Előadást letölteni
1
Mérés és adatgyűjtés levelező tagozat
Elektromos mennyiségek mérése Mingesz Róbert 2014. április 4. v4.1

2
Tartalom Valós idejű rendszerek Programozható eszközök
Programozási környezetek Szenzorok Hőmérséklet mérése Fény érzékelése Mágneses tér érzékelése Pozíció mérése További szenzorok Aktuátorok

3
Valós idejű rendszerek

4
Valós idejű rendszer Megbízhatóan válaszol egy eseményre
Műveleteket garantált időn belül elvégez

5
Fogalmak Ciklusidő / válaszidő Jitter (bizonytalanság)
Determinizmus (konzisztens válasz és válaszidő) Determinisztikus feladat (mindig időben kell végezzen) Prioritás
 Determinisztikus feladat (mindig időben kell végezzen) Prioritás.")
6
Hagyományos OS A processzoridő megoszlik a programok között
Háttérfeladatok megszakíthatják a kritikus programokat Vírusírtók Hálózatkezelés... Magas jitter Nem determinisztikus

7
Valós idejű operációs rendszerek
A magas prioritású feladatok lesnek először végrehajtva Magas megbízhatóság Általában nincs UI Példák: NI ETS Wind River VxWorks Valód idejű Linux

8
Programozható eszközök

9
Ember Válaszidő: 1-2 s Magas jitter Konzisztens válasz ? Üzemidő: 8/5
Motiváció → öntanuló, optimalizálás Objektumorientált

10
PC Válaszidő: ~ 100 ms Magas jitter Általában konzisztens válasz
Üzemidő: 24/7, 1-5 éves élettartam „Korlátlan” erőforrások GUI, felhasználói interfész Alacsony ár Nagy méret

11
Ipari PC Válaszidő: ~ 100 ms Üzemidő: 24/7, 5-10 éves élettartam
Környezeti hatásokkal szemben ellenálló „Korlátlan” erőforrások GUI, felhasználói interfész Magas ár

12
Egylapos PC-k Raspberry Pi ? BeagleBone Ipari egylapos PC-k
Windows, Linux, Android, ... Bő erőforrások (< 1 GHz, RAM < 1 GB, Flash < 32 GB) Válaszidő, élettartam ? Kis méret, beágyazható
 Válaszidő, élettartam Kis méret, beágyazható.")
13
Mikrovezérlők 8 bit (pl. 8051) 32 bit (pl. ARM cortex m4)
Korlátozott erőforrások Memória, flash < 128 kB Órajel < 100 MHz Alacsony fogyasztás (pl. 30 mW, 3 µW alvó mód) Válaszidő ~ µs (rendszerfüggő, determinisztikus) Alacsony ár, beágyazható
 Válaszidő ~ µs (rendszerfüggő, determinisztikus) Alacsony ár, beágyazható.")
14
DSP (digitális jelprocesszor)
16-32 bit Jelfeldolgozási feladatokra optimalizálva Lebegőpontos számolás, párhuzamos műveletek 1 órajeles végrehajtása a műveleteknek 400 MHz 2,4 GFLOPS (1 mag) 1,43 W
 1,43 W.")
15
FPGA (field-programmable gate array)
Programozható logikai eszköz ( ezer cella, 1 Mbit memória, < 500 MHz) Párhuzamos végrehajtás Magas megbízhatóság Válaszidő < 100 ns (determinisztikus) VHDL Kisebb rokonok: CPLD, PAL
 Párhuzamos végrehajtás. Magas megbízhatóság. Válaszidő < 100 ns (determinisztikus) VHDL. Kisebb rokonok: CPLD, PAL.")
16
PLC (Programozható logikai vezérlő)
Szabványosított be és kimenetek (ipari) Moduláris felépítés Válaszidő: ms (determinisztikus) Magas megbízhatóság, éves élettartam
 Moduláris felépítés. Válaszidő: ms (determinisztikus) Magas megbízhatóság, éves élettartam.")
17
cRIO Változatos I/O opciók Válaszidő < 1µ, determinisztikus
Jelentős mennyiségű erőforrás (< 1,3 GHz, RAM < 2 GB, Flash < 32 GB, FPGA)
")
18
Mobiltelefon, Tablet Elsősorban mérési eredmények megjelenítése, mérések felügyelete Kevés alkalmazás, sok lehetőség

