Előadást letölteni
2
BIOMECHANIKA

3
BIOMECHANIKA TANSZÉK Tanszékvezető: Kiszolgáló épület III. em.
Dr. Tihanyi József, egyetemi tanár, MTA doktor Kiszolgáló épület III. em. Oktatók: Dr. Bretz Károly nyugalmazott tudományos tanácsadó, MTA doktor Dr. Barabás Anikó egyetemi docens, PhD (biológia) Dr. Laczkó József egyetemi docens, PhD (matematika) Dr. Csende Zsolt, egyetemi adjunktus, PhD (biológia) Szilágyi Tibor tudományos munkatárs Dr. Rácz Levente tudományos munkatárs Tudományos assziszens: Gréger Zsolt Előadó: Berki Bernadett
 Dr. Laczkó József egyetemi docens, PhD (matematika) Dr. Csende Zsolt, egyetemi adjunktus, PhD (biológia) Szilágyi Tibor tudományos munkatárs. Dr. Rácz Levente tudományos munkatárs. Tudományos assziszens: Gréger Zsolt. Előadó: Berki Bernadett.")
5
Vizsga: írásbeli teszt és számítás
KÖVETELMÉNYEK Jelenlét az előadásokon Jelenlét a laboratóriumi foglalkozásokon (a hiányzást pótolni kell) Sikeres zárthelyi Sikeres házi feladat megoldás Zárthelyi dolgozat: 1. nyolcadik hét 2. tízen harmadik hét Vizsga: írásbeli teszt és számítás Házi feladat: 1. tömegközéppont meghatározás
 Sikeres zárthelyi. Sikeres házi feladat megoldás. Zárthelyi dolgozat: 1. nyolcadik hét. 2. tízen harmadik hét. Vizsga: írásbeli teszt és számítás. Házi feladat: 1. tömegközéppont meghatározás.")
6
FELKÉSZÜLÉS A VIZSGÁRA
Tankönyv: Barton J.: Biomechanikai alapismeretek. Tankönyviadó Előadások anyaga Laboratóriumi foglalkozásokon tanultak

7
BIOMECHANIKA ? A kineziológia egyik tudományága, amely az elő (bio) rendszerek mechanikai viselkedését vizsgálja, illetve a mechanikai törvényszerűségek érvényesülését vizsgálja az élő szervezeteken azok tér és időbeli mozgásai során.
 rendszerek mechanikai viselkedését vizsgálja, illetve a mechanikai törvényszerűségek érvényesülését vizsgálja az élő szervezeteken azok tér és időbeli mozgásai során.")
8
KINEZIOLÓGIA ? Az emberi mozgások során érvényesülő anatómiai, élettani, biomechanikai, neurofiziológiai, mozgásszabályozási és pszichofiziológiai törvényszerűségek érvényesülésének vizsgálata Mozgástan, vagy mozgástudomány Az elő (bio) rendszerek mozgását vizsgáló tudomány
 rendszerek mozgását vizsgáló tudomány.")
9
Normáltól eltérő mozgások Minden napos tevékenység
Mechanika Biológiai anyag Emberi test BIOMECHANIKA Alap, normál mozgások Normáltól eltérő mozgások Célorientált mozgások Sport Foglalkozás Minden napos tevékenység Levegőben Talajon Vízben

10
Emberi test Aktív és passzív mozgatórendszer
Keringési és légzőrendszer rendszer A szövetek biomechanikája Az izületek biomechanikája Szív Ér, Folyadék Tüdő, Levegő, Folyadék Izom, ideg, ín, szalag, porc, csont Láb, boka, térd, csípő, stb.

11
Tér, idő, sebesség, gyorsulás Munka, energia, teljesítmény
MECHANIKA S(Z)TATIKA DINAMIKA Kinetika Kinetika Kinematika Erő Erő Tér, idő, sebesség, gyorsulás Munka, energia, teljesítmény
TATIKA. DINAMIKA. Kinetika. Kinetika. Kinematika. Erő. Erő. Tér, idő, sebesség, gyorsulás. Munka, energia, teljesítmény.")
12
Időbeli lefolyás szerint Nem egyenletesen változó
MECHANIKAI MOZGÁSOK PONT KITEJEDT TEST HALADÓ FORGÓ Pálya szerint Időbeli lefolyás szerint Egyenes vonalú Görbe vonalú Egyenletes Nem egyenletes Változó Nem változó Egyenletesen változó Nem egyenletesen változó

13
Matematikai modellezés, szimuláció
BIOMECHANIKA Matematikai modellezés, szimuláció Mérések, számítások Mozgásszabályozás Optimalizáció

