Előadást letölteni
1
Járműhajtásra alkalmazott permanens mágneses szinkron motorok néhány fejlesztési és irányítási kérdése Helyszín, dátum

2
Előadó dr Szénásy István
Járműhajtásra alkalmazott permanens mágneses szinkron motorok néhány fejlesztési és irányítási kérdése

3
Változtatható fordulatszámú, önvezérelt szinkronmotor
megjelent mozdonyban : robot- és ipari szervohajtásban: autóban: A kifejlesztett forgórész-elrendezések és mágneskörök széles kutatási területet ölelnek fel. A forgórészben lévő mágnesek erővonalai a villamos gép főfluxusát jelentik, de a található sok alaki változat a kiterjedt irodalom ellenére is számos további kutatási feladatot kínál.

4
A használatos főbb mágnes elrendezések és –alakok:

5
A mágneses tengelyek irányai a forgórész-lemeztestben:
A mágneses ellenállások irány- és hely szerinti tudatos választása jelentős hatású nyomatéknövelést, illetve méretcsökkenést eredményez, és amelynek szélesebbkörű keresése vállalható feladat. Az előbbiekből elért reluktancia-nyomaték egyes motorokban már 50% feletti hozzájárulású. A mágneses tengelyek irányai a forgórész-lemeztestben: A hidak feladata a mágnes és környéke tömegének mechanikai tartása

6
A reluktancianyomaték a d- és q irányú induktivitás-különbséggel arányos:

7
Jelentős mechanikai problémákat okoz a 10-13 ezer/p
fordulatszámon fellépő igénybevétel és mérséklése a mágnessel határolt szakasz kiszakadása ellen A híd feszültségviszonyai 5683/ fordulatszámon: A híd terhelése kritikus:

8
A sebesség kiterjesztése konstans feszültségen
A feszültség a névleges sebességig arányos, e felett a nyomatékcsökkenés a P=állandó hiperbola szerinti, vagy ahhoz közelítő. A sebesség kiterjesztése változatlan kapocsfeszültség mellett csak mezőgyengítéssel lehetséges, amely a már említett reluktancia-nyomaték érvényesítéséhez is szükséges áramvektorszabályozással realizálható

9
a kis-, a névleges- és a nagy sebességű üzem áramvektoraival
A sebesség növekedésével a feszültségvektor eléri megengedett értékét. Felette – mert a mágnes fluxusa állandó- a „-d” irányú áramvektorral csökkentjük a túlnövekedett belső feszültség hatását: A önvezérelt szinkron gép áramvektor- szabályozása mező- gyengítésben. Teljes vektorábra a feszültségösszetevőkkel:

10
Mágnes elrendezés és alak alkalmasság vizsgálatai, fejlesztések
Axiális fekvésű, és alatta normál lemezelésű, 3 és 4 mágnes-rétegezésű forgórészek: Részlet egy US Patent szabadalmi leírásából:

11
Az egyes rotorkeresztmetszet-fajtáknál elérhető mezőgyengítési lehetőség: az 5b-változat szerinti alakú mágneskör a legjobb, a többiek a névleges állapotban kisebb nyomatékot engednek meg Az ábra (jobb o.) tovább szűkiti a legjobbaknak tartható lemezalakok körét: a legkisebb vasveszteséget az 5b változat adja, a 2 Axlam-é kifejezetten megnő a nagyfeszültségű-nagysebességű tartományban.
 tovább szűkiti a legjobbaknak tartható lemezalakok körét: a legkisebb vasveszteséget az 5b változat adja, a 2 Axlam-é. kifejezetten megnő a nagyfeszültségű-nagysebességű tartományban.")
12
A táblázat meggyőzően mutatja az egyes lemezalakokkal elérhető
legnagyobb értékű sebességet, 1500/m névlegesről a 3-szoros vagy akár 5-szörös értékig. A legjobb a 4 gátas 5b, ennél az 5x sebesség is csak 20% teljesítmény-csökkenést hoz, sőt, a 3x-nál kissé még nőtt is.

13
A rotor-konstrukció egyes részleteinek hatása a mezőgyengítés lehetőségeire: a csökkenő mágnesszélesség előnyösebb: a csökkenő mágnesvastagság előnyösebb

14
Az egyes cégek által kifejlesztett állandó-mágneses szinkron motorok magas elméleti-tervezési színvonala és gyártási technológiája alkalmazástechnikai fejlesztésre ösztönöz: A REMY.Co. szinkron motorjának külső képe és különleges gyártástechnológiát igénylő állórész-tekercselése