19
Programozási nyelvek és környezetek

20
Assembly A hardver összes képessége kihasználható
Maximális hatékonyság Magas tudást igényel Hosszú fejlesztési idő Felhasználás: mikrovezérlők optimalizált rutinjai

21
C Általános célú programozási nyelv
A legtöbb eszköz programozható segítségével Alacsony szintű hatékony kód készíthető Eszköztől függő variációk és képességek

22
C# Elsősorban PC program Platformfüggő
Korlátozott eszközhasználat, analíziskönyvtár

23
JAVA PC, beágyazott rendszerek, mobil eszközök Platform független
Korlátozott eszközhasználat, analíziskönyvtár

24
JavaScript, PHP Webes interfészek készítése

25
Matlab Cél: numerikus számítások elvégzése
Vezérlési feladatok (pl. PID szabályozás) Eszközvezérlés
 Eszközvezérlés.")
26
Simulink Adatvezérelt grafikus programozás Modellezés, szimuláció
Valós eszközök vezérlése C kódgenerálás

27
A LabVIEW fejlesztőkörnyezet

28
Példa GUI

29
Példa kód

30
A LabVIEW környezet Fejlesztő: National Instruments Oktatóanyagok

31
Miért LabVIEW? Könnyű megtanulni és használni Gyors fejlesztés
Bárki megtanulhatja, nem szükség programozónak lenni Tudósokra és mérnökökre optimalizálva Vizuális dizájn, egyszerű vizualizáció Gyors fejlesztés Produktivitás növelése Költségek csökkentése

32
Miért pont a LabVIEW? Teljes funkcionalitás
Beépített analízis funkciók Jelanalízis és matematika Számos beépített kommunikációs protokoll Többszálú végrehajtás, eseményvezérlés, objektumok, ... Számos platform programozható egy nyelven keresztül (PC, beágyazott rendszerek, valós idejű rendszerek, FPGA, mikrovezérlők)
")
33
Miért pont a LabVIEW? Ipari szabvány Tipikus felhasználások
Rengeteg kompatibilis hardver Tipikus felhasználások Mérés, adatgyűjtés, adatok elemzése Ipari vezérlés Egyedi rendszerek, prototípusok fejlesztése Komplex tudományos mérőrendszerek vezérlése (Big Physics) Oktatás
 Oktatás.")
34
Hátrányok Nem nyílt szabvány Magas ár
Futtatókörnyezet szükséges a LabVIEW programok végrehajtásához Bonyolultabb kódok esetén: oda kell figyelni a karbantarthatóság érdekében

35
Spagetti VI

36
Példák a LabVIEW alkalmazására

37
Elektronika Tesztelés Teljesítményelektronikák vezérlése
Félvezetők működése Audió áramkörök tesztelése Videó Rádiófrekvenciás áramkörök Vezetéknélküli kommunikáció Teljesítményelektronikák vezérlése

38
Járműipar Gyors prototípusfejlesztés Hardware-in-the-Loop
Vezérlőelektronikák fejlesztése Tesztelés Végső termék tesztelése Valós idejű mérések

