Előadást letölteni
Az előadás letöltése folymat van. Kérjük, várjon

1
NAGYMÉRETŰ RÁCSOS TÉRLEFEDÉSEK OPTIMÁLIS TERVEZÉSE
HABILITÁCIÓS TÉZISEK Csébfalvi Anikó Borbála

2
BEVEZETÉS Napjaink attraktív építészeti alkotásaira oly jellemző nagyméretű, de ugyanakkor légiesen könnyed, szinte szárnyaló mérnöki szerkezetek tervezése mögött összetett, nehezen kezelhető, igazi kihívást jelentő szerkezeti és optimalizálási modellek húzódnak meg. A nagyteres, vagy nagy fesztávú többfunkciós építészeti alkotások acélszerkezetű, illetve ragasztott fatartóval történő térlefedése önmagában is jelentős feladatot jelent az építészek és szerkezettervezők számára egyaránt. Az 1990-es évek második felében, de leginkább az elmúlt század utolsó évtizedében jelentek meg azok az alkotások, ahol az újonnan kifejlesztett korszerű építőanyagok megjelenésével, a tervezők szárnyaló fantáziájával és magas szakmai ismereteivel a hagyományos szerkezeteket felülmúló nagy fesztávú sportlétesítményeket, koncertközpontokat, kiállítási csarnokokat, múzeumokat, vagy már meglévő épületek rekonstrukciója, illetve bővítése kapcsán új épületrészeket hoztak létre a tervezők.

3
BEVEZETÉS Habilitációs értekezésem témája a nagyméretű rácsos térlefedések optimális tervezése, ami mögött több mint egy évtizedre visszavezethető kutatási munkám eredményei állnak. Kandidátusi értekezésem eredményeire alapozva fejlesztettem ki azt a szerkezeti modellt, azt a numerikus eljárást, ami lehetővé tette a továbbiakban a hatékony szerkezettervezési optimalizálási módszerek kidolgozását. Optimális szerkezettervezésről nem beszélhetünk anélkül, hogy pontos információval ne rendelkeznénk a szerkezet valóságos viselkedését illetően. Ha az optimalizálási módszerek végrehajthatósága miatt olyan egyszerűsített szerkezeti modellt alkalmazunk, amely esetén nincs lehetőségünk, például a szerkezet stabilitás vizsgálatára, akkor nemhogy nem gazdaságos, de még csak nem is állékony szerkezetet hozunk létre.

4
BEVEZETÉS Az első tézis és annak altézisei azokra a korai publikációimra épülnek, amelyek alapján bizonyítható, hogy az általam vizsgált stabilitásvesztésre érzékeny szerkezetek esetén az útkövető módszer az optimalizálási eljárás nélkülözhetetlen eleme. A második tézis és annak altézisei azt taglalják, hogy az útkövető módszer, mint az optimalizálás magja természetes módon illeszkedik bármilyen heurisztikus optimalizálási keretrendszerhez. A harmadik tézis és annak altézisei tartalmazzák az általam kidolgozott ANGEL meta-heurisztikus módszer lényegét és annak alkalmazását minimális súlyú, folytonos és diszkrét keresztmetszeti, illetve geometriai változókkal jellemzett optimális szerkezettervezési feladatokra.

5
OPTIMÁLIS SZERKEZETI MODELL
A nagyméretű, rendszerint lapos, térbeli rácsos lefedések optimális tervezésekor a hagyományos szerkezeti modellt, egy olyan útkövető modellel kell helyettesítenünk, amely képes a terhelési folyamat teljes élettörténetének adekvát leírására, az esetleges rejtett stabilitási problémák felfedésére. Az útkövető stratégia fontos sajátossága, hogy invariáns a szerkezeti modell típusára, a szerkezeti választ meghatározó változók sajátosságaira, vagyis azonos módszertani elemekkel vizsgálható a szerkezetet alkotó rúdelemek kihajlása, megfolyása, illetve a szerkezet egészének összeomlása, azaz globális stabilitás vesztése.

6
OPTIMÁLIS SZERKEZETI MODELL
A térbeli rácsos tartók esetében a minimális súlyra való törekvés olyan szerkezeti megoldásokhoz vezethet, amelyek állékonysága, a környezeti és az építési pontatlanságokból adódó hatásokkal szembeni érzéketlensége, az "optimális" megoldás optimalitása a hagyományos modellezési eljárásokkal megnyugtató módon nem vizsgálható. A modellezési eljárás magját egy olyan szerkezeti modellel kell helyettesítenünk, amely egy adott szerkezet esetében képes a terhelési folyamat teljes élettörténetének leírására, a "rejtett" stabilitási problémák felfedésére, vagyis a szerkezet valóságos viselkedésének leírására.