14
A biomechanika, mint tudományág kialakulása és előzményei

15
Arisztotelész (i.e. 384-322) Az állatok részei Az állatok mozgása
Az állatok úgy tudnak mozogni, hogy nyomást gyakorolnak arra, ami alattuk van (vagyis a talajra). Az atléták távolabbra tudnak ugrani, ha súlyt tartanak a kezükben, és gyorsabban tudnak futni, ha karjaikat erőteljesen lendítik. Az állatok részei Az állatok mozgása Az állatok fejlődése
. Az atléták távolabbra tudnak ugrani, ha súlyt tartanak a kezükben, és gyorsabban tudnak futni, ha karjaikat erőteljesen lendítik. Az állatok részei. Az állatok mozgása. Az állatok fejlődése.")
16
Az izmok szerepe a járás és más mozgások során.
Pontos leírása annak, hogyan történik az izületekben létrejövő forgómozgások átalakítása transzlációs mozgássá. Az emelőrendszerekről, a gravitációról, a mozgás törvényszerűségeiről megfogalmazott koncepciói meglehetősen pontosak voltak és a későbbi tudósok (Leonardo da Vinci, Newton, Borelli stb.) felfedezéseinek tudományos előzményeinek tekinthetők.
 felfedezéseinek tudományos előzményeinek tekinthetők.")
17
Egyszerű munkagépek (csiga)
Arkhimédész (i.e ) A súlypont meghatározása Euréka, Euréka Adjatok egy helyet (stabil pontot), amelyen állni tudok és akkor megtudom mozgatni a Földet (kimozdítom sarkaiból a világot)! Egyszerű munkagépek (csiga)
 A súlypont meghatározása. Euréka, Euréka. Adjatok egy helyet (stabil pontot), amelyen állni tudok és akkor megtudom mozgatni a Földet (kimozdítom sarkaiból a világot)! Egyszerű munkagépek (csiga)")
18
Agonista- antagonista izomcsoportok
Galen ( ) Agonista- antagonista izomcsoportok Az erek funkciója Harvey ( ) Gladiátorok orvosa
 Agonista- antagonista izomcsoportok. Az erek funkciója. Harvey ( ) Gladiátorok orvosa.")
19
Leonardo da Vinci (1452-1519) Anatómus, biológus, mérnök, művész
Testközéppont és egyensúly A madarak repülése

20
Luigi Galvani (1737-1798) Albrecht Haller (1708-1777)
Az izmok ingerelhetősége Albrecht Haller ( ) A kontrakció az izmok alapvető működési formája Amand Duchenne ( ) Physiologie des Mouvements Az izmok együttműködése
 A kontrakció az izmok alapvető működési formája. Amand Duchenne ( ) Physiologie des Mouvements. Az izmok együttműködése.")
21
Adolf E. Fick (1829-1901) Wilhelm Roux (1850-1924)
Izometriás és izotóniás kontrakció Wilhelm Roux ( ) Edzés - izomhipertrófia
 Edzés - izomhipertrófia.")
22
Mosso (1829-1901) Einthoven (1843-1910)
Technikai újítások Mosso ( ) Ergométer Einthoven ( ) Galvanométer, elektromiográfia
 Ergométer. Einthoven ( ) Galvanométer, elektromiográfia.")
23
Izomműködés A.V. Hill ( ) Erő-sebesség összefüggés
 Erő-sebesség összefüggés")
24
Galileo Galilei (1564-1642) Isaac Newton (1642-1727)
Mozgások mechanikai elemzése Galileo Galilei ( ) Nehézségi gyorsulás Isaac Newton ( ) A mozgás három törvénye
 Nehézségi gyorsulás. Isaac Newton ( ) A mozgás három törvénye.")
25
Giovanni Alfonso Borelli (1608-1679)
A modern biomechanika atyja A matematika, a fizika és az anatómia összekapcsolása Az első tudós, aki kinyilvánította, hogy az emberi izomrendszer mechanikai törvények szerint működik Az állatok mozgása nem csak a belső erőktől, de a víz és a levegő ellenállásától is függ. Az izmok reciprok működése Az izmok nem kontrahálódnak, csak a térfogatukat növelik

26
Étienne Jules Marey (1830-1904) Eadweard Muybrigde (1831-1904)
Fényképezőgép kifejlesztése mozgások elemzésére (Chrono-Zyklo-Photographia) Eadweard Muybrigde ( ) Sorozatfelvételek Lumiere fivérek kifejlesztették a filmkamerát (1894)
 Eadweard Muybrigde ( ) Sorozatfelvételek. Lumiere fivérek kifejlesztették a filmkamerát (1894)")
28
Christian Wilhelm Braune (1831-1892)
Otto Fisher ( ) Járáselemzés Módszer a testközéppont kiszámítására A részsúlypontok helyének meghatározása
 Járáselemzés. Módszer a testközéppont kiszámítására. A részsúlypontok helyének meghatározása.")
29
Az idegi központok nem tudnak semmit az izmokról, a mozgást ismerik
Jackson ( ) Az idegi központok nem tudnak semmit az izmokról, a mozgást ismerik
 Az idegi központok nem tudnak semmit az izmokról, a mozgást ismerik.")
30
Charles Sherrington (1857-1952)
Az izmok reciprok beidegzése Henry Bowditch ( ) Minden vagy semmi törvénye
 Minden vagy semmi törvénye.")
31
?

