Előadást letölteni
Az előadás letöltése folymat van. Kérjük, várjon

1
RoboBees projekt A HARVARD EGYETEM PROJEKTJÉNEK BEMUTATÁSA Kiss Bernadett

2
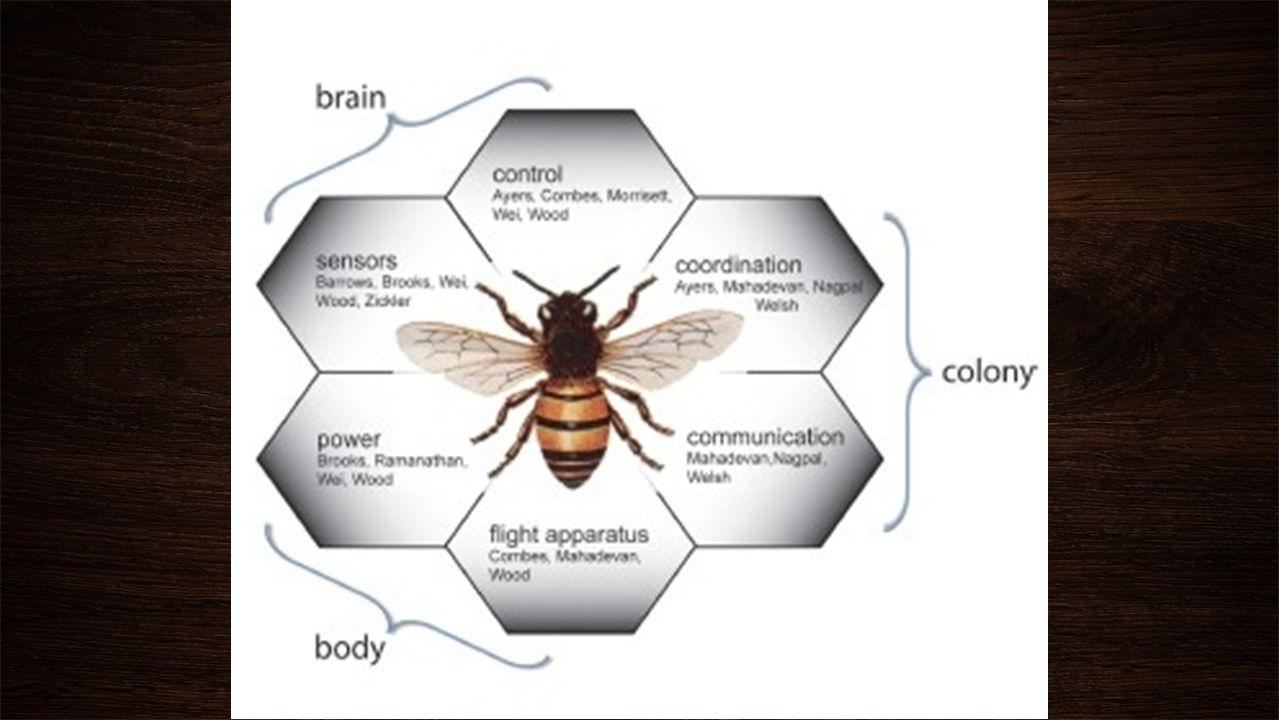
A projekt céljai: a méhek biológiáját és a méhrajok viselkedését alapul véve: o miniatűr robotok o kompakt nagyenergiájú áramforrások o kis energiafelhasználású „okos szenzorok” o több, különálló robotra koordinációs algoritmusok létrehozása lehetséges felhasználási területek: o önállóan növények beporzása (Colony Collapse Disorder miatt, de arra nem nyújtana észszerű megoldást csak helyettesítést) o kutatás és mentés (pl. egy természeti katasztrófa után) o veszélyes környezet felderítése o katonai célok o nagy felbontású időjárás- és klíma-feltérképezés o közlekedés feltérképezése
 o veszélyes környezet felderítése o katonai célok o nagy felbontású időjárás- és klíma-feltérképezés o közlekedés feltérképezése.")
4
A projekt céljai: több, különálló kutatást egyesít a projekt, hogy közösen- szakértőkkel a biológia, számítógépes tudományok, gépészet, elektronika területéről- több legyen az egész a részek összességénél 3 részben folyik a kutatás: Test, Agy, Csoportviselkedés