39
Hadi és repülőgépipar Repülés Katonai kommunikáció Radar Űrprogramok
Automatizált tesztrendszerek

40
SpaceX

41
További területek Olajipar Fényelemek, szélerőművek Egészség Tudomány
Műszerek tesztelése Tudomány

42
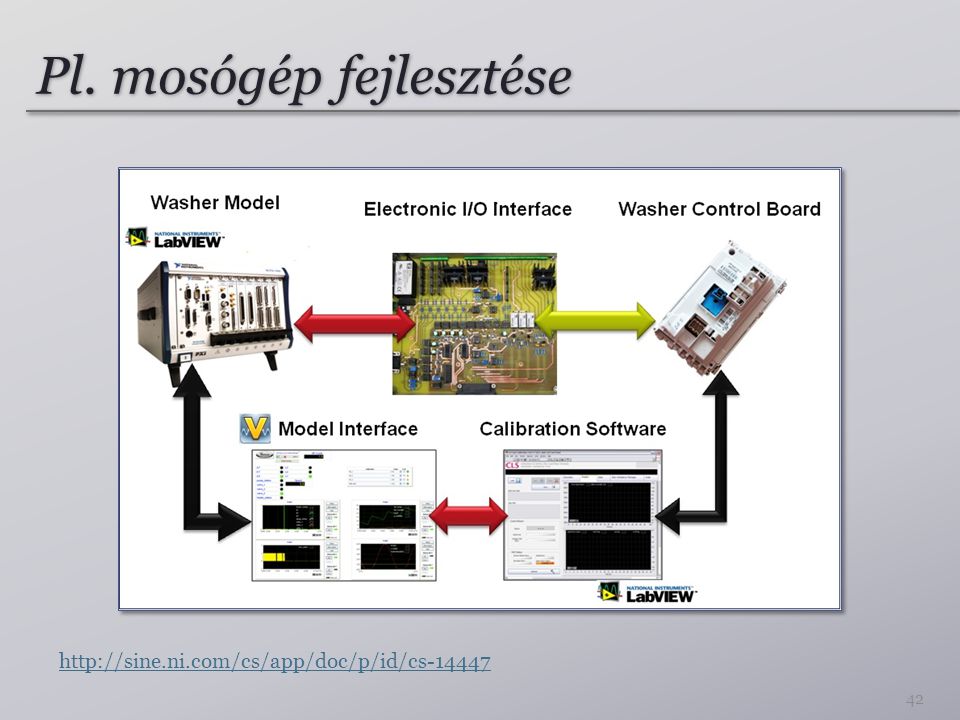
Pl. mosógép fejlesztése
43
Big Physics - CERN Nem megfelelő irányú részecskék elfogása
120 valós idejű PXI rendszer

44
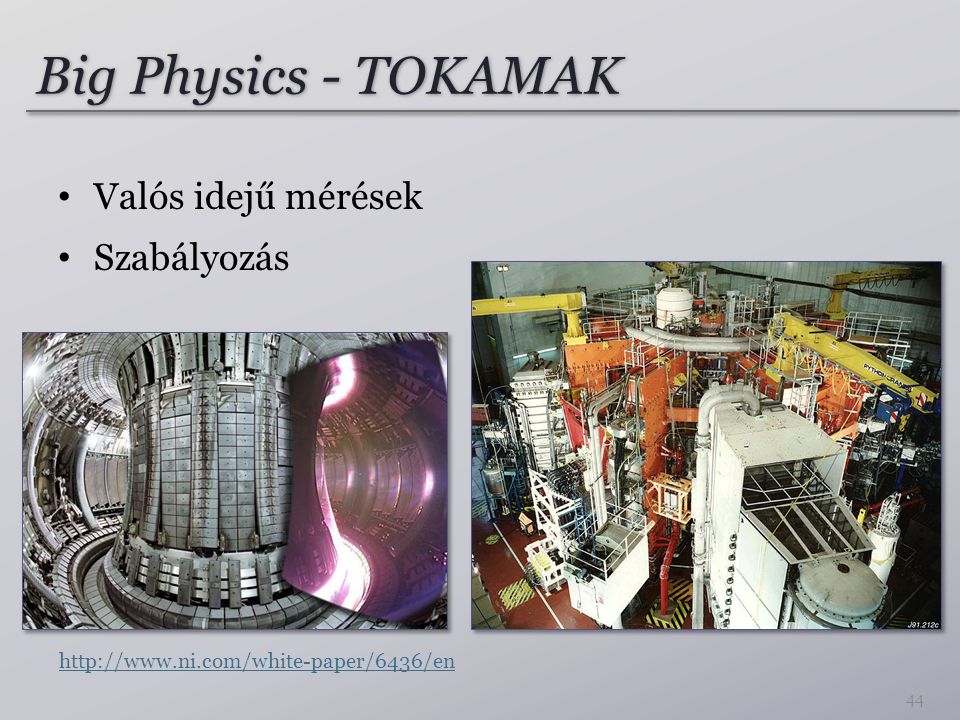
Big Physics - TOKAMAK Valós idejű mérések Szabályozás
45
Lego