10
OPTIMÁLIS SZERKEZETI MODELL
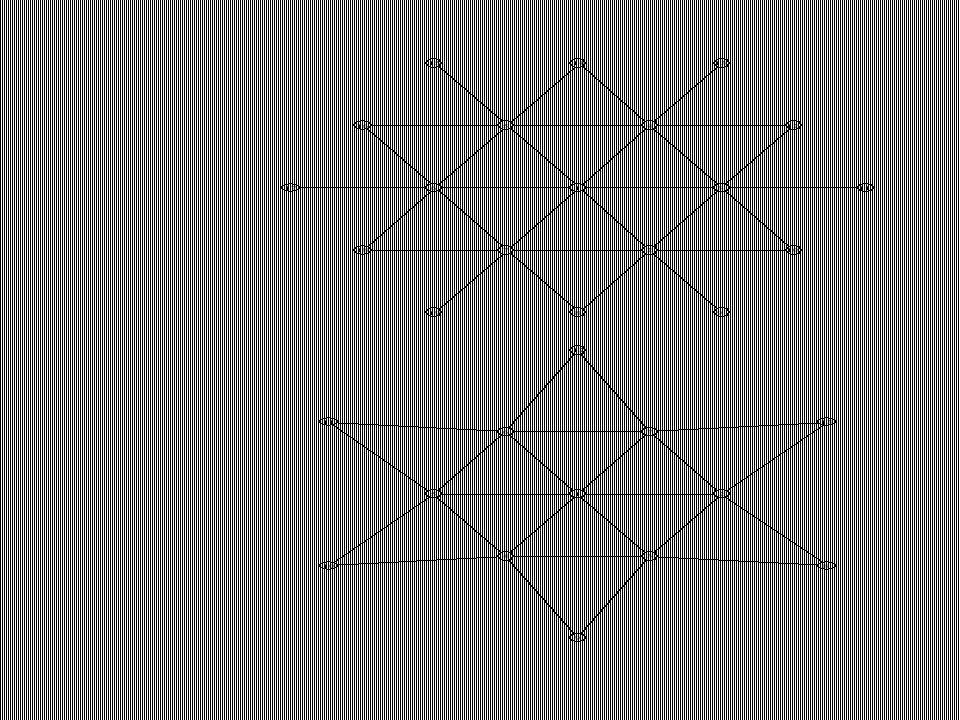
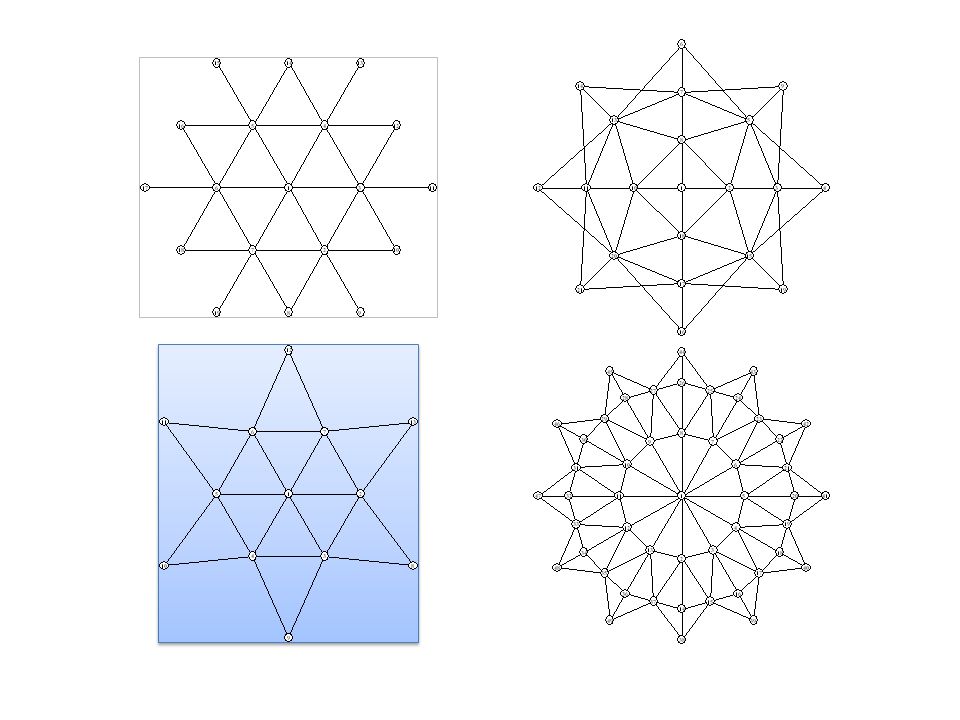
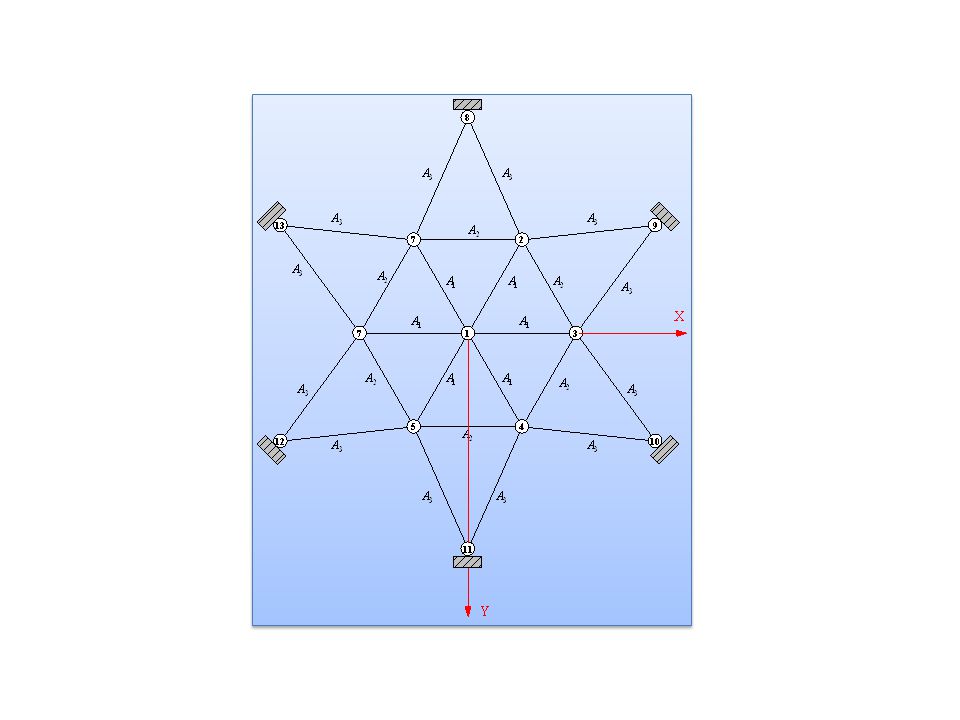
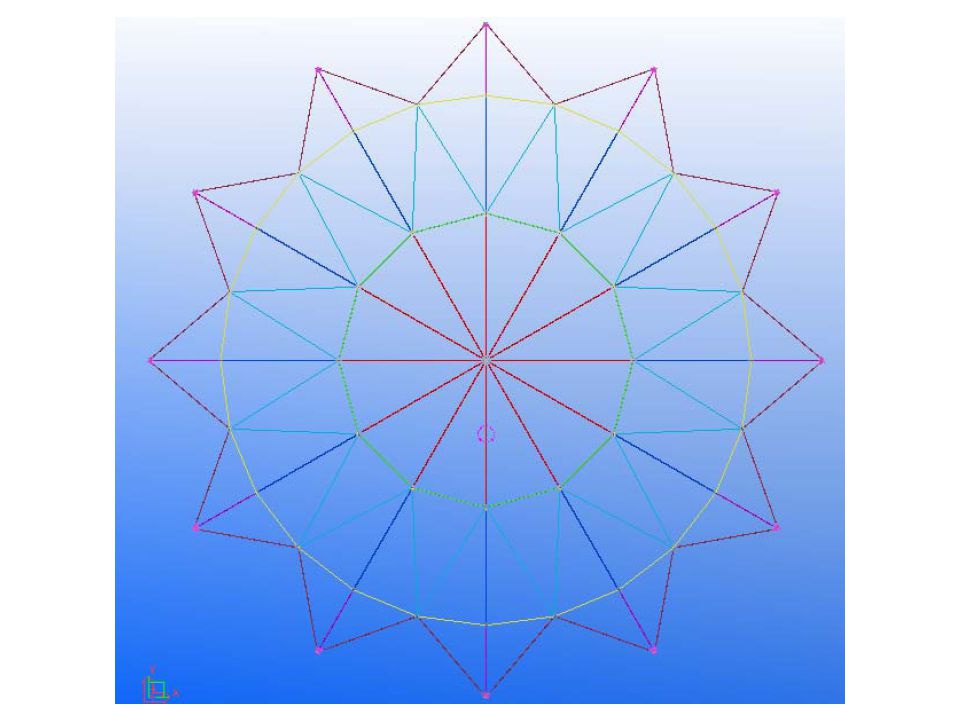
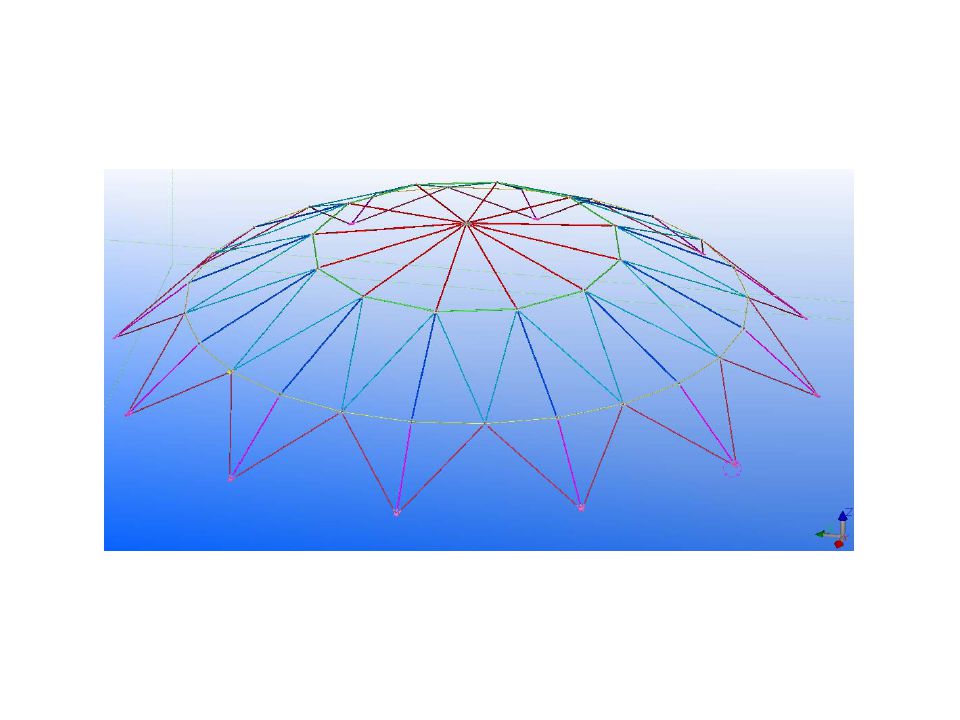
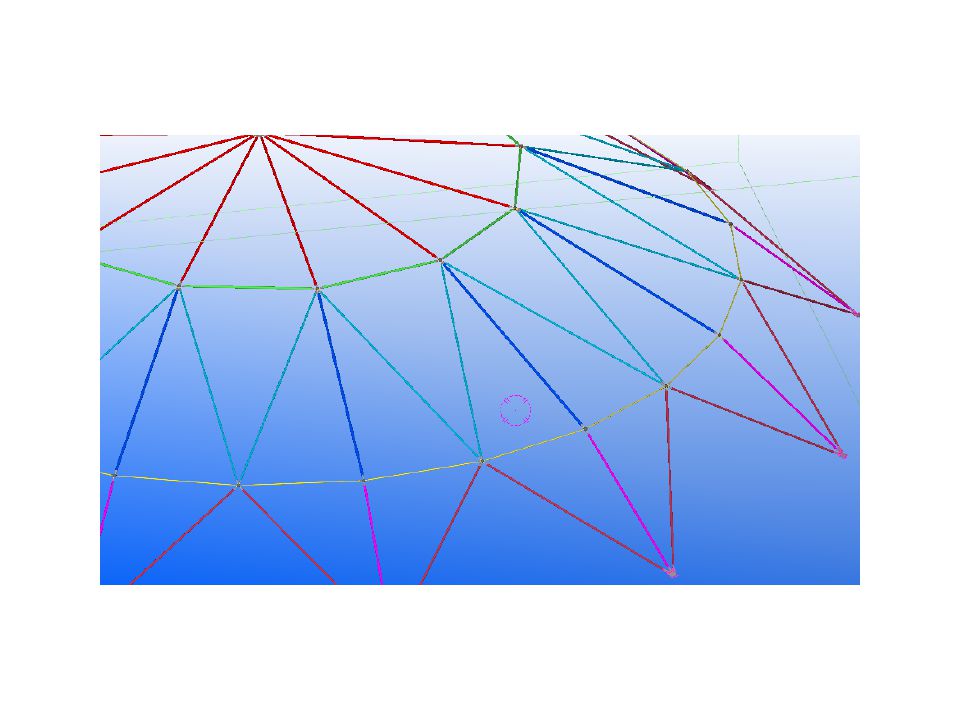
Ahhoz, hogy a szerkezet viselkedéséről adekvát képet kapjunk, a hagyományos pontszerű megközelítést egy függvényszerű megközelítéssel kell helyettesítenünk, ami a teljes terhelésnek megfelelő egyensúlyi pont meghatározása helyett, a teljes terhelés eléréséig vezető egyensúlyi út meghatározását jelenti. A probléma lényegét a szakirodalom egyik közismert mintafeladatára vonatkozó számítási eredményeinkkel szemléltetjük. Az egyszerű, csillag alakú lapos rácsos térlefedési példa a gyakorlatban előforduló összes stabilitás vesztési probléma bemutatására alkalmas.