6
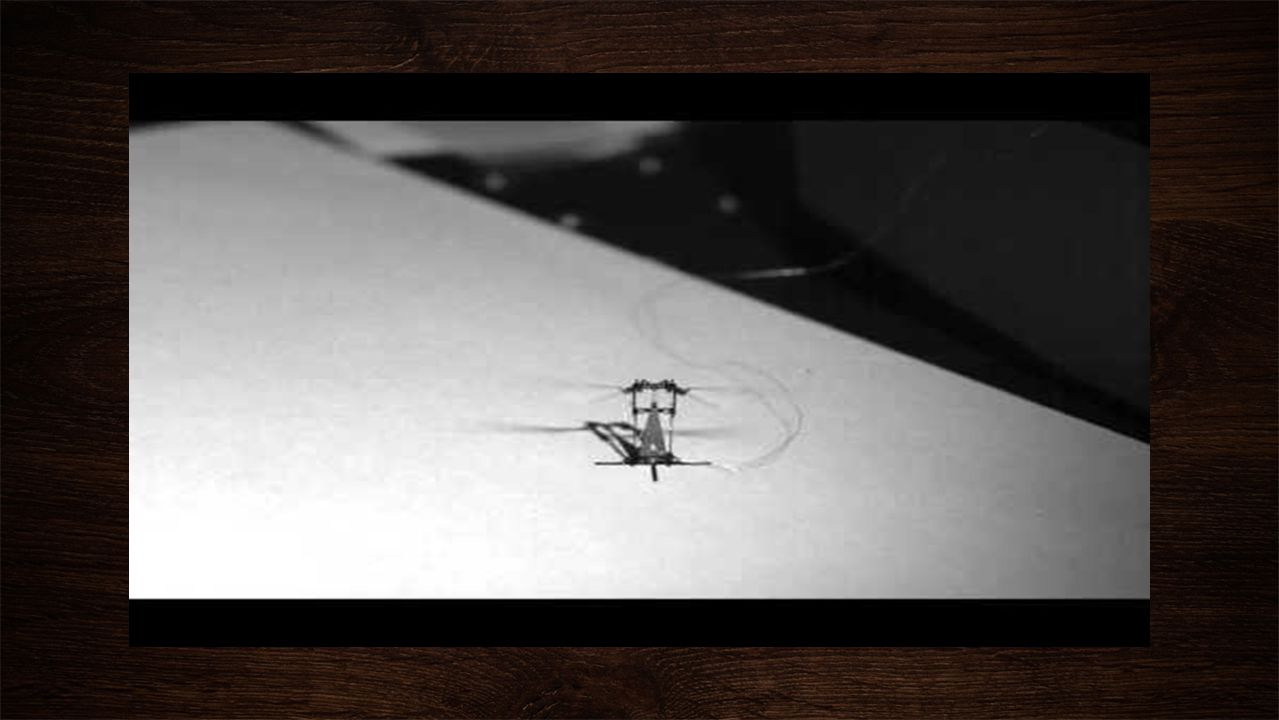
TEST fő munka itt a legyezőszárnyú robot fejlesztése; ehhez a szabadon repülés mechanikáját tanulmányozzák Wood professzor mikrorobotika laboratóriumában 2007-ben áttörést értek el: az első sikeres életnagyságú robot-légy repülésével most az önálló repüléshez a robot aerodinamikáját, valamint a kompakt nagyenergiájú áramforrásokat fejlesztik. az aerodinamikához a rovarok biomechanikáját és a legyezőszárnyak által létrehozott áramlásokat tanulmányozzák ez alapján a pontos tervezés nagyfontosságú, hiszen a hatékonyság a repülési időt, a teherbírósága pedig a méretet és a szenzorok, kommunikációs eszközök és egyéb elektronikák tömegét határozzák meg