46
A LabVIEW programozás alapjai

47
Kezdőablak

48
Virtual Instrument – VI

49
Projektek

50
Eszköztárak

51
Controls palette Előlapi elemek Numeric input / output
Boolean: nyomógomb, LED String bemenet/ kimenet Grafikonok …

52
Functions palette Block diagram elemei Programozási struktúrák
Tömbműveletek Numerikus operátorok Boolean, String Összehasonlítás…

53
Context help A kurzor alatt lévő elem rövid sugúja Aktiválás: CTRL+H

54
Tools palette Alapbeállítás: automatic tool selection (ajánlott)
Leggyakrabban használt: Manipulate Select and edit Modify text Create wire

55
Adattípusok Numeric: Boolean String and fájl útvonal Referencia
Egész, lebegőpontos, komplex, fixpontos Boolean String and fájl útvonal Referencia Objektumok Tömbök Clusterek (struktúrák)
")
56
Numerikus adattípusok

57
Numerikus típus megváltoztatása

58
Numerikus paletta

59
További funkciók: Mathematics

60
While Loop int i = 0; int stop = 0; do { // Some code i++;
} while (!stop);
;")
61
For Loop int i; int N = count; for (i = 0; i < N; i++) {
// Some Code }

62
While Loop int i; int N = count; int stop = 0; for (i = 0 ; i < N; i++) { //Some code if (stop) { break; }
 { //Some code if (stop) { break; }")
63
Previous iteration: Feedback node
int i; int N = count; int x = 0; for (ind i = 0; i < N; i++) { x = x + i; }
 { x = x + i; }")
64
Similar option: Shift register
int i; int N = count; int x = 0; for (ind i = 0; i < N; i++) { x = x + i; }
 { x = x + i; }")
65
Adatvezérelt programozás
Párhuzamos végrehajtás Egy csomópont akkor hajtódik végre, amikor az összes bemenet a rendelkezésre áll A csomópont akkor adja vissza a végeredményt, amikor befejezte a futást A végrehajtást az adatok vezetékeken történő áramlása határozza meg

66
Adatvezérelt programozás: példa

67
Sekvencia

68
LabVIEW toolkit-ek

69
Programozási lehetőségek

70
MathScript RT Module MATLAB kódok futtatása 700 beépített funkció GUI
Valós idejű rendszerek

71
Control Design and Simulation Module
Simulink jellegű programozás

72
Application Builder for Windows
Önálló* programok készítése Telepítőfájlok készítese .net dll-ek Forráskód elrejtése *: futtatókörnyezetet fel kell telepíteni