32
Transzverzális v. vízszintes
Az emberi test síkjai Koronális v. frontális Transzverzális v. vízszintes Szagittális v. oldal

33
Kardinális síkok és tengelyek
Helyi referencia rendszer

34
kifelé – befelé forgatás Lateromedial v. szélességi
KARDINÁLIS SÍKOK TENGELYEK Mozgás FRONTÁLIS Közelítés - távolítás OLDAL feszítés - hajlítás TRANSZVERZÁLIS kifelé – befelé forgatás Hosszúsági Jobbra -balra Anteroposterior v. mélységi jobbra -balra Lateromedial v. szélességi Előre - hátra

35
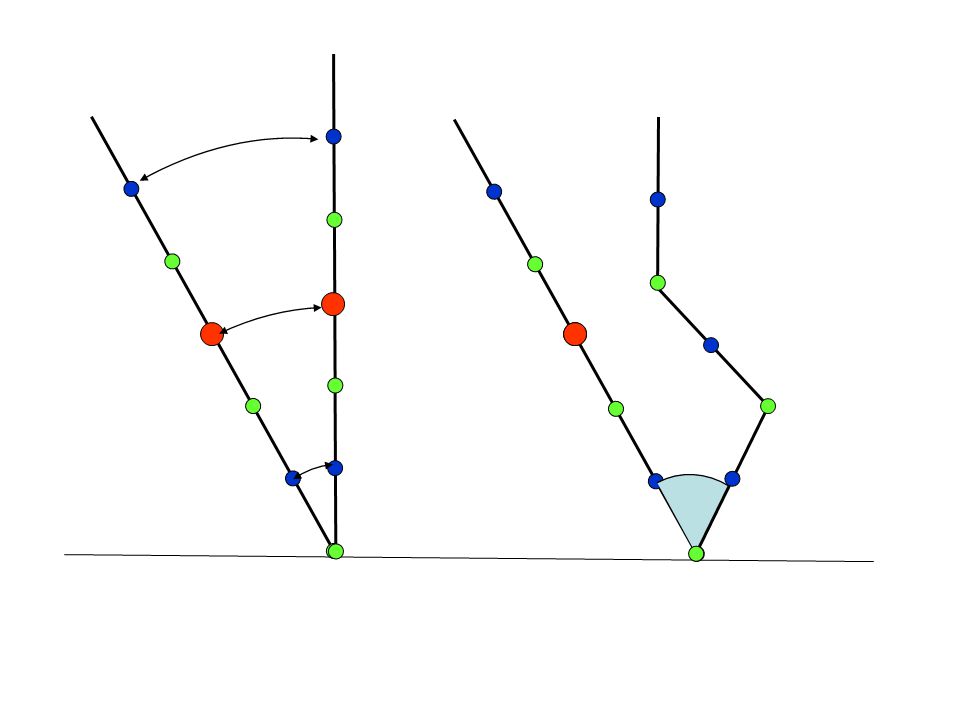
FORGÁS A HOSSZÚSÁGI TENGELY KÖRÜL

36
FORGÁS A MÉLYSÉGI TENGELY KÖRÜL

37
FORGÁS A SZÉLESSÉGI TENGELY KÖRÜL

38
Izületi szög Kiegészítő (belső) 100° Kiegészítő (belső) 180°
Anatómiai (külső) 80° Anatómiai (külső) 0°
 80° Anatómiai (külső) 0°")
39
IZÜLETI SZÖGELFORDULÁS

40
Kettő vagy több csont összeköttetése inak, szalagok és izmok által
Izület Kettő vagy több csont összeköttetése inak, szalagok és izmok által 148 Mozgatható csont 147 izület

41
Az izületek mozgási szabadságfoka
Szabadságfok: a változóknak azt a számát jelenti, amellyel a mozgás leírható. A szabadságfok száma = a koordináták száma mínusz a a mozgás korlátozottság száma. Transzlációs Forgási 3 + 3 6

42
Izületi mozgás szabadságfok (SZF)
3D: SZF = 6N - K 2D SZF = 3N - K N = testszegmensek száma, K = a korlátozottság szám