8
TEST

9
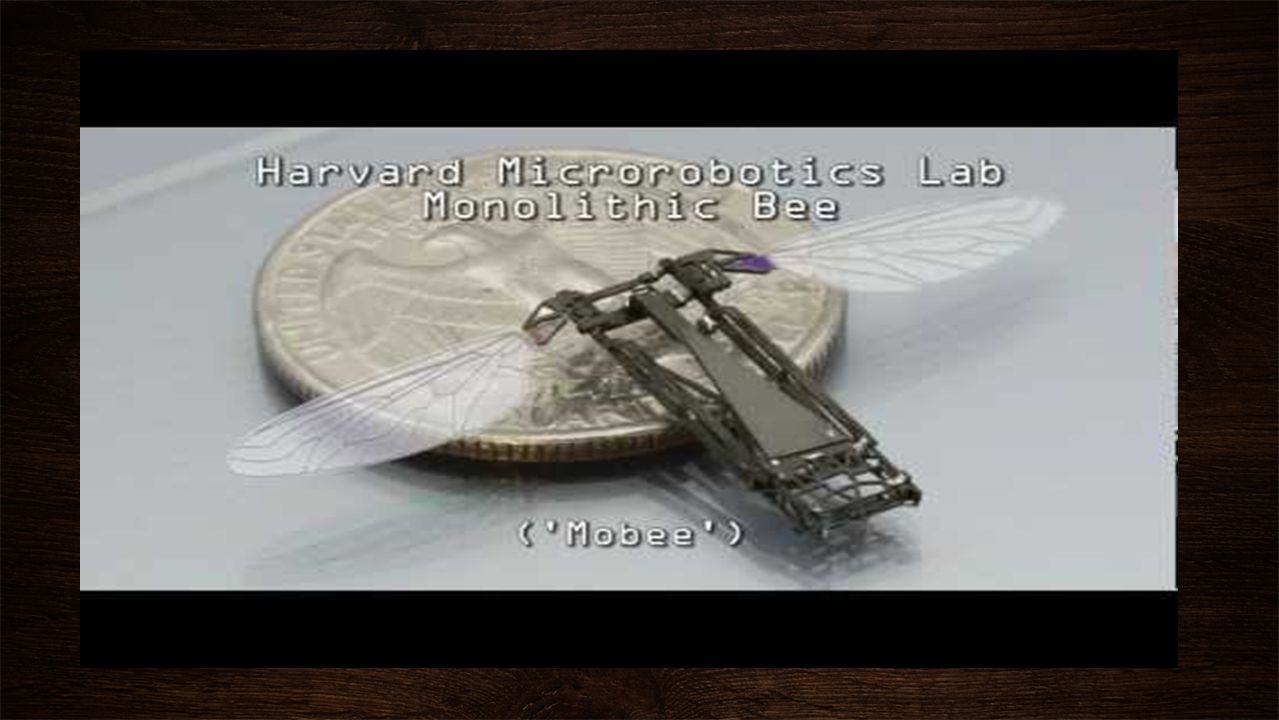
modellként a legyeket (Diptera) használták, 2 szárny, jól tanulmányozható: o 3 forgási szabadságfok által meghatározhatók o kulcsfontosságú a szárnymozgásban a legyezés frekvenciája és amplitúdója (robotlégy: 120 Hz, 110) o a szárny terjedelmét a zengőlégy (Eristalis) inspirálta a méret miatt új előállítási technológiát fejlesztettek ki: SCM (smart composite microstructures): o lézeres ömlesztéssel és masszív ragasztóval vannak a lapok összelaminálva (5μm akár), hajtogatással összeillesztve megfelelően a részek o az összes elektromechanikai rész: izmok, tor, váz, szárnyak-SCM-mel lettek előállítva
 használták, 2 szárny, jól tanulmányozható: o 3 forgási szabadságfok által meghatározhatók o kulcsfontosságú a szárnymozgásban a legyezés frekvenciája és amplitúdója (robotlégy: 120 Hz, 110) o a szárny terjedelmét a zengőlégy (Eristalis) inspirálta a méret miatt új előállítási technológiát fejlesztettek ki: SCM (smart composite microstructures): o lézeres ömlesztéssel és masszív ragasztóval vannak a lapok összelaminálva (5μm akár), hajtogatással összeillesztve megfelelően a részek o az összes elektromechanikai rész: izmok, tor, váz, szárnyak-SCM-mel lettek előállítva")
10
TEST új összeállítási technika: MEMS-microelectromechanical systems: o mint a gyerekek hajtogatós könyvét, tudják hajtogatni a többrétegű kompozit szerkezeteket egy sima mozdulattal o ezzel a technikával bármilyen 3D-s integrált elektronikai rendszert létrehozhatunk (orvosi eszközök, nagy teljesítményű kapcsolók..)
")
12
TEST aktuátorokhoz „törzsindukciós” anyagok-piezoelektromos kerámiák felhasználása: o repülőizmok-feszültségre érzékeny piezoelektromos bimetálok-> kétirányú erőt tudnak létrehozni+előállítási módszerükkel kompatibilis+geometriája miatt energiasűrűsége optimalizált (általa tárolt energia maximális) o a bimetálok kismértékű elmozdulását egy 4 áttételes karral erősítik fel o kiindulásként szinuszosan gerjesztik a piezoeletromos repülőizmokat az izom-tor-szárny közös rezonáns frekvenciájához közel-energiaigényét a reakcióerőknek így minimalizálják 2. szabadsági fok-szárnyelfordulás egy passzív, rugalmas hajlítható csuklóval kapcsolódik a szárny a torhoz: o mozgását aerodinamikus, rugalmas és a belső erők határozzák meg o az aerodinamikus erő növelhető, ha a szárnyban egy vénát megkeményítenek

