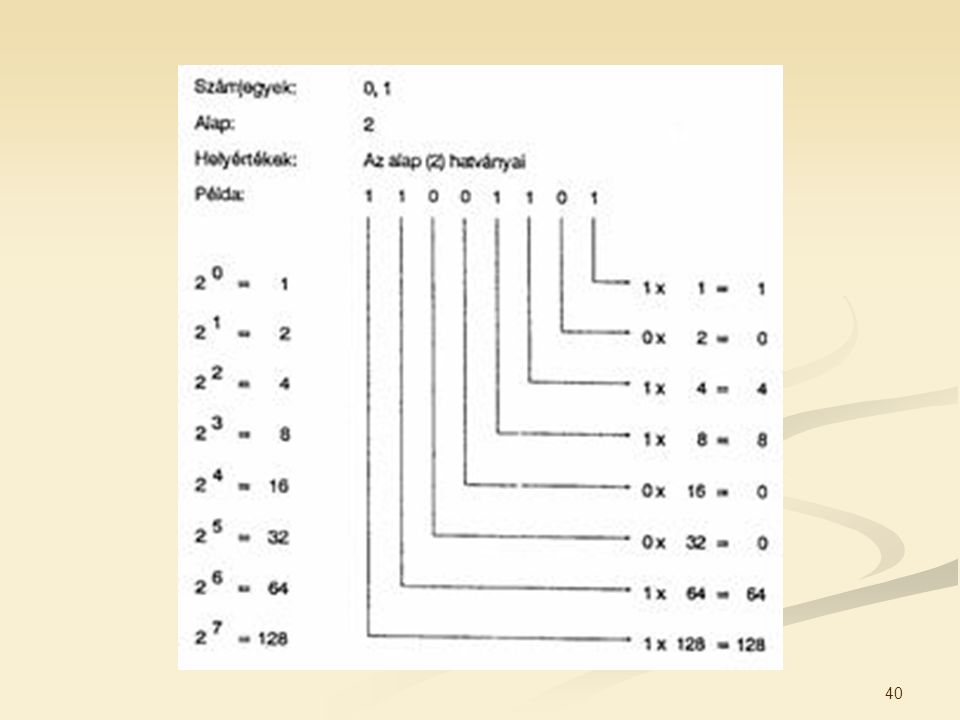
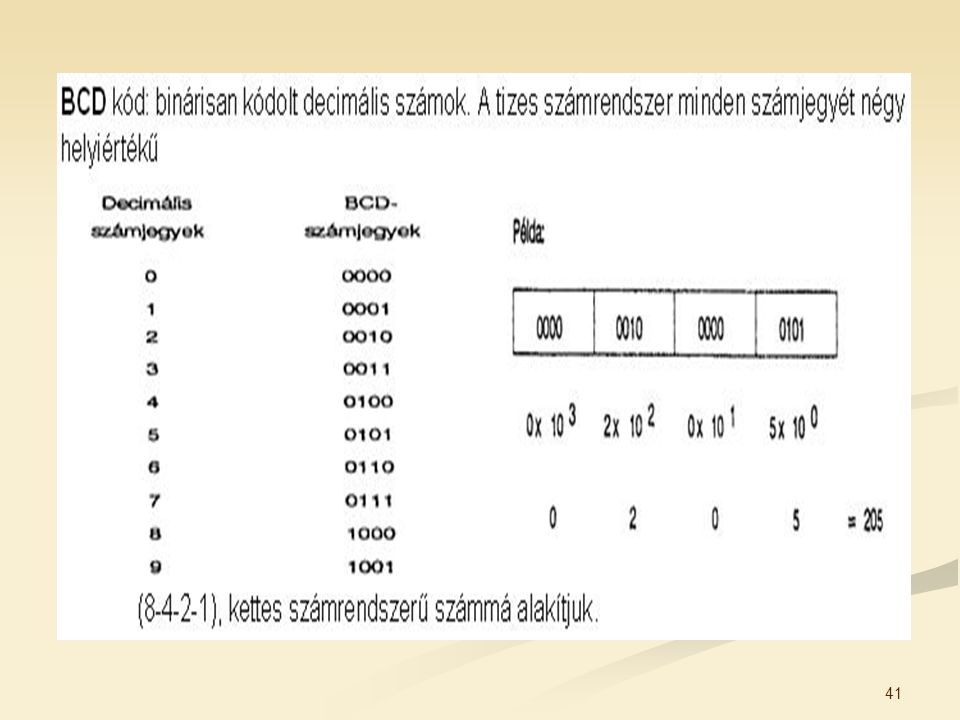
Számrendszerek fogalmai

