Előadást letölteni
Az előadás letöltése folymat van. Kérjük, várjon

1
Molnár Máté WOBHME Intelligens Termékek Elemei 2014/15/I. iRobot – Roomba bemutatása

2
Takarítás szempontjából alapvetően 3 féle embert különböztetünk meg: Aki csak akkor takarít, ha jönnek a rég nem látott rokonok. Aki hetente egyszer, egy adott napon takarít. Aki mindig takarít… iRobot Roomba

3
A cég rövid bemutatása: Alapítva: 1990 Székhely: Bedford, Massachusetts, USA Alapvetően házimunkákat segítő robotok tervezésére és gyártására szakosodott vállalat, mely alapítása után hamar belépett a katonai célú robotok piacára is, jelenleg pedig elkezdett foglalkozni az orvoslásban alkalmazott robotokkal. - több mint 9 millió USD éves profit - közel 500 alkalmazott - több mint 14 millió eladott termék

4
Roomba Porszívó robot – „szinten tartásra” Az első verzió 2002-ben került piacra Jelenleg a 6. széria legújabb A vállalat legsikeresebb terméke 2014 februárjában elkelt a 10 milliomodik termék Egyszerű megoldások elérhető ár (80 000 – 180 000 HUF)
.")
5
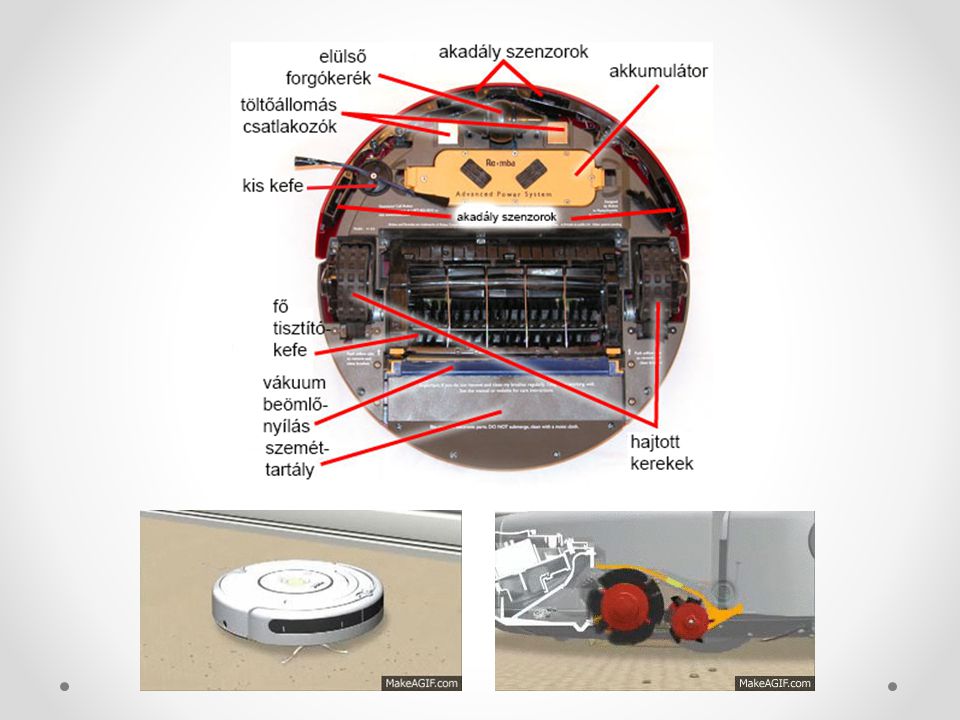
Hogyan működik?

7
Fontosabb tartozékok Virtuális falDokkoló

8
Szenzorok I. -Adott helység méreteinek becslése -Kommunikáció a virtuális fallal és a dokkolóval

9
Szenzorok II. Horizontális akadályokVertikális akadályok

10
Működés folyamatai szenzorok információi mikroprocesszor hajtott kerekek adott, ellőre megválasztott időpontban bekapcsol kiáll a dokkolóból a felső infravörös szenzorral megbecsüli az adott helység méreteit némi ráhagyással egy takarítási időt határoz meg a szobában takarít (bővebben később) - ha használunk virtuális falat, akkor a takarításra szánt idő után már nem veszi figyelembe ha érzékelte hogy átmegy rajta akkor újra figyelembe veszi újabb takarítási időt határoz meg az új helységre - ha kezd lemerülni az akkumulátora, ismét nem veszi figyelembe a virtuális falakat, keresi a dokkoló jelét, miközben takarít nagyobb szögekben fordul el ha észleli a dokkoló jelét akkor odamegy hozzá és szemből beáll feltölt - ha nem végzett a teljes területtel a virtuális falakon keresztül megkeresi a félbehagyott részt újrakezdi a folyamatot
 - ha használunk virtuális falat, akkor a takarításra szánt idő után már nem veszi figyelembe ha érzékelte hogy átmegy rajta akkor újra figyelembe veszi újabb takarítási időt határoz meg az új helységre - ha kezd lemerülni az akkumulátora, ismét nem veszi figyelembe a virtuális falakat, keresi a dokkoló jelét, miközben takarít nagyobb szögekben fordul el ha észleli a dokkoló jelét akkor odamegy hozzá és szemből beáll feltölt - ha nem végzett a teljes területtel a virtuális falakon keresztül megkeresi a félbehagyott részt újrakezdi a folyamatot")
11
Takarítási szisztéma Véletlenszerű Addig megy amíg neki nem ütközik valaminek, de az akadály előtt lelassít A szoba méreteinek becslése után időhöz kötött Ha szűkebb helyeket, sarkokat észlel elfordul és megy tovább Falak mentén képes végigmenni Észleli a sarkokat és kisebb (10- 15°) elfordulásokat csinál Tájékozódási pontok: dokkoló, virtuális falak Nagyobb szennyeződéseket érzékeli olyankor 150-180°-os fordulatokat tesz, többször átmegy a területen Spot mód – spirális indulás
 elfordulásokat csinál Tájékozódási pontok: dokkoló, virtuális falak Nagyobb szennyeződéseket érzékeli olyankor °-os fordulatokat tesz, többször átmegy a területen Spot mód – spirális indulás")
12
Köszönöm a figyelmet! Források: Animációk www.youtube.com -on található videókból a www.makeagif.com-on keresztülwww.youtube.com www.makeagif.com-on Képek forrása: google Működés www.electronics.howstuffworks.comwww.electronics.howstuffworks.com www.geeks.hu

Hasonló előadás



















 Eredeti levelek (köztük a Fannihoz írott két utolsó.>")