13
TEST az előzőekben 1 aktuátorral működtették a 2 szárnyat, most 2 különálló repülőizom irányítja egymástól függetlenül a szárnyakat mind3 tengelyre a nyomatékokat külön lehet állítani korlátlan repülést tesz lehetővé stabilis repüléshez egy aktív repülés-irányító egységre van szükség: érzékelés és a számítógépes irányítás a repülő szerkezettől külön van, egy rézvezetéken küldve a tápot és a jeleket

14
TEST

15
repülésirányítás: 3 külön rész: testhelyzet(z tengely körüli elfordulás), oldalsó helyzet(z síkban x-y irányú oldalirányú elfordulás) és magasság megállapítására; a szárnyak csapásiránya és így tolóerővektorok iránya fixen marad a robot tengelyéhez képest ΣF= robot súlyának ellenereje + oldalirányú elfordulásért felelős erő a testhelyzetet irányító modul a legfontosabb ennek irányítási szabályát egy referenciahelyzettől való eltérésből és a szöggyorsulás deriváltjából határozzák meg ( így egy forgási csillapítást létrehozva); az oldalsó helyzetet irányító modul a testhelyzetet irányító modul kimenetét és a referenciahelyzetet felhasználva állítja elő a szükséges oldalirányú erőkomponenst a magasságirányító modul a robot dinamikáját használja fel és abból indul ki, hogy mindig normál helyzetben van a robot ez a leegyszerűsítés csökkenti a kényszereket így a másik 2 irányítómodul érzékenyebb lehet a szöggyorsulás deriváltja határozza meg főként a testhelyzet irányítást, ezt a természetben a halterekkel oldják meg a rovarok
, oldalsó helyzet(z síkban x-y irányú oldalirányú elfordulás) és magasság megállapítására; a szárnyak csapásiránya és így tolóerővektorok iránya fixen marad a robot tengelyéhez képest ΣF= robot súlyának ellenereje + oldalirányú elfordulásért felelős erő a testhelyzetet irányító modul a legfontosabb ennek irányítási szabályát egy referenciahelyzettől való eltérésből és a szöggyorsulás deriváltjából határozzák meg ( így egy forgási csillapítást létrehozva); az oldalsó helyzetet irányító modul a testhelyzetet irányító