73
Robotics Module Valódi hardverek vezérlése 3D szimulációs környezet

74
LEGO MINDSTORMS NXT Module
Lego NXT programozása LabVIEW használatával

75
Vision Development Module
3D algoritmusok Valós idejű felismerés

76
PID and Fuzzy Logic Toolkit
P, PI, PD, and PID szabályozások Fuzzy szabályozások Automatikus hangolás (online/offline)
")
77
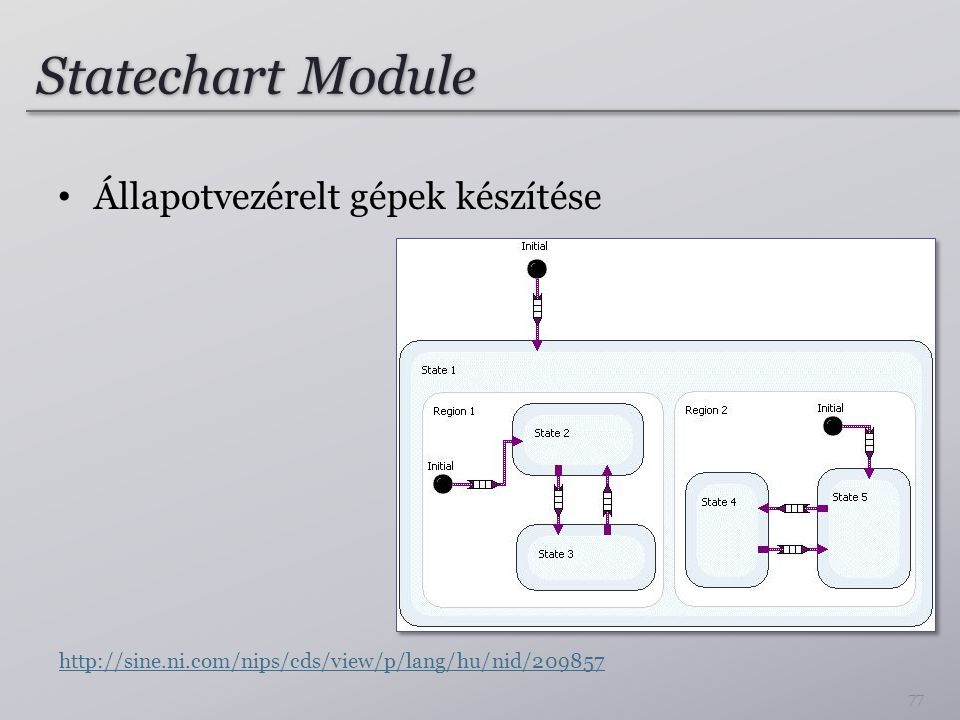
Statechart Module Állapotvezérelt gépek készítése
78
Real-Time Module Valós idejű rendszerek vezérlése
Önálló műszerek, vezérlők pl. cRIO, PXI, ... Real-Time Execution Trace Toolkit Debugging Profiling

79
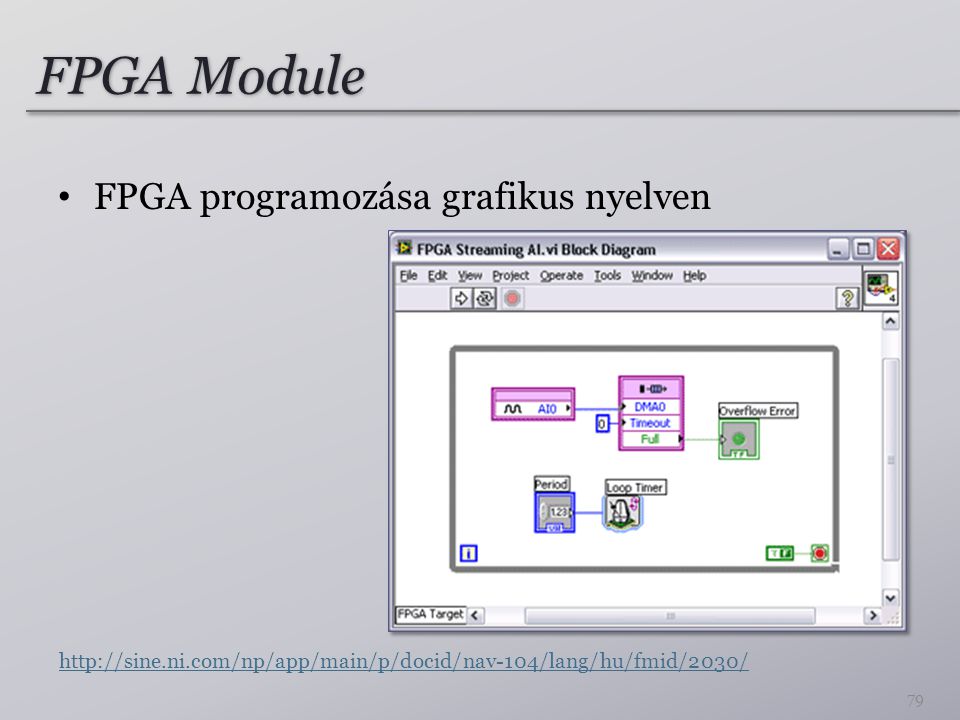
FPGA Module FPGA programozása grafikus nyelven
80
Touch Panel Module HMI panelek programozása
81
Datalogging and Supervisory Control Module
OPC szerver/kliens HMI NI hardver PLC ...