11
OPTIMÁLIS SZERKEZETI MODELL
A következő ábrák az útkövető módszer lényegét, az első-, másod-, illetve harmadrendű lépések alkalmazásával bejárható egyensúlyi utak hosszát szemléltetik rögzített lépésszám esetén. A szerkezet optimalizálási modellek implicit modellek, számottevő függvény kiértékelési idővel. A tervezési és a szerkezeti választ leíró változók száma nagy, a tervezési változók nem feltétlenül folytonosak, az elméleti szerkezeti modell nemlineáris és nemkonvex, azaz az optimalizálás eredménye a lokális megoldások bármelyike lehet.

12
Az útkövető módszert, az első-, másod-, illetve harmadrendű lépések alkalmazásával bejárható egyensúlyi utakkal szemléltetjük.

13
Az útkövető módszert, az első-, másod-, illetve harmadrendű lépések alkalmazásával bejárható egyensúlyi utakkal szemléltetjük.

14
Az útkövető módszert, az első-, másod-, illetve harmadrendű lépések alkalmazásával bejárható egyensúlyi utakkal szemléltetjük.

15
1A. TÉZIS Kutató munkám első lépéseként kifejlesztett FollowMe útkövető módszert, mint vizsgálati eszközt, elsődlegesen rácsos tartók viselkedésének vizsgálatára dolgoztam ki. A módszer a terhelési folyamatot jellemző egyensúlyi utat első-, másod-, vagy harmadrendű lépések sorozatával írja le, amelyek egymáshoz a megadott rendig folytonosan illeszkednek. Az útkövető módszer egzakt analitikus deriváltakkal számol, a parciális deriváltakat tartalmazó maximum negyedrendű tenzorok számítási időre optimalizált alakját a Mathematica (Wolfram Research) programcsomag szimbolikus számításokra alkalmas elemeinek segítségével állítottam elő.
 programcsomag szimbolikus számításokra alkalmas elemeinek segítségével állítottam elő.")
16
1B. TÉZIS Későbbi munkám során, a szerkezet optimalizálás irányába történő elmozdulás eredményeként, hamar nyilvánvalóvá vált, hogy a lapos, szokatlan viselkedésre (például átpattanásra) hajlamos térlefedések optimalizálásakor az útkövető módszer az optimalizálási eljárás nélkülözhetetlen eleme, ami a szerkezeti stabilitás vizsgálatakor a hagyományos pontszerű leírást adó modellekkel semmilyen formában nem helyettesíthető. Hangsúlyoznom kell, hogy szerkezetoptimalizálási feladatok esetében az egyensúlyi utat csak a teljes terhelés vagy az első instabil pont eléréséig kell követnünk, ami a közelítés rendjétől függően csak egy-két lépést jelent.
 hajlamos térlefedések optimalizálásakor az útkövető módszer az optimalizálási eljárás nélkülözhetetlen eleme, ami a szerkezeti stabilitás vizsgálatakor a hagyományos pontszerű leírást adó modellekkel semmilyen formában nem helyettesíthető. Hangsúlyoznom kell, hogy szerkezetoptimalizálási feladatok esetében az egyensúlyi utat csak a teljes terhelés vagy az első instabil pont eléréséig kell követnünk, ami a közelítés rendjétől függően csak egy-két lépést jelent.")
17
1C. TÉZIS A módszer optimalizálási környezetben történő felhasználásakor kihasználható az a tény, hogy az egyensúlyi utat az első határpont előtt, és főleg a kezdeti szakaszban viszonylag lassú változások jellemzik, vagyis egy másod- vagy harmadrendű lépéssel, kielégítő pontossággal, elég messzire el tudunk jutni. Mivel optimalizálási problémáról van szó, ezért a "sok olcsó de kis lépés vagy néhány drágább de hosszú lépés" dilemmája sokkal kevesebb problémát vet fel, mint amikor a szerkezet teljes élettörténetének megismeréséről, vagyis egy igen hosszú és kanyargós út bejárásáról van szó.