modul kimenetét és a referenciahelyzetet felhasználva állítja elő a szükséges oldalirányú erőkomponenst a magasságirányító modul a robot dinamikáját használja fel és abból indul ki, hogy mindig normál helyzetben van a robot ez a leegyszerűsítés csökkenti a kényszereket így a másik 2 irányítómodul érzékenyebb lehet a szöggyorsulás deriváltja határozza meg főként a testhelyzet irányítást, ezt a természetben a halterekkel oldják meg a rovarok")
18
TEST a rovarok ocellit és haltereket használnak helyzetük megállapítására –(halter-hátsószárnyból fejlődött ki, egy gyorsulásmérő eszköz ocelli-sima lencse,rovaroknak segít a nap felé tájékozódni) ocelli-szerű szenzorok segíteni tudnák a RoboBee repülésének stabilitását (kutatók): o Egy fényérzékelő a robot tetején a fény változását feszültségváltozássá konvertálná o a vízszint megtalálását segítené, innen pedig ebből az adatból kiszámolná a robot, hogy mennyit forduljon-ezt a szárnyak legyezésének frekvenciájára átszámolja és egy visszacsatolást is beleszerelnének, hogy függőleges pozícióban maradjon, kompenzáljon o a robot Fuller (kutató) szerint egy inga, aminek a lengését a szárnyak mérséklik a szenzorok információival
 ocelli-szerű szenzorok segíteni tudnák a RoboBee repülésének stabilitását (kutatók): o Egy fényérzékelő a robot tetején a fény változását feszültségváltozássá konvertálná o a vízszint megtalálását segítené, innen pedig ebből az adatból kiszámolná a robot, hogy mennyit forduljon-ezt a szárnyak legyezésének frekvenciájára átszámolja és egy visszacsatolást is beleszerelnének, hogy függőleges pozícióban maradjon, kompenzáljon o a robot Fuller (kutató) szerint egy inga, aminek a lengését a szárnyak mérséklik a szenzorok információival")
19
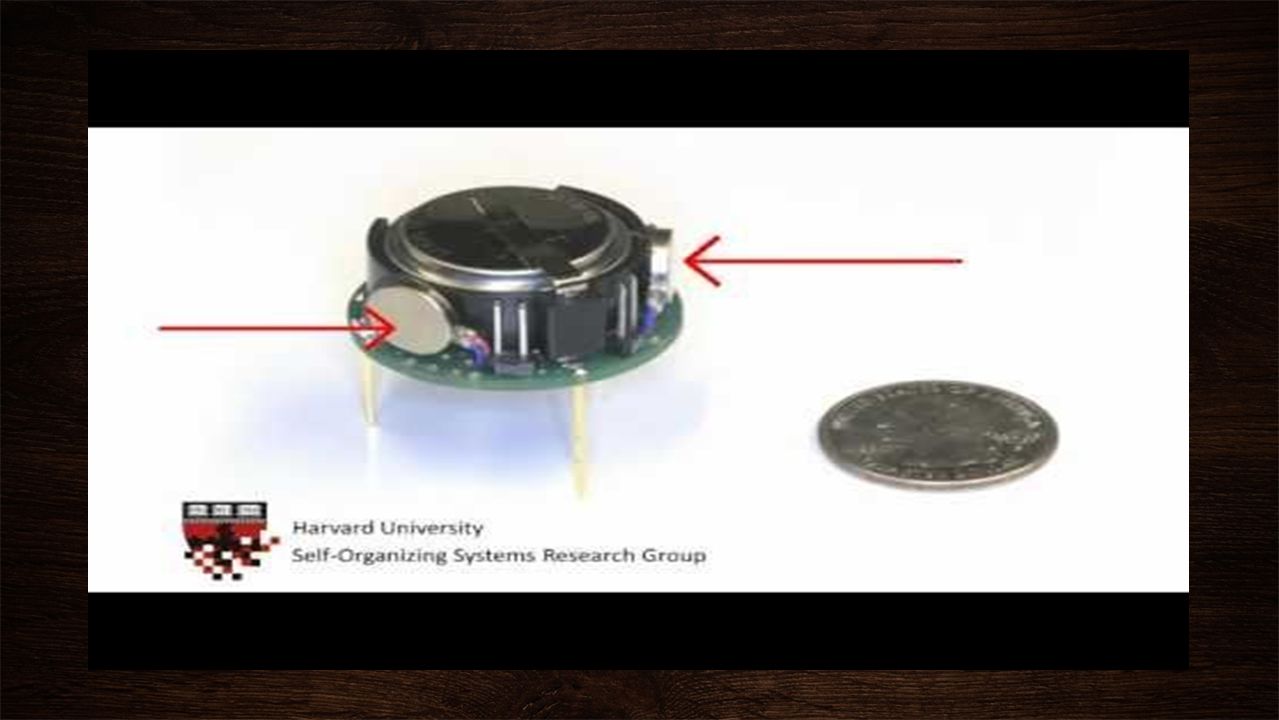
TEST energiaforrás miniatűr, önműködő rendszerekhez: vékony szilárd oxid elektrolit rétegből álló film, amit szilikonba és kaptonfilmbe ágyazva fejlesztettek ki vanádiumoxid-anód+katód-hidrogén/metán/földgáz