82
Adaptive Filter Toolkit
Különböző adaptív szűrő algoritmusok Szimuláció FPGA kód

83
Szenzorok

84
Digitális mérőműszer

85
A szenzorok működése Energia-átalakítás történik Energiafajták:
Sugárzási energia, mechanikai energia, hőenergia, villamos energia, mágneses energia, kémiai energia

86
Szenzorok jellemzése Bemeneti fizikai mennyiség
pl. hőmérséklet, elmozdulás, mágneses térerősség... Kimenő fizikai mennyiség (általában elektromos mennyiség) pl. feszültség, áramerősség, ellenállás... Karakterisztika: a kimenet függése a bemeneti mennyiségtől lineáris / nem lineáris Érzékenység pl. 3 mV/°C
 pl. feszültség, áramerősség, ellenállás... Karakterisztika: a kimenet függése a bemeneti mennyiségtől. lineáris / nem lineáris. Érzékenység. pl. 3 mV/°C.")
87
Szenzorok jellemzése Működési elv
Aktív pl: termóelem, pH-mérő, fényelem Passzív működéséhez segédenergiára van szükség pl: termisztor, fotóellenállás, Hall-szonda Kialakítás Elérhetőség

88
Szenzorok tulajdonságai
Mérési tartomány Zajhatár: ennél kisebb jelek változása már elvész a zajban Túlterhelési tartomány Felbontóképesség Nullpont-hiba Érzékenység hiba Hiszterézis Linearitás-hiba / alakhiba

89
Szenzorok tulajdonságai
Drift (kúszás) Hőmérsékletfüggés Környezeti hatásokra való érzékenység pl. rezgések, nyomás, nedvesség... Beállási idő Sávszélesség, frekvencia-karakterisztika Követett szabványok pl. IEEE 1451, TEDS Kalibrálás szükségessége
 Hőmérsékletfüggés. Környezeti hatásokra való érzékenység pl. rezgések, nyomás, nedvesség... Beállási idő. Sávszélesség, frekvencia-karakterisztika. Követett szabványok pl. IEEE 1451, TEDS. Kalibrálás szükségessége.")
90
Hőmérséklet mérése

91
Hőmérséklet mérése A legtöbb folyamat, fizikai, kémiai... tulajdonság hőmérsékletfüggő pl. sűrűség, ellenállás, reakciósebesség... Az egyik leggyakrabban mért paraméter

92
Mérés elve Hőmérsékletváltozás hatására változás áll be a szenzorban
vezetőképesség megváltozása thermoelektromos effektusok hőtágulás hallmazállapot-változás kémiai reakció (egyensúly eltolódás)
")
93
Megfelelő hőkontaktus
Hőátadás közvetlen érintkezés Hővezetés valamilyen közeg viszi át a hőenergiát Hősugárzás elektromágneses sugárzás útján

94
Bimetál kapcsoló Két állapot Hiszterézis

95
Ellenállás-hőmérők RTD

96
Fémek ellenállása Fémek ellenállása hőmérsékletfüggő
Ok: ionok hőmozgása T nő → R nő

97
PT 100 Platina PT100 szenzorok: 0 °C: 100 Ω
Mérési tartomány: -260 °C °C

98
Ellenállás hőmérők Nagy pontosság Alacsony drift
Széles mérési tartomány Reagálási: idő néhány másodperc Típikus méret > 3 mm Ár > 2000 Ft