18
IRODALMI HIVATKOZÁSOK
Csébfalvi, A. (1998), Nonlinear path-following method for computing equilibrium curve of structures, Annals of Operation Research 81, Csébfalvi, A. (2000), Discrete optimization of shallow trusses with stability constraints, in: D. Camotim, D. Dubina, J. Rondal, eds., Proceedings of Third International Conference on Coupled Instabilities in Metal Structures (CIMS’2000), September 21-23, 2000, Lisbon, Portugal, 2000, pp ISBN Csébfalvi A. (2004), Discrete Optimal Design of Space Trusses with Plastic Collapse Constraints, Proceedings of CIMS ’04, Fourth International Conference on Coupled Instabilities in Metal Structures, September, 2004, Edited by: M. Pignataro, J. Rondal, and V. Gioncu, Rome, Italy, 2004, pp , ISBN (HB) Csébfalvi, A. (2010), Optimisation of Stability-Constrained Geometrically Nonlinear Shallow Trusses using a Higher Order Path-Following Method. In: B H V Topping J M Adam F J Pallarés R Bru M L Romero (szerk.), Proceedings of the Tenth International Conference on Computational Structures Technology, Civil-Comp Press, Stirlingshire, UK. Valencia, Spanyolország, Stirling: pp Paper 154. (ISBN: ) Teljes dokumentum a kiadónál DOI: /ccp
, Nonlinear path-following method for computing equilibrium curve of structures, Annals of Operation Research 81, Csébfalvi, A. (2000), Discrete optimization of shallow trusses with stability constraints, in: D. Camotim, D. Dubina, J. Rondal, eds., Proceedings of Third International Conference on Coupled Instabilities in Metal Structures (CIMS’2000), September 21-23, 2000, Lisbon, Portugal, 2000, pp ISBN Csébfalvi A. (2004), Discrete Optimal Design of Space Trusses with Plastic Collapse Constraints, Proceedings of CIMS ’04, Fourth International Conference on Coupled Instabilities in Metal Structures, September, 2004, Edited by: M. Pignataro, J. Rondal, and V. Gioncu, Rome, Italy, 2004, pp , ISBN (HB) Csébfalvi, A. (2010), Optimisation of Stability-Constrained Geometrically Nonlinear Shallow Trusses using a Higher Order Path-Following Method. In: B H V Topping J M Adam F J Pallarés R Bru M L Romero (szerk.), Proceedings of the Tenth International Conference on Computational Structures Technology, Civil-Comp Press, Stirlingshire, UK. Valencia, Spanyolország, Stirling: pp Paper 154. (ISBN: ) Teljes dokumentum a kiadónál DOI: /ccp")
19
HEURISZTIKUS MÓDSZEREK
A megoldandó optimalizálási feladat nemlineáris és nemkonvex természete, implicit jellege, a változók nagy száma és eltérő típusa az egzakt megoldási módszerek alkalmazhatóságát, a szerkezet adekvát leírását veszélyeztető egyszerűsítések, illetve elhanyagolások nélkül, lényegében az egy-két változóval leírható, analitikus eszközökkel kezelhető "szemléltető példák" témakörére szűkíti. A legnehezebb problémát az jelenti, hogy a szerkezeti választ leíró változók jelentős része (például: a merevségi mátrix sajátértékei, az elemcsoportok feszültsége) a tervezési változók implicit függvénye, vagyis ahhoz, hogy a szerkezeti választ megismerjük, meg kell oldanunk a tervezési változóknak megfelelő pontban egy potenciális energiára vonatkozó szélsőérték-feladatot.
 a tervezési változók implicit függvénye, vagyis ahhoz, hogy a szerkezeti választ megismerjük, meg kell oldanunk a tervezési változóknak megfelelő pontban egy potenciális energiára vonatkozó szélsőérték-feladatot.")
20
HEURISZTIKUS MÓDSZEREK
A probléma "szélsőérték-feladat a szélsőérték-feladatban" jellege a potenciális megoldási lehetőségek körét erősen leszűkíti. A közel azonos súlyú szerkezetek megvalósíthatóságának variabilitása - a lokális optimumok sokasága - az egzakt megoldás - a globális optimum - megtalálását erősen kétségessé teszi. Szemléltetésképpen, egy olyan eljárást mutatunk be, amely alkalmas a szerkezet minimális súlyának egzakt meghatározására feltételezve, hogy az elemcsoportok lehetséges keresztmetszeti értékeit egy rögzített diszkrét elemeket tartalmazó katalógusból választjuk és a szerkezet megengedhető viselkedését a szokásos módon, a csomóponti elmozdulásokra, illetve az elemek feszültségére vonatkozó korlátokkal írjuk le.

22
HEURISZTIKUS MÓDSZEREK
Az előzőek alapján könnyen belátható, hogy általános esetben csak heurisztikus módszereket alkalmazhatunk azokra a szerkezetoptimalizálási feladatotokra, amikor a szerkezet súlyát a keresztmetszeti és geometriai változókra, a csomóponti elmozdulásokra, az elemi feszültségekre, illetve magának a szerkezetnek a globális stabilitására felírt feltételek figyelembe vételével minimalizáljuk, egy meghatározott terhelési eset (egyedüli-többszörös, álló-mozgó) feltételezésével. A heurisztikus keresési eljárások szakirodalma ma már rendkívül széleskörű. Az adott területen a fejlődés dinamikája figyelemre méltó, vagyis a megfelelő módszer kiválasztása elméletileg nem jelent problémát. Az igazi nehézséget az okozza, hogy a szakirodalomban fellelhető heurisztikák alapesetként csak a feltétel nélküli explicit szélsőérték-feladatok megoldását támogatják.
 feltételezésével. A heurisztikus keresési eljárások szakirodalma ma már rendkívül széleskörű. Az adott területen a fejlődés dinamikája figyelemre méltó, vagyis a megfelelő módszer kiválasztása elméletileg nem jelent problémát. Az igazi nehézséget az okozza, hogy a szakirodalomban fellelhető heurisztikák alapesetként csak a feltétel nélküli explicit szélsőérték-feladatok megoldását támogatják.")
23
HEURISZTIKUS MÓDSZEREK
A megengedett maximális teherintenzitás teljes mértékben kiküszöböli a hagyományos pontszerű megközelítések esetében a távolság fogalmában megjelenő büntető függvények súlyozásából adódó, elméletileg is vitatható, "miért pont annyi" jellegű szubjektív elemeket, ami sokszor a különböző módszerekkel kapott "legjobb" megoldások összehasonlítását is lehetetlenné teheti. Ugyanis egy adott módszerrel kapott legjobb megvalósítható eredmény - a módszer specifikus értékelési kritériumok eltérő volta miatt - egy másik módszer értékelési kritériuma szerint megvalósíthatatlannak bizonyulhat.