15
A Toyota hibrid LS600-as állórésze és tekercselése
A hatásfok-jellegmező az LS-600 szinkron motorban:

16
Egy mezőgyengítés vezérlésére, és az áramvektor-szabályozásra is alkalmas mikroprocesszoros irányítás struktúrája:

17
A motor hűtése a sebességváltó olajkörében történik
A motor hűtése a sebességváltó olajkörében történik. A mágnes Br indukciója hőfokfüggő, melegedésével nyomatékcsökkenés jön létre. A rotormelegedés hőátvitelének mértéke a mágnesekre (Prius):
:")
18
A lüktető nyomaték a fogpulzációból származik:

19
A kisteherautóba tervezett szinkronmotor (M=250Nm, n=3000/p)
induktanciái, tömege, veszteségei és névlegesponti hatásfoka:

20
A tervezésnél figyelembevett főbb szempontok:
mérsékelt indukció a vasveszteség csökkentésére, lehető nagy légrés, az elérhető minimális lüktető nyomaték, a mágnes geometriával és légréssel változtatva, 95 % körüli hatásfok, kis réz- és vasveszteséggel, lehetőség szerinti kis gépméret és tömeg, kész állórészlemez felhasználhatósága, költségcsökkentés miatt (48 hornyos volt elérhető, 60-as nem), nagy rézkeresztmetszet befektethetősége, az állórészhorony térfogatának maximalizálása, színuszoshoz közeli állórész indukció-eloszlás elérése, egyszerű, szimmetrikus tekercselhetőség.
, nagy rézkeresztmetszet befektethetősége, az állórészhorony térfogatának maximalizálása, színuszoshoz közeli állórész indukció-eloszlás elérése, egyszerű, szimmetrikus tekercselhetőség.")
21
A korszerű szimulációs programmal végzett kutatások
Az INFOLYTICA programcsomagjának megérkezése és tanulmányozása után megkezdtük a permanens mágneses szinkron motorok tervezési és szimulációs vizsgálati lehetőségeinek alkalmazását a villamos hajtású kisteherautó 2 db 30 kW-os névleges teljesítményű, palástra fektetett mágnesekkel ellátott szinkron motorjaira. A lehetséges vizsgálati és analizálási módszerek egy részét alkalmazva, számos megfigyelésre és értékes következtetésre juthattunk. Lehetőség nyílt a mágneskörök fluxusviszonyainak tanulmányozásra, az első ábrasorozat ezzel foglalkozik, majd a motor szinte minden működési üzemállapotának szimulált előidézésére, és a felkínált elemzési lehetőségek ábrákba foglalására. Így a teherautó névleges- és a nagyobb sebességű motoros -, továbbá a generátoros féküzemi tartományaiba is beleláthattunk, amelyek a névleges feletti sebességeken csak mezőgyengítéssel érhetők el és állíthatók be, s ezen a motortípuson összességében igen kedvező műszaki és energetikai jellemzőkkel és eredményekkel, amelyek az épülő motor jó tulajdonságait vetítik előre.

22
Névleges áramhoz tartozó indukcióértékek láthatók, amelyek a következő ábrákon az áramvektor 10 fokonkénti előbbre forgatásával változnak, itt 0 fok a beállítás. 22

23
Névleges áramhoz tartozó indukcióértékek láthatók, amelyek az áramvektor 10 fokonkénti előbbre forgatásával változnak, itt 10 fok a beállítás.

24
Névleges áramhoz tartozó indukcióértékek láthatók, az áramvektor 10 fokonkénti előbbre forgatásával változnak, itt 20 fok a beállítás.

25
Névleges áramhoz tartozó indukcióértékek láthatók, az áramvektor 10 fokonkénti előbbre forgatásával változnak, itt 30 fok a beállítás.

26
Névleges áramhoz tartozó indukcióértékek láthatók, az áramvektor 10 fokonkénti előbbre forgatásával változnak, itt 40 fok a beállítás.

27
Névleges áramhoz tartozó indukcióértékek láthatók, az áramvektor 10 fokonkénti előbbre forgatásával változnak, itt 50 fok a beállítás.

28
Névleges áramhoz tartozó indukcióértékek láthatók, az áramvektor 10 fokonkénti előbbre forgatásával változnak, itt 60 fok a beállítás.

29
Névleges áramhoz tartozó indukcióértékek láthatók, az áramvektor 10 fokonkénti előbbre forgatásával változnak, itt 70 fok a beállítás.

30
Névleges áramhoz tartozó indukcióértékek láthatók, az áramvektor 10 fokonkénti előbbre forgatásával változnak, itt 80 fok a beállítás.

31
Névleges áramhoz tartozó indukcióértékek láthatók, az áramvektor 10 fokonkénti előbbre forgatásával változnak, itt 90 fok a beállítás. A már 90 fokra előre fordított áramvektor a 0 fokos esethez viszonyítva jelentősen kisebb indukcióértékeket eredményez.