99
Ellenállás hőmérők mérése
Feladat: nagy pontossággal és felbontással (24 bit) mérni az ellenállás változást
 mérni az ellenállás változást.")
100
Ellenállás hőmérők bekötése

101
Termisztor NTC

102
Ellenállás hőmérsékletfüggése
Hőmérséklet növekedése → töltéshordozók számának növekedése → ellenállás csökkenése Általános képlet: 𝑅 𝑇 = 𝑅 𝑟𝑒𝑓 ∙ 𝑒 𝐴+ 𝐵 𝑇 + 𝐶 𝑇 2 + 𝐷 𝑇 3 Közelítés: 𝑅 𝑇 = 𝑅 25 ∙ 𝑒 𝐵 25/85 𝑇 − 𝐵 25/85 𝑇 25

103
Termisztor 𝑇= 1 1 𝑇 25 + 1 𝐵 25/85 ∙ln 𝑅 𝑇 𝑅 25 V0
𝑅 𝑇 = 𝑅 0 ∙ 𝑉 𝑇 / 𝑉 0 1− 𝑉 𝑇 / 𝑉 0 R0 VT A/D Rt 𝑇 25 = K 𝐵 25/85 =3977 K 𝑅 0 = 𝑅 25 =10 kΩ MicLab – 09 – Mingesz Róbert

104
Termisztor Mérési tartomány: -90 °C ..130 °C Reakcióidő: néhány s
Átmérő > 1,5 mm Ár > 100 Ft

105
Önfűtés Mérőáram: hőt termel: 𝑃=𝑈∙𝐼
Newton lehűlési törvény: 𝑃 𝑇 =𝐾( 𝑇 𝑅 − 𝑇 𝐾 ) Egyensúlyi állapot: 𝑇 𝐾 = 𝑇 𝑅 − 𝑈 2 𝐾∙ 𝑅 𝑇
 Egyensúlyi állapot: 𝑇 𝐾 = 𝑇 𝑅 − 𝑈 2 𝐾∙ 𝑅 𝑇.")
106
PTC eszközök T nő → R nő Alkalmazások:
Áram korlátozása (regenerálódó biztosíték) Hőmérsékletszabályozás
 Hőmérsékletszabályozás.")
107
Thermoelem

108
Termoelem Seebeck-effektus: Termoelem (Réz-Konstantán vezetékek)
")
109
Termoelem Kis impedancia, kis feszültség: nagy erősítés szükséges
Jó közelítéssel lineáris Átmérő > 1.5 mm Ár > 2000 Ft Mérési tartomány K típusú termoelem esetén: -200 °C °C

110
Termoelem - hidegpont Hidegpont kompenzálás

111
NI-9211 hidegpont-kompenzálás
Termisztor

112
Integrált hőmérsékletszenzorok

113
IC hőmérsékletszenzorok
LM35 Lineáris kimenet +2 °C °C

114
IC hőmérsékletszenzorok
AD7414 Digitális kimenet 10 bit -40 °C °C

115
IC hőmérsékletszenzorok
LM75 Digitális kimenet 9 bit -55 °C °C

116
Pirométerek Hőmérséklet → hősugárzás (általában infravörös)
A sugárzás spektruma hőmérsékletfüggő → a hőmérséklet meghatározható Kontaktus nélküli mérés Mérési tartomány: -32 °C °C

117
Fény detektálása

118
Fény érzékelése Fény → hőmérsékletváltozás elektronok gerjesztése
elektronok kilépése

119
Bolométer Hőhatás mérése (infravörös fény detektálása)
")
120
Fotóellenállás (light dependent resistor)
Félvezető Fény → elektronok kerülnek át a vezetési sávba Hátrányok: lassú Előnyök: egyszerű alkalmazhatóság, ohmikus Spektrális érzékenység: típustól függ

121
Fotodióda Előnyök: gyors az áram arányos a fényintenzitással olcsó Érzékenység: szükség szerint optikai szűrővel módosítható