39
Számrendszerek fogalmai

42
Számlálás programozása

43
Számlálás programozása

44
Előre/vissza számlálás (CTDU)
")
45
Előre/visszaszámláló utasítás (S7-200)
")
46
Számlálás programozása
FEC (Festo)
")
47
Számlálás programozása
FEC (Festo)
")
48
Gyakorló feladat

49
Gyakorló feladat

50
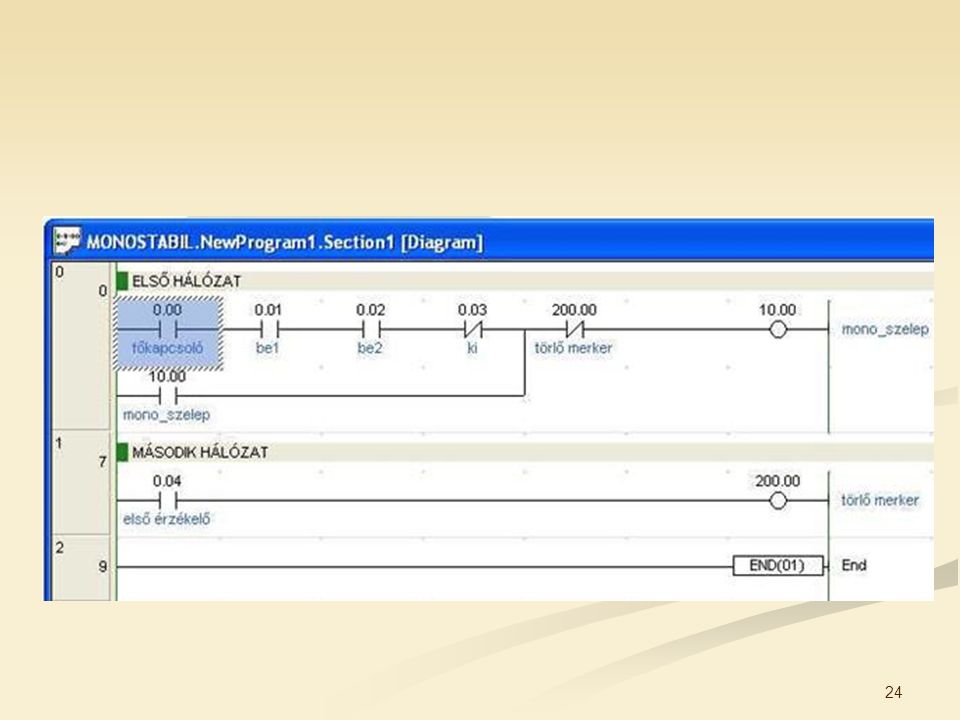
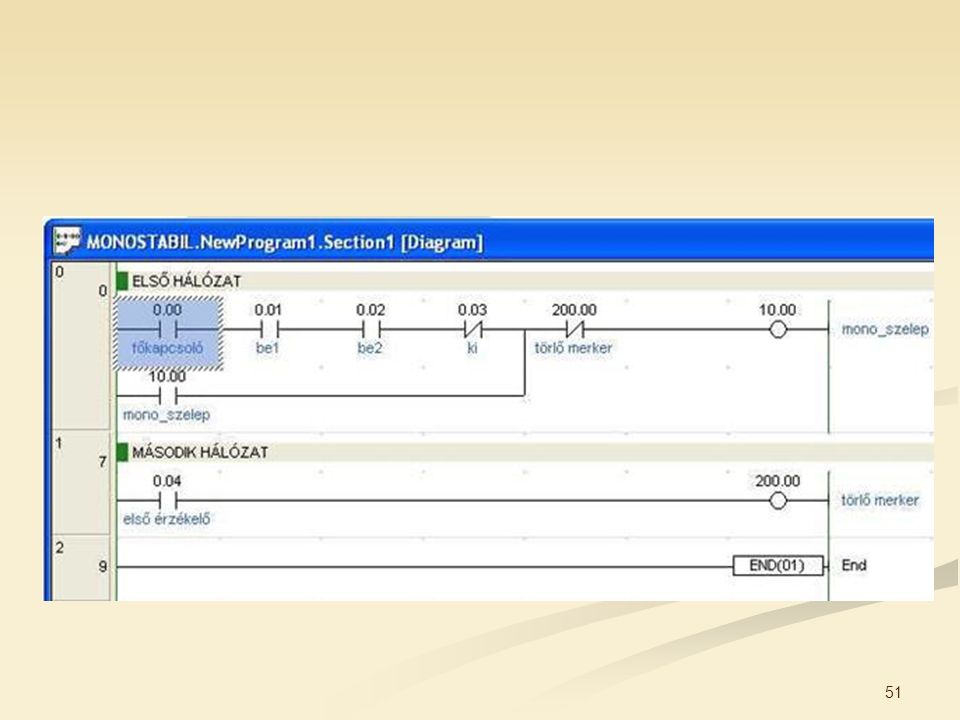
Gyakorló feladat Változók listája / Hozzárendelési lista
Feladat: Egy berendezésben monostabil szelepet alkalmazunk. Az indítás főkapcsolóval és kétkezes módszerrel, a leállítás kikapcsolóval. történik A dugattyú az első helyzet elérése után álljon alaphelyzetbe. Változók listája / Hozzárendelési lista Abszolút címzés Szimbolikus címzés Megjegyzés (Kommentar) 0.00 S0 főkapcsoló 0.01 S1 Be_1 0.02 S2 Be_2 0.03 S3 kikapcsoló 0.04 S4 első érzékelő
 S0. főkapcsoló S1. Be_ S2. Be_ S3. kikapcsoló S4. első érzékelő.")
52
Feladat Készítse le az ábrán látható marógép PLC –s vezrélését.
Működése: Befogóhenger szorít (A+) Előtolás előre (B+) Előtolás vissza (B-) Befogóhenger vissza (A-)
 Előtolás előre (B+) Előtolás vissza (B-) Befogóhenger vissza (A-)")
53
Megoldás Pneumatikus körfolyam:

54
Megoldás ÚT-LÉPÉS diagramm

55
Megoldás Bemeneti és kimeneti változók listája Abszolút címzés
Szimbolikus címzés Megjegyzés E1 S1 „A” henger alaphelyzeti érzékelője E2 S2 „A” henger pozitív helyzeti érzékelője E3 S3 „B” henger alaphelyzeti érzékelője E4 S4 „B” henger pozitív helyzeti érzékelője E5 S5 START (főkapcsoló) A1 Y1 „A” henger pozitív irányú mozgatása A2 Y2 „A” henger negatív irányú mozgatása A3 Y3 „B” henger pozitív irányú mozgatása A4 Y4 „B” henger negatív irányú mozgatása
 A1. Y1. „A henger pozitív irányú mozgatása. A2. Y2. „A henger negatív irányú mozgatása. A3. Y3. „B henger pozitív irányú mozgatása. A4. Y4. „B henger negatív irányú mozgatása.")
57
Előre/vissza számlálás (CTDU)
")
58
Előre/visszaszámláló utasítás (S7-200)
")
59
Bekapcsolás késleltetés_TON

60
Megoldás PLC bekötési vázlata

61
Köszönöm a figyelmet!









>")




 7) 8) 9) 10) Mennyi az x, y és z értéke? 11) 12) 13) 14) 15)>")