21
AGY

22
legnagyobb kihívás az „okosszenzorok” megalkotása, melyek a méhek szemeit és antennáját helyettesíteni tudják az agy feladata a repülés irányítása és megfigyelése, az eszközt körülvevő tárgyak megfigyelése és egyszerű döntések meghozatala egy másik kutatócsoport a belső-és külső érzékelésen, egy elektronikus idegrendszeren (ENS) és egy, az eszközöket közösen irányító algoritmuson dolgozik természetesen az eszközöket minél energiatakarékosabbá próbálják fejleszteni
 és egy, az eszközöket közösen irányító algoritmuson dolgozik természetesen az eszközöket minél energiatakarékosabbá próbálják fejleszteni")
23
CSOPORTVISELKEDÉS (Colony) a méhek, mint csoport nagyon alkalmazkodóak a külső változásokra és akár 2-6 km-es távolságokban felderítik a pollenforrásokat a biológusok szerint ez a csoportviselkedés a kaptárbeli méhek egy egyszerű interakciójából ered, azzal, hogy információt osztanak meg egymással, ami az egyéni döntéseiket befolyásolja; nincsen egy vezetője a kaptárnak, aki ezt az egész folyamatot irányítaná ezért algoritmusok kidolgozásán fáradoznak a kutatók, hogy a robotméhek együtt tudjanak dolgozni egy olyan rendszerre lenne szükségük, amely a robotraj egy nagyobb volumenű célját lefordítja az egyes robotméheknek és ezt a célt aztán a méhektől kapott visszajelzések alapján változtatja szoftverszintű alkalmazkodás/visszacsatolás ezek a kihívások sok más területén is megjelennek a számítógépes tudománynak: osztottszenzoros rendszerek, programozói nyelvek fejlesztése, szintetikus biológia..
 a méhek, mint csoport nagyon alkalmazkodóak a külső változásokra és akár 2-6 km-es távolságokban felderítik a pollenforrásokat a biológusok szerint ez a csoportviselkedés a kaptárbeli méhek egy egyszerű interakciójából ered, azzal, hogy információt osztanak meg egymással, ami az egyéni döntéseiket befolyásolja; nincsen egy vezetője a kaptárnak, aki ezt az egész folyamatot irányítaná ezért algoritmusok kidolgozásán fáradoznak a kutatók, hogy a robotméhek együtt tudjanak dolgozni egy olyan rendszerre lenne szükségük, amely a robotraj egy nagyobb volumenű célját lefordítja az egyes robotméheknek és ezt a célt aztán a méhektől kapott visszajelzések alapján változtatja szoftverszintű alkalmazkodás/visszacsatolás ezek a kihívások sok más területén is megjelennek a számítógépes tudománynak: osztottszenzoros rendszerek, programozói nyelvek fejlesztése, szintetikus biológia..")