24
HEURISZTIKUS MÓDSZEREK
Az útkövető szerkezeti modellt feltételező értékelési kritérium kidolgozásakor az alábbi természetes feltevésekkel éltem: Egy megvalósítható szerkezet mindig jobb, mint egy nem megvalósítható szerkezet. Két megvalósítható szerkezet közül a könnyebb a jobb. Két nem megvalósítható szerkezet közül az a jobb, amelynek megengedett maximális teherintenzitása nagyobb. A keresési tér legnehezebb szerkezete megvalósítható, a legkönnyebb szerkezete viszont nem.

25
HEURISZTIKUS MÓDSZEREK
A jóság mérőszámát az alábbi kifejezés alapján határoztuk meg: ahol az útkövető módszer alkalmazásából adódó teherintenzitási paraméter, mint a szerkezet megvalósíthatóságának a “természetes” mérőszáma. A feltevésekből azonnal következik, hogy a keresés célja egy olyan megvalósítható szerkezet, amelynek súlya a lehető legjobban megközelíti a keresési térben található legkönnyebb szerkezet súlyát.

26
2A. TÉZIS A megoldandó optimalizálási feladat implicit jellege az egzakt módszerek alkalmazhatóságát, a szerkezet adekvát leírását veszélyeztető egyszerűsítések, illetve elhanyagolások nélkül, lényegében az egy-két változóval leírható, analitikus eszközökkel kezelhető "szemléltető példák" témakörére szűkíti. Nagyobb méretű feladatok esetében csak akkor számolhatunk az egzakt megoldás lehetőségével, ha a feladat speciális természete ezt lehetővé teszi. Bebizonyítottam, hogy ha a szerkezeti válasz csak diszkrét tervezési változók függvénye, akkor egy implicit leszámláláson alapuló eljárás egzakt megoldást eredményez.

27
2B. TÉZIS Általános esetben az implicit optimalizálási probléma megoldására valamilyen heurisztikus keresési módszert kell alkalmaznunk, amely képes a keresési tér részletes feltérképezésére, az elfogadható megoldások reményével kecsegtető részhalmazok kiválasztására, illetve a kiválasztott részhalmazokon belül egy céltudatos keresési technikával a megoldások minőségének javítására, vagyis diverzifikációra és intenzifikációra.

28
2C. TÉZIS Ahhoz, hogy egy feltételes szélsőérték-feladatot egy heurisztikus keresési módszerrel meg tudjunk oldani, a feladatot vissza kell vezetnünk egy feltétel nélküli szélsőérték-feladatra, vagyis az eredeti célfüggvényt egy olyan célfüggvénnyel kell helyettesítenünk, ami az eredeti optimalizálási kritérium mellet, valamilyen formában a megoldás megvalósíthatóságának mértékét is tükrözi.

29
2D. TÉZIS A megvalósíthatóság mérése a hagyományos szerkezeti modellek esetében komoly módszertani nehézségeket okoz. Az útkövető módszerek esetében a megvalósíthatóság mérésére automatikusan adódik egy természetes megoldás, mivel a stabilitásvesztés, illetve a szerkezet viselkedését leíró korlátok megsértése nélkül elérhető maximális teherintenzitás a megvalósíthatóság természetes mérőszáma. Az értékelési kritérium analitikus alakját a tézishez fűzött magyarázatok keretében mutatjuk be. A tézisben csak azt a tényt emelnénk ki, hogy a keresési térben a legkönnyebb és legnehezebb szerkezet súlyának meghatározása kizárólag akkor triviális feladat, ha a szerkezeti modellben csak keresztmetszeti változók szerepelnek. Geometriai változók esetében a legkönnyebb (legnehezebb) szerkezet súlyának meghatározása egy-egy szélsőérték-feladat megoldását igényli.
 szerkezet súlyának meghatározása egy-egy szélsőérték-feladat megoldását igényli.")
30
IRODALMI HIVATKOZÁSOK
Csébfalvi A. (2009), A Hybrid Meta-Heuristic Method for Continuous Engineering Optimization, Periodica Polytechnica Ser. Civ. Eng. (ISSN: ) 53:(2) pp (2009) DOI: /pp.ci Csébfalvi A. (2009), A hybrid metaheuristic for continuous truss geometry and topology optimization, Book of abstracts and CD-ROM Proceedings of the 8th World Congress of Structural and Multidisciplinary Optimization (WCSMO-8), LNEC, Lisboa, Portugal, 1-5 June, 2009, WCSM0-9 Official Agency, p.126, paper ID:1349, ISBN CD ROM pp. 1-10, ISBN /09 99. Csébfalvi, A. (2010), Optimisation of Stability-Constrained Geometrically Nonlinear Shallow Trusses using a Higher Order Path-Following Method. In: B H V Topping J M Adam F J Pallar és R Bru M L Romero (szerk.), Proceedings of the Tenth International Conference on Computational Structures Technology, Civil-Comp Press, Stirlingshire, UK. Valencia, Spanyolország, Stirling: pp Paper 154. (ISBN: ) Teljes dokumentum a kiadónál DOI: /ccp
, A Hybrid Meta-Heuristic Method for Continuous Engineering Optimization, Periodica Polytechnica Ser. Civ. Eng. (ISSN: ) 53:(2) pp (2009) DOI: /pp.ci Csébfalvi A. (2009), A hybrid metaheuristic for continuous truss geometry and topology optimization, Book of abstracts and CD-ROM Proceedings of the 8th World Congress of Structural and Multidisciplinary Optimization (WCSMO-8), LNEC, Lisboa, Portugal, 1-5 June, 2009, WCSM0-9 Official Agency, p.126, paper ID:1349, ISBN CD ROM pp. 1-10, ISBN / Csébfalvi, A. (2010), Optimisation of Stability-Constrained Geometrically Nonlinear Shallow Trusses using a Higher Order Path-Following Method. In: B H V Topping J M Adam F J Pallar és R Bru M L Romero (szerk.), Proceedings of the Tenth International Conference on Computational Structures Technology, Civil-Comp Press, Stirlingshire, UK. Valencia, Spanyolország, Stirling: pp Paper 154. (ISBN: ) Teljes dokumentum a kiadónál DOI: /ccp")
31
IRODALMI HIVATKOZÁSOK
Csébfalvi, A. (2000), Discrete optimization of shallow trusses with stability constraints, in: D. Camotim, D. Dubina, J. Rondal, eds., Proceedings of Third International Conference on Coupled Instabilities in Metal Structures (CIMS’2000), September 21-23, 2000, Lisbon, Portugal, 2000, pp ISBN Csébfalvi A. (2004), Probabilistic Diversification and Intensification in Local Search for Optimal Design of Shallow Space Trusses, 4th European Congress on Computational Methods in Applied Sciences and Engineering, ECCOMAS 2004, P. Neittaanmäki, T. Rossi, K. Majava, and O. Pironneau (eds.) I. Lasiecka (assoc. ed.), Jyväskylä, 24—28 July, ISBN , 2004 Csébfalvi A. (2007), Optimal Design of Frame Structures with Semi-Rigid Joints, Periodica Polytechnica Ser. Civ. Eng. ISSN , Vol. 51, no. 1, pp (2007) DOI: /pp.ci Csébfalvi A. (2007), An ANGEL Method for Discrete Optimization Problems, In: Periodica Polytechnica Ser. Civ. Eng. ISSN , Vol. 51, no. 2, pp (2007) DOI: /pp.ci
, Discrete optimization of shallow trusses with stability constraints, in: D. Camotim, D. Dubina, J. Rondal, eds., Proceedings of Third International Conference on Coupled Instabilities in Metal Structures (CIMS’2000), September 21-23, 2000, Lisbon, Portugal, 2000, pp ISBN Csébfalvi A. (2004), Probabilistic Diversification and Intensification in Local Search for Optimal Design of Shallow Space Trusses, 4th European Congress on Computational Methods in Applied Sciences and Engineering, ECCOMAS 2004, P. Neittaanmäki, T. Rossi, K. Majava, and O. Pironneau (eds.) I. Lasiecka (assoc. ed.), Jyväskylä, 24—28 July, ISBN , Csébfalvi A. (2007), Optimal Design of Frame Structures with Semi-Rigid Joints, Periodica Polytechnica Ser. Civ. Eng. ISSN , Vol. 51, no. 1, pp (2007) DOI: /pp.ci Csébfalvi A. (2007), An ANGEL Method for Discrete Optimization Problems, In: Periodica Polytechnica Ser. Civ. Eng. ISSN , Vol. 51, no. 2, pp (2007) DOI: /pp.ci")
32
AZ ANGEL ALGORITMUS Az előzőekben ismertetett kutatási eredmények, illetve tézisek alapján az alábbi megállapításokra juthatunk: Az útkövető szerkezeti modell, mint az optimalizálási probléma magja, a hagyományos szerkezeti modellekhez képest nagyobb számításigénye miatt, fokozott minőségi követelményeket támaszt az optimalizálási eljárással, mint keretrendszerrel szemben, vagyis bizonyíthatóan hatékony, "optimális" optimalizálási eljárást igényel. Itt optimalizálási eljárás alatt természetesen hatékony keresési heurisztikát értünk. A bemutatásra kerülő ANGEL hibrid heurisztika hatékonyan kezeli mindkét korábban felvetett problémát.