122
Fotodióda

123
Fotodióda

124
Fotótranzisztor Tranzisztor vezérlése: fény (bázisáram helyett)
Nagyobb érzékenység/áram

125
CCD

126
Hőkamera

127
Ionizáló sugárzások érzékelése
Működési elv: Elektronok gerjesztése (vezetés, fényhatás) Ionizáció Szcintillátor Geiger-Müller számláló
 Ionizáció. Szcintillátor. Geiger-Müller számláló.")
128
Pulzoximéter Pulzusszám Oxigén szaturáció

129
Mágneses tér érzékelése

130
Mágneses terek érzékelése
Váltakozó mágneses terek → mágneses indukció Állandó mágneses terek → Hall-effektus, …

131
Hall-effektus Félvezetők esetén a töltéshordozók mind + mind – előjelűek lehetnek

132
További mágneses érzékelők
Reed-relé SQUID: gyenge terek érzékelése

133
Kémhatás mérése Nehézségek: nagy belső ellenállás, alacsony feszültség

134
Páratartalom mérése

135
Gázok érzékelése – Taguchi szenzorok
Ellenállás változás Szenzorok zajának változása

136
Oxigén koncentráció érzékelése – Lambda-szonda

137
Pozíció érzékelése

138
Mikro kapcsolók Felhasználás: pl. végállások detektálása

139
Fotókapu Felhasználás: pl. áthaladás érzékelése
IR fény: a látható fény nem zavarja a szenzor működését Zavarérzéketlenség növelése: moduláció

140
Fényfüggőny Biztonsági felhasználás

141
Reflexiós fotókapu Felhasználás: pl. közelség érzékelése

142
Potenciométer Potenciométer 𝑈= 𝑈 𝑟𝑒𝑓 ∙ 𝑙 𝐿

143
Potenciométer

144
Pozíció kódolók

145
Mágneses elfordulás szenzor

146
Kapacitív elmozdulásmérők
Mérési elv: elmozdulás → kapacitás változása

147
Induktív elmozdulásmérők
Mérési elv: elmozdulás → induktivitás/csatolás/veszteség változása

148
LVDT (Linear variable differential transformer)
")
149
Folyadékszint detektálása

150
Nyúlásmérő bélyegek (strain gauge)
Mérési elv: elmozdulás → ellenállásváltozás

151
Erő mérése (load cell) Mérési elv: erő → elmozdulás
 Mérési elv: erő → elmozdulás")
152
Erő mérése

153
Nyomás mérése Mérési elv: nyomáskülönbség → érzékelőfelület torzulása

154
Gyorsulás érzékelése Mérési elv: tehetetlen tömeg elmozdulása

155
Integrated circuit piezoelectric sensor
Rezgések érzékelése

156
Fordulatszám mérése

157
Szögsebesség mérése: Giroszkópok

158
Áramlás mérése Lapát Rotor/légcsavar

159
Áramlás mérése Venturi-féle áramlásmérő (nyomáskülönbség)
Örvények mérése (vortex)
")
160
Áramlás mérése Hővezetés Pitó-cső

161
Aktuátorok

162
Aktuátorok

163
LED Meghajtás: Feszültségforrás + áramkorlátozó ellenállás
Áramgenerátor

164
Lézer dióda

165
Peltier elem Mozgó alkatrész nélküli hűtés/fűtés
Az átvitt hő az árammal arányos

166
Elektromágnes

167
Hangszórók

168
Motorok

169
Léptető motorok Cél: kis méretű elmozdulások

170
Léptető motorok

171
Piezo kristályok Piezó-effektus: mechanikai deformáció ↔ feszültség
Alkalmazás: mikrofon/hangszóró (hallható/ultrahang) Mikrószkopikus elmozdulások mérése/létrehozása Órajelek létrehozása (kvarc)
 Mikrószkopikus elmozdulások mérése/létrehozása. Órajelek létrehozása (kvarc)")
172
Köszönöm a figyelmet ... vége ...







 7) 8) 9) 10) Mennyi az x, y és z értéke? 11) 12) 13) 14) 15)>")