24
CSOPORTVISELKEDÉS (Colony) 2 absztrakt nyelvet fejlesztettek ki: o a Karma nyelv: egy feladatokból álló folyamatábra, amelybe bele vannak ágyazva azok a feltételek, amitől az újabb feladatot megkapják a robotok. Azt az információt használja fel, ami az egyénektől visszaérkezik és ezt használja fel az egyének közötti feladatkiosztásra, hogy mi lesz a szerepük a kaptárban. az OptRAD (Optimizing Reaction-Advection-Diffusion): úgy kezeli a robotok összességét, mint egy folyadékot, ami a környezetben terjed. o Az egyes robotok egy valószínűségi algoritmust használnak a saját környezetüket alapul véve, hogy megállapítsák, hogy egy feladatot elvégezzenek vagy sem
: úgy kezeli a robotok összességét, mint egy folyadékot, ami a környezetben terjed. o Az egyes robotok egy valószínűségi algoritmust használnak a saját környezetüket alapul véve, hogy megállapítsák, hogy egy feladatot elvégezzenek vagy sem.")
26
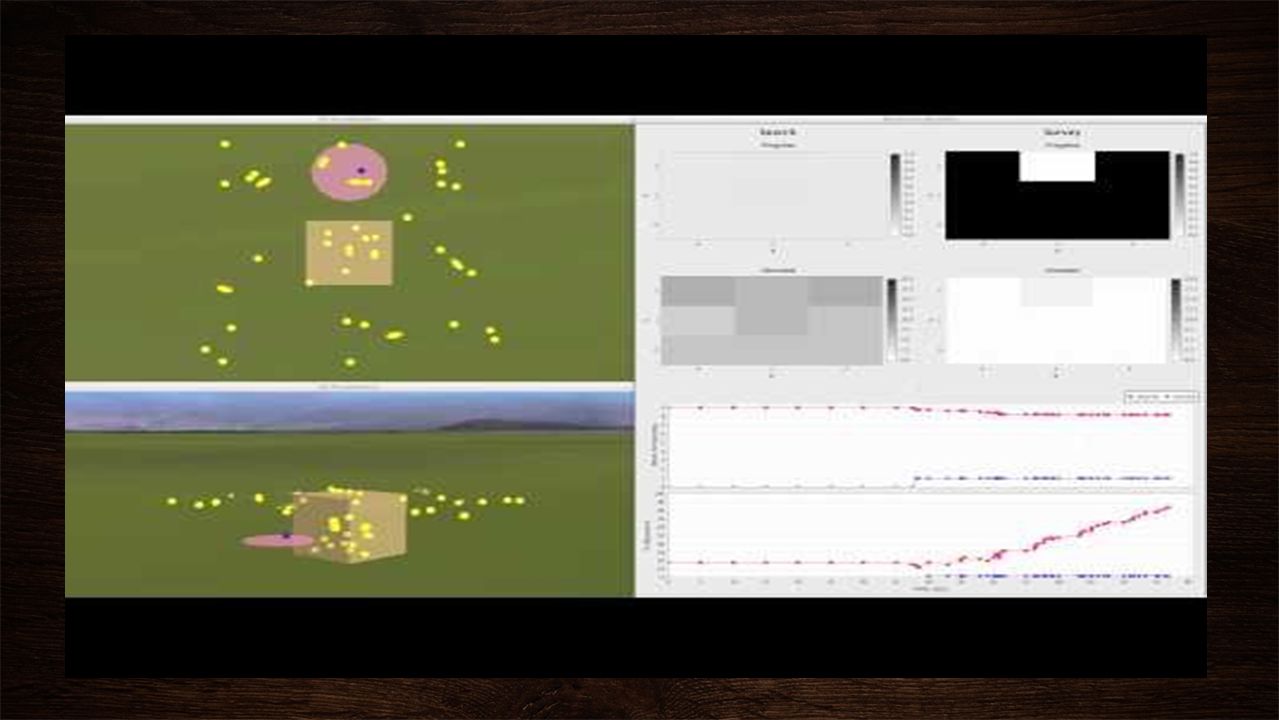
CSOPORTVISELKEDÉS (Colony) Ezeken kívül teszthálózatok/tesztkörnyezeteket is fejlesztenek, hogy tanulmányozzák nagy rajok viselkedését, például a Simbeeotic szimulátor is ilyen. a projekt a Kilobot rendszer fejlesztéséhez is hozzájárult (ezek is egymással kommunikáló robotok)
.")
28
A kutatásban résztvevő professzorok: Robert Wood (Principal Investigator) Associate Professor of Electrical Engineering Harvard SEAS Wyss Institute for Biologically Inspired Engineering Gu-Yeon Wei Professor of Electrical Engineering Harvard SEAS Radhika Nagpal Associate Professor of Computer Science Harvard SEAS Wyss Institute for Biologically Inspired Engineering Greg Morrisett Allen B. Cutting Professor of Computer Science Associate Dean for Computer Science and Engineering Harvard SEAS Joseph Ayers Professor Dept. of Biology and Marine Science Center Northeastern UniversityMarine Science Center David Brooks Gordon McKay Professor of Computer Science Harvard SEAS

