Előadást letölteni
Az előadás letöltése folymat van. Kérjük, várjon

1
Robot kezek/megfogók Grippers/hands a short introduction / bevezetés Kovács, G. L.

2
Grippers For Robots, Megfogók, kezek
One of the most important aspects of the robot is its EOAT (End of Arm Tooling).(Kar-vég szerszám) That is where grippers for robots come into play. A robot gripper serves as the physical interface that a robot performs an application. A megfogó egy fizikai interfész, amely egy alkalmazást hajt végre. There are four robot gripper types, típusai: vacuum grippers, vákuumos pneumatic grippers, pneumatikus hydraulic grippers, hidraulikus and servo-electric grippers. szervo-elekromos
.(Kar-vég szerszám) That is where grippers for robots come into play. A robot gripper serves as the physical interface that a robot performs an application. A megfogó egy fizikai interfész, amely egy alkalmazást hajt végre. There are four robot gripper types, típusai: vacuum grippers, vákuumos. pneumatic grippers, pneumatikus. hydraulic grippers, hidraulikus. and servo-electric grippers. szervo-elekromos.")
3
Vacuum Grippers: This type of gripper has been the standard EOAT in manufacturing, allowing for the most flexibility out of all the robot gripper types. Vacuum grippers can be funneled through a rubber or polyurethane suction cup. They may also be funneled through a closed-cell foam rubber layer, thus generating a vacuum suction of compressed air. Gyártáshoz szabvány volt, a legrugalmasabb Gumi vagy poliuretán csővel, Zárt cellájú gumiréteggel Sűrített levegő vakuum

4
Pneumatic Grippers: This is the most popular type of gripper due to its compact size, light weight, and force. They can easily be incorpated into tight work cells, which can come in handy in manufacturing. Pneumatic grippers can be either opened or closed, earning them the nickname "bang bang" actuators because of the "bang" sound created by the metal-on-metal punctuation when operated. A legnépszerűbb – kicsi, könnyű, erős Könnyen beépíthető Nyitott vagy zárt – „bang bang” – fém a fémen

5
Hydraulic Grippers: These grippers for robots provide the most strength and are often used for applications that require a significiant amount of force. They generate their strength from pumps that can provide 2000 psi (N/m2) and more. Although they are strong they can bring more mess with oil used in the pumps and may damage the end effector with their great force. A legerősebbek > 2000 psi (N/m2) Összetörhetik a végszerszámot Pumpák olaját folyatva koszolhatnak
 and more. Although they are strong they can bring more mess with oil used in the pumps and may damage the end effector with their great force. A legerősebbek > 2000 psi (N/m2) Összetörhetik a végszerszámot. Pumpák olaját folyatva koszolhatnak.")
6
Servo-Electric Grippers:
These types of grippers are appearing more and more frequently in industrial settings due to the fact that they are easy to control. Electronic motors control the movement of the gripper jaws through an electronic control. These grippers allow for flexibility in gripper strength when handling parts. They can detect if an object has been picked up by the robot through encoders. Servo-Electric grippers are also the cleanest and most cost effective with no air lines. Könnyen vezérelhetők – népszerűek Rugalmasan változó erők – elektromos kontrol Kódadók – detektálja a felvett objektumot Legtisztább, legolcsóbb (nincs olaj- és levegő-cső)
")
7
To ensure successful automation applications, choosing the proper gripper is essential. When deciding on a robot gripper type keep in mind the automation process you want to perform and the parts to be handled. RobotWorx is an expert in integrating the best robotic grippers for many kinds of industries. Automatizálási folyamathoz, figyelembe kell venni a kezelendő alkatrészeket és megfelelő robotkezet kell választani és integrálni az ipari rendszerbe

9
When referring to robotic prehension (fogás) there are four general categories of robot grippers, these are: Impactive – jaws or claws which physically grasp by direct impact upon the object. Ütközéses Ingressive – pins, needles or hackles which physically penetrate the surface of the object (used in textile, carbon and glass fibre handling). Behatoló Astrictive – suction forces applied to the objects surface (whether by vacuum, magneto– or electro-adhesion) Szívó-tapadó Contigutive – requiring direct contact for adhesion to take place (such as glue, surface tension or freezing) Közvetlen adhéziós, tapadó
. Behatoló. Astrictive – suction forces applied to the objects surface (whether by vacuum, magneto– or electro-adhesion). Szívó-tapadó. Contigutive – requiring direct contact for adhesion to take place (such as glue, surface tension or freezing). Közvetlen adhéziós, tapadó.")
10
An example of a basic gripping end effector/egy példa