32
Motorüzemi állapot, névleges sebesség, feszültség, áram, teljesítmény
Motorüzemi állapot, névleges sebesség, feszültség, áram, teljesítmény. A hatásfok 93 %.

33
Kétharmad sebesség, feszültség és teljesítmény, a nyomaték névleges
Kétharmad sebesség, feszültség és teljesítmény, a nyomaték névleges. Az áramvektor szöge itt is 30 fok. Mivel az áram változatlan, a veszteség relatíve magasabb.

34
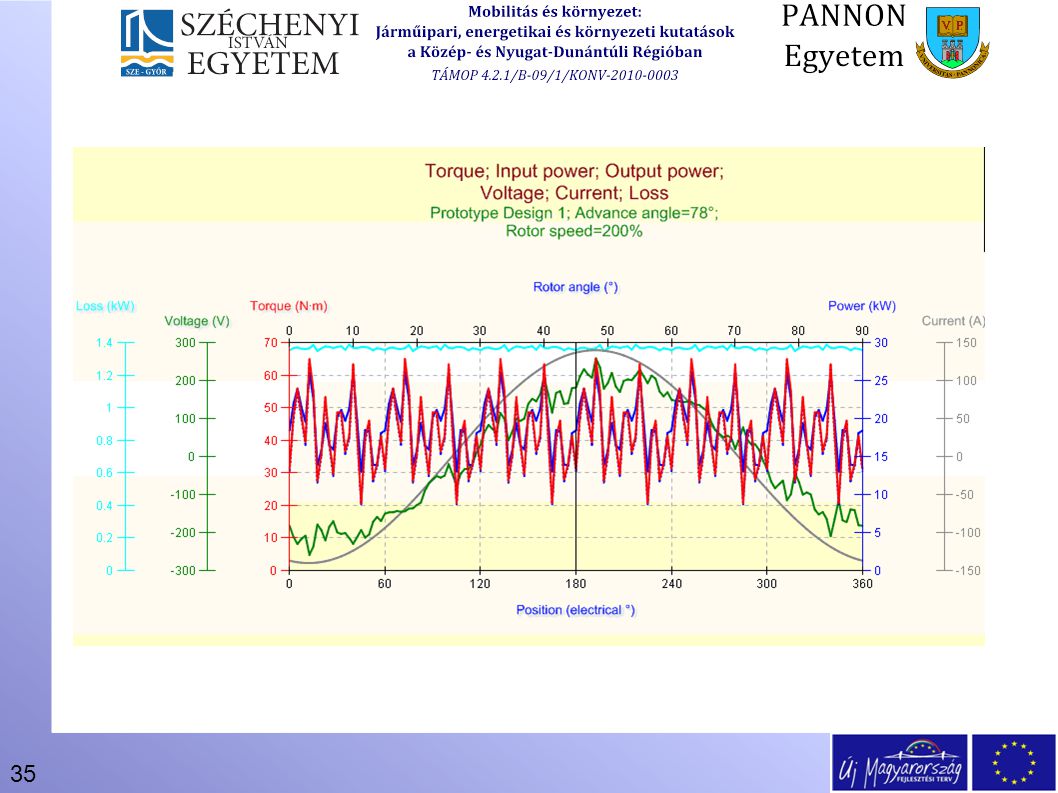
A kezdődő ábrasoron 100, 200 és 300%-os sebességek eléréséhez szükséges mezőgyengítés hatásai vizsgáltak, változatlan áram- és nyomaték értéknél, de u.azon áramvektor-szöghelyzetnél. Ez egy tipikusan várható résznyomatékot ad (55 Nm), amely gyakran lesz szükséges. A következő két ábrában csak a sebesség, és vele a teljesítmény nőtt.
, amely gyakran lesz szükséges. A következő két ábrában csak a sebesség, és vele a teljesítmény nőtt..")
36
Ha I=120A és a szög 75 fok, a veszteség esik, de P is, és nő az Mlükt, itt már közel 60%-os ! ( itt már 300% a sebesség)
.")
37
Három fok vektor visszaforgatás: Mlüktető jelentősen csökkent

38
A 78 fok beállítás túlzott:

39
A névleges sebességen (100%) itt kicsi az Mlükt:
 itt kicsi az Mlükt:")
40
A névleges sebességen a legjobb értékű Mlükt:

41
A kétszeres névleges sebességen a lehető legkisebb Mlükt: ez talán a legjobb mezőgyengítés, még megvan a 30 kW:

42
Az áram 140 –ről 110A-re, csökkentésével a veszteségek is esnek: a Pveszt 1,35kW-ról 0,96 –ra:

43
A szög 70-ről 64 fokra csökkentve: az Mlükt csökkent: (200 % a sebesség)
")
44
További 4 fok visszavétellel, 60-ra, az U értékét kissé hagytuk növekedni, és ezzel a veszteségek tovább csökkentek 0,86 kW-ra, ami már < 2,8 % !