43
Korlátozottság ANATÓMIAI független
függő (az egyes izületi mozgások egymásra hatása) AKTUÁLIS (Pl. kerékpár pedálozás) MECHANIKAI (pl. egyensúlyozás, véletlen megcsúszás) MOTOROS FELADAT (meghatározott mozgás)
 AKTUÁLIS (Pl. kerékpár pedálozás) MECHANIKAI (pl. egyensúlyozás, véletlen megcsúszás) MOTOROS FELADAT (meghatározott mozgás)")
44
Kinematikai lánc mobilitása
Szabadságfok több, mint egy csuklóból álló izületi rendszerben Kinematikai lánc mobilitása M = 6n - å I • ki 5 I=3 M = a test mobilitása, I = izületi osztály, ki = az adott izületi osztályt képviselő izületek i = 6 -f, f= egy izület szabadságfoka

45
F = (6•148) - [(3 •29) + (4 •33) + (5 •85)] = 244
Harmad osztályú izület: 29 (három szabadságfok) Negyed osztályú izület: 33 (két szabadságfok) Ötöd osztályú izület: 85 (egy szabadságfok) F = (6•148) - [(3 •29) + (4 •33) + (5 •85)] = 244
![F = (6•148) - [(3 •29) + (4 •33) + (5 •85)] = 244](http://slideplayer.hu/slide/1926469/7/images/45/F+%3D+%286%E2%80%A2148%29+-+%5B%283+%E2%80%A229%29+%2B+%284+%E2%80%A233%29+%2B+%285+%E2%80%A285%29%5D+%3D+244.jpg "Harmad osztályú izület: 29 (három szabadságfok) Negyed osztályú izület: 33 (két szabadságfok) Ötöd osztályú izület: 85 (egy szabadságfok) F = (6•148) - [(3 •29) + (4 •33) + (5 •85)] = 244.")
47
TÖMEGKÖZÉPPONT

48
TÖMEGKÖZÉPPONT

49
G1 G2 G3

52
Számítási módszerek a tömegközéppont helyének meghatározására
Palló és mérleg módszer M = 0 G + Fr = 0 G ltkp + Fr lp= 0 Fr lp G

53
Palló és mérleg módszer
G + Fr = 0 G ltkp + Fr lp= 0

54
Palló és mérleg módszer
G + Fr = 0 G ltkp + Fr lp= 0

55
Szegmentális módszer

56
A résztömegközéppontok helye a testszegmenseken
Demster modell 13 szegmens

57
m = térfogat (V) sűrűség ()
Térfogat és tömeg Vsz = (m2 –m1) r2 – (s2 – s1) R2 m = térfogat (V) sűrűség () Az izom sűrűsége 1,028 g cm-3
 r2 – (s2 – s1) R2. m = térfogat (V) sűrűség () Az izom sűrűsége 1,028 g cm-3.")
58
Mágneses rezonancia (MRI)
")
59
A testszegmens térfogatának kiszámítása ( V )
Vs = [ (As1 + As2) / 2] ls Vs – a szelet térfogata As1 – a szelet területe ls – a szelet vastagsága ls Vi = Vs A1 A2
 / 2] ls. Vs – a szelet térfogata. As1 – a szelet területe. ls – a szelet vastagsága. ls. Vi = Vs. A1. A2.")
60
Hanavan testmodel 15 szegmens

61
17 szegmens

62
A testszegmensek százalékos tömege a testtömeghez viszonyítva
Demster Clauser Plagenhoef Fej 7.9 7.3 8.2 Törzs 48.6 50.7 55.1 Felkar 2.7 2.6 3.2 Alkar 1.6 2.3 1.9 Kéz 0.6 0.7 0.65 Comb 9.7 10.3 10.5 Lábszár 4.5 4.3 4.7 Láb 1.4 1.5

63
Markerek elhelyezése

64
P1 (P1 – P2) 0.45 P2 (P2 – P5) 0.61 P3 (P3 – P4) 0.43 (P4 – P6) 0.43 P4 (P5 – P7) 0.43 P5 (P7 – P8) 0.43 P6 P7 P8
 P6. P7. P8.")
65
x1 x2 x3 x4 x5 x6 x7 y1 y2 y3 y4 y5 y6 y7

66
Fej 7.9 Törzs 48.6 Felkar 2.7 Alkar 1.6 Kéz 0.6 Comb 9.7 Lábszár 4.5
Demster Fej 7.9 Törzs 48.6 Felkar 2.7 Alkar 1.6 Kéz 0.6 Comb 9.7 Lábszár 4.5 Láb 1.4 m 0.079 m 0.486 m 0.027 m 0.016 m 0.06 m 0.09 m 0.045 m 0.014

67
m1x1 x1 m1 m1y1 y1

68
A test tömegközéppontjának x, y, z koordinátáinak kiszámítása