29
A kutatatásban résztvevő professzorok: Stacey Combes Assistant Professor of Organismic & Evolutionary Biology Department of Organismic and Evolutionary Biology Harvard Faculty of Arts and Sciences L. Mahadevan Lola England de Valpine Professor of Applied Mathematics Harvard SEAS Wyss Institute for Biologically Inspired Engineering Shriram Ramanathan Associate Professor of Materials Science Harvard SEAS Todd Zickler Professor of Electrical Engineering Harvard SEAS

31
Köszönöm a figyelmet!

32
Források: http://micro.seas.harvard.edu/ http://wyss.harvard.edu/viewpage/536 http://wyss.harvard.edu/viewpage/457 http://robobees.seas.harvard.edu/ http://www.the-scientist.com/?articles.view/articleNo/40278/title/Insect-Inspired-Sensors-Improve-Tiny-Robot-s- Flight/ http://www.sciencemag.org/content/340/6132/603 A videók: https://www.youtube.com/watch?v=VxSs1kGZQqc&list=PL294Y-sOWrG-mSq7xEKs9Q_3dUc3Q6_NY&index=1 https://www.youtube.com/watch?v=Z1XA7klBiCA&list=PL294Y-sOWrG-mSq7xEKs9Q_3dUc3Q6_NY&index=3 https://www.youtube.com/watch?v=c8LkcgYRHdA&list=PL294Y-sOWrG-mSq7xEKs9Q_3dUc3Q6_NY&index=2 https://www.youtube.com/watch?v=ISMwLCFwgK4&list=PL294Y-sOWrG-mSq7xEKs9Q_3dUc3Q6_NY&index=4 https://www.youtube.com/watch?v=8_iI9B6EgKU https://www.youtube.com/watch?v=o2WkIqXdBrQ https://www.youtube.com/watch?v=MUq446uk4jM

Hasonló előadás












 Kinect/ROS/ Linux Interface ROS Linux – Apache web statisztikák Lehetséges feladatok.>")