11
A spot welding end effector / ponthegesztés

12
A laser welding end effector / lézeres hegesztés

13
A repair and observation end effector in use in space
Megfigyelés, javítás az űrben

14
A highly sophisticated attempt at reproducing the human end effector / ember utánzás

15
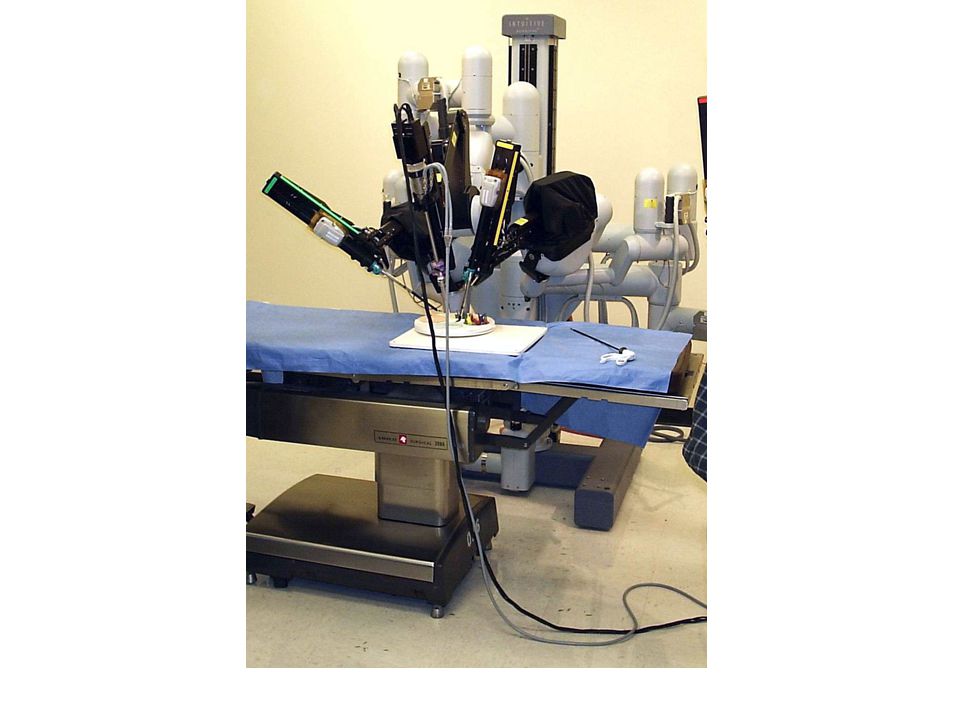
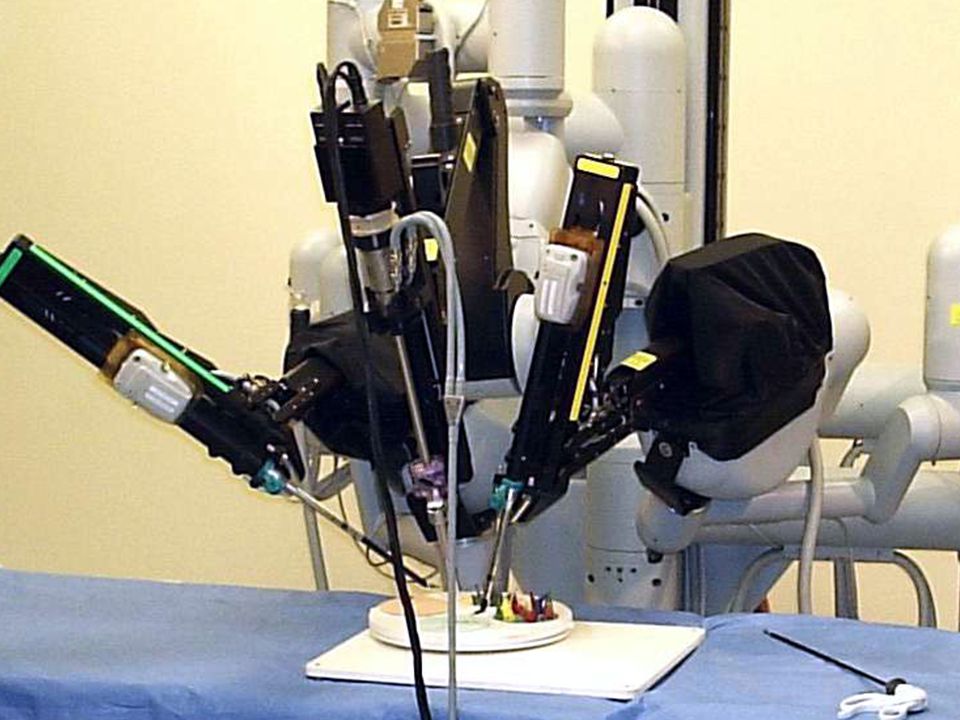
Da VINCI távolból irányított, távsebészet (remote surgery)
minimális behatolást alkalmazó (minimally invasive) operáció, és emberi beavatkozás nélküli (unmanned) operáció.
 operáció, és. emberi beavatkozás nélküli (unmanned) operáció.")
16
A szervezet traumájának lecsökkentése
Gyorsabb operáció - kevesebb vérveszteség (alig kell vérátömlesztés) Csökkent operáció utáni fájdalom Az operáció következtében előálló fertőzés valószínűségének lecsökkenése Rövidebb kórházi tartózkodás Gyorsabb felépülés Kisebb sebhely
 Csökkent operáció utáni fájdalom. Az operáció következtében előálló fertőzés valószínűségének lecsökkenése. Rövidebb kórházi tartózkodás. Gyorsabb felépülés. Kisebb sebhely.")
20
Dr. Ránky Pál: Ipari robotok programozása és alkalmazása / Könyv, 1986

21
Dr. Ránky Pál: Robot kezek, szerszámok és robot kézcserélők
Alcím: Alkalmazási és oktatási segédlet Kiadó: Ipari Informatikai Központ A kiadás helye: Budapest A kiadás éve: 1986 Sorozatcím: Bevezetés a számítógéppel irányított gépipari rendszerekbe Kötetsorszám: 3 ISBN-szám: Kötéstípus: Tűzött kötés Oldalszám: 159

22
Egyelőre ennyi, köszönöm !!

Hasonló előadás

















 n Áttekintés n Példák.>")