33
AZ ANGEL ALGORITMUS Az ANGEL algoritmus a keresési tér pontjait az ( X, W, F ) elemekkel jellemzi, ahol X a tervezési (keresztmetszeti, illetve geometriai) változók vektora, W a szerkezet súlya, F pedig a szerkezet jóságát jelöli. Az ANGEL algoritmust folyamatábrájával szemléltetjük. A tervezési tér generációkba, illetve azon belül populációkba szervezett pontjai alkotják a keresési eljárás alapelemeit. Az első generációt a tervezési változók jellegének figyelembevételével, egy véletlen szerűen generált populáció alkotja. A második generációtól fölfelé a hangyaboly, illetve a genetikus eljárások váltogatják egymást, egy helyi keresési eljárással kiegészítve, amely a heurisztikus elemekkel kapott megoldások jóságát egy determinisztikus elemekből álló algoritmussal javítja.
 elemekkel jellemzi, ahol X a tervezési (keresztmetszeti, illetve geometriai) változók vektora, W a szerkezet súlya, F pedig a szerkezet jóságát jelöli. Az ANGEL algoritmust folyamatábrájával szemléltetjük. A tervezési tér generációkba, illetve azon belül populációkba szervezett pontjai alkotják a keresési eljárás alapelemeit. Az első generációt a tervezési változók jellegének figyelembevételével, egy véletlen szerűen generált populáció alkotja. A második generációtól fölfelé a hangyaboly, illetve a genetikus eljárások váltogatják egymást, egy helyi keresési eljárással kiegészítve, amely a heurisztikus elemekkel kapott megoldások jóságát egy determinisztikus elemekből álló algoritmussal javítja.")
34
RANDOM POPULATION

35
ANT COLONY OPTIMIZATION

36
GENETIC ALGORITHM

37
AZ ANGEL ALGORITMUS Az eljárás mindig az adott populáció legrosszabb elemét cseréli ki egy jobb elemre, ha a keresés során egy ilyet talál az előző tézisben definiált jóság (F ) kritériumának megfelelően. Az ANGEL módszer három sztochasztikus operátort használ a keresési tér bejárására: kiválasztás, módosulás, és keresztezés
 kritériumának megfelelően. Az ANGEL módszer három sztochasztikus operátort használ a keresési tér bejárására: kiválasztás, módosulás, és. keresztezés.")
38
AZ ANGEL ALGORITMUS A normális eloszlást feltételező módosulás és keresztezés operátorok a közismert diszkrét inverz módszeren alapuló kiválasztás operátor segítségével választják ki a “többé-kevésbé” jó megoldásokat az adott populációból. Minél jobb egy adott megoldás, annál nagyobb a valószínűsége annak, hogy a kiválasztás operátora által kiválasztásra kerül. A folytonos inverz módszeren alapuló módosulás operátor egy új megoldást generál a kiválasztás operátor által kiválasztott régi megoldásból. A módosulás operátor lényege egyszerű: a kiválasztott tervezési változót egy normál eloszlású valószínűségi változó várható értékének tekintjük, ahol a változó szórása a generáció szám monoton csökkenő függvénye. A módosulás operátor a módosuló értéket az így adódó eloszlásból véletlenszerűen generálja.