45
További 2 fokkal visszavéve, U növekedése miatt (ami már alig tűrhető) Pveszt tovább csökkent:
 Pveszt tovább csökkent:")
46
További 4 fokkal csökkentve az előretartási szöget, és az áramot is 90 A-re, az U 550 V-ra nőne:

47
200 %-os sebességen ez a legjobb beállítás: 55 fok, és az áram 90 A, M itt a legtöbb, ~80 Nm, Pveszt 0,75 kW, U<500V, és a cos φ közel 1. Nagyon jó motortulajdon -ságok!

48
Ha az áramot 88A-ról 85-re, a szöget 55 fokról 52-re mérsékeljük, az áram szándékos fluxusrontó hatása mérséklődik, de ezt a vektor visszább fordítása kiegyenlíti: 500 V-on belül ez rendkívül jó eredmény! A Pveszt már csak 0,72 kW, Pout =33 kW mellett!

49
A szög további csökkentése: U>560, veszt ~0
A szög további csökkentése: U>560, veszt ~0.68 lenne, hatásfok 96 % feletti, de ebben az irányban csak még magasabb U-val lehetne haladni, ami már nem járható:

50
Féküzem: sebeség névleges, áramcsúcs 130 A, áramvektor szöge -140 fok, az elmélettel pontosan egyezően. A nyomaték -136 Nm, a Pout -27 kW.

51
A szöget 160 fokra növelve, minden érték javult: U 500 V alá esett, M=170 Nm, Pout 35 kW, Pveszt 1,27 kW-ra csökkent: javult a regeneratív hatásfok, 95 % feletti.

52
Ha az áramvektor szöge -180 fok, M=-180 Nm, Pout 37 kW, Pveszt 1,2 kW.

53
Csökkentett féknyomatékot az áramvektor-hossz csökkentésével, itt 70 A –el M=105 Nm-re állítottuk. A szög most is -180 fok, Pout =23 kW, Pveszt =0,48 kW.

54
A féknyomaték csökkentésekor – itt 47Nm- a nyomatéklüktetés növekszik
A féknyomaték csökkentésekor – itt 47Nm- a nyomatéklüktetés növekszik. Egyéb jellemzők itt is nagyon jók.

55
A nyomatéklüktetés itt kb
A nyomatéklüktetés itt kb Nm, mint előbb, de itt relatíve igen nagyra nőtt. Hatása talán az elfogadható értékek közt van. M=-17Nm, Pout kicsi, 3,5 kW, I=10A.

56
Mint előbb, de I=0 A, nincs féknyomaték, de Nm lüktetés igen, ami soknak tűnik, ezt az áramvektor visszaforgatásával lehet csökkenteni.

57
Itt PWM analízisben láthatók a jellemzők a rotor szögelfordulásának függvényében. A palástra ragasztott mágnesekkel nem állítható elő érdemi reluktancianyomaték.

58
Féknyomaték beállítása kétszeres sebességen: a fékteljesítmény > 55 kW, de a feszültség is > 600 V, nem megengedhetően sok.

59
Kétszeres sebesség, de az áram 50A értéke mellett, 240 fokos szögnél 15 kW a fékteljesítmény, 120 Nm-es, durva nyomatéklengésekkel: elkerülendő tartomány!

60
Itt az áram elég nagy, de szöge -60-os, rossz beállítású, és a feszültség 1200 V-ra nőtt, ami tönkreteheti az invertert. Ez szintén elkerülendő tartomány.

61
Itt is kétszeres sebesség, 90 fokos szögnél a feszültség csak 300 V, de a lüktetés Nm, közel zérus fékteljesítmény mellett. A nagy sebesség kellemetlen féküzem.

62
Ezen, és a következő ábrán ugyanazon (jó) névleges motorüzem görbéi láthatók, de a számítási-közelítési pontosság 1-es, illetve legfinomabb, 10-es beállításával.
 névleges motorüzem görbéi láthatók, de a számítási-közelítési pontosság 1-es, illetve legfinomabb, 10-es beállításával.")
63
Megfigyelhető, hogy a görbék középértékei ugyanazok, csak a kiugró értékek tűntek el a 10-szeres finomságú beállításnál. Az időráfordítás több, mint 100-szoros, itt 3 óra feletti volt.












 7) 8) 9) 10) Mennyi az x, y és z értéke? 11) 12) 13) 14) 15)>")

1/13 Kémények megfelelőségének értékelése Az engedélyezi eljárások egy lehetséges rendszere (valóság és fantázia )>")