39
A DISZKRÉT INVERZ MÓDSZER

40
A FOLYTONOS INVERZ MÓDSZEREN ALAPULÓ MÓDOSULÁS OPERÁTOR

41
A FOLYTONOS INVERZ MÓDSZEREN ALAPULÓ KERESZTEZÉS OPERÁTOR

42
AZ ANGEL ALGORITMUS A folytonos inverz módszeren alapuló keresztezés operátor a kiválasztott szülők eloszlásából súlyozással adódó kombinált eloszlásból generál utód (gyerek) megoldást. A súlyozás lényegéből adódóan minél jobb egy szülő, annál nagyobb a súlya a kombinált eloszlásban. A módosuláshoz hasonlóan a keresztezést is a szórás vezérli. Minél nagyobb a szórás értéke, annál nagyobb a változékonysága a keresési eljárásnak. Az eljárás során a változékonyság mértéke a generáció szám függvényében lépésről lépésre csökken, vagyis a keresés egyre szűkebb területekre korlátozódik. A következő ábrákon egy folytonos keresztmetszeti változókkal jellemzett, lapos, stabilitásvesztésre hajlamos szerkezet optimalizálása során kapott legjobb eredményt mutatjuk be 100 elemű populációra és 10 generációra.
 megoldást. A súlyozás lényegéből adódóan minél jobb egy szülő, annál nagyobb a súlya a kombinált eloszlásban. A módosuláshoz hasonlóan a keresztezést is a szórás vezérli. Minél nagyobb a szórás értéke, annál nagyobb a változékonysága a keresési eljárásnak. Az eljárás során a változékonyság mértéke a generáció szám függvényében lépésről lépésre csökken, vagyis a keresés egyre szűkebb területekre korlátozódik. A következő ábrákon egy folytonos keresztmetszeti változókkal jellemzett, lapos, stabilitásvesztésre hajlamos szerkezet optimalizálása során kapott legjobb eredményt mutatjuk be 100 elemű populációra és 10 generációra.")
47
3A. TÉZIS Mivel egy adott szerkezet kiértékelésének számítástechnikai időszükséglete nagy, ezért egy többé-kevésbé "vaktában" kereső módszer használhatatlansága azonnal nyilvánvalóvá válik. Vizsgálataim szerint, az adott területen, az "adjon elfogadható megoldást, elfogadható időn belül, akárhányszor" elvnek legjobban megfelelő módszereket a hibrid keresési eljárások területén kell keresnünk. Az elmúlt évek során kifejlesztett ANGEL hibrid heurisztika nevében hordozza az eljárás lényegét, mivel a betűszó a hangyaboly eljárás (ANt colony algorithm), a genetikus algoritmus (GEnetic algorithm), illetve helyi keresés (Local search) angol elnevezésében szereplő betűk ötvözete.
, a genetikus algoritmus (GEnetic algorithm), illetve helyi keresés (Local search) angol elnevezésében szereplő betűk ötvözete.")
48
3B. TÉZIS Az ANGEL módszer bizonyítottan robusztus természetű, vagyis elfogadható időn belül, feladat specifikus beállítások nélkül, képes sorozatban jó minőségű, statisztikai értelemben egymástól alig különböző megoldásokat előállítani. A hangyaboly eljárás és a genetikus algoritmus felváltva és egymást kiegészítve keresik a legjobb megoldást a lehetséges megoldások halmazán. A hibrid heurisztika mindkét fázisát egy hatékony helyi keresési eljárás támogatja, amely a heurisztikus megoldások minőségét a feltételek, illetve a célfüggvény lokális lineáris közelítésén alapuló lineáris programozási feladatok megoldásával javítja. A lokális javítás sorozat eredménye egy jobb megvalósítható, vagy egy kevésbé megvalósíthatatlan megoldás lesz, ahol a jobb megvalósítható kisebb súlyú, a kevésbé megvalósíthatatlan azonos súly mellett, nagyobb teherbíró képességű szerkezetet jelent.

49
3C. TÉZIS A következetes egyszerűsítések, illetve a felesleges elemek elhagyásának eredményeképpen az ANGEL módszer jelenlegi formájában csak három sztochasztikus operátort használ a keresési tér bejárására: kiválasztás, módosulás, és keresztezés. A helyi keresés klasszikus determinisztikus eljárás, ami az első sikertelen javítási kísérlet után azonnal befejeződik. Az ANGEL módszernek összesen három szabad paramétere van: a populáció nagysága, a generációk száma, illetve helyi keresési lépések maximális száma. Az eljárás a keresési spektrum időbeli változását a generáció függvényében írja le. Az eljárásban a széles spektrumú diverzifikációt fokozatosan egy szűkülő spektrumú intenzifikáció váltja fel.

50
IRODALMI HIVATKOZÁSOK
Csébfalvi A. (2007), An ANGEL Method for Discrete Optimization Problems, In: Periodica Polytechnica Ser. Civ. Eng. ISSN , Vol. 51, no. 2, pp (2007) DOI: /pp.ci Csébfalvi A. (2009), A Hybrid Meta-Heuristic Method for Continuous Engineering Optimization, , In: Periodica Polytechnica Ser. Civ. Eng. (ISSN: ) 53:(2) pp (2009) DOI: /pp.ci Csébfalvi A. (2009), A hybrid metaheuristic for continuous truss geometry and topology optimization, Book of abstracts and CD-ROM Proceedings of the 8th World Congress of Structural and Multidisciplinary Optimization (WCSMO-8), LNEC, Lisboa, Portugal, 1-5 June, 2009, WCSM0-9 Official Agency, p.126, paper ID:1349, ISBN CD ROM pp. 1-10, ISBN /09 99.
, An ANGEL Method for Discrete Optimization Problems, In: Periodica Polytechnica Ser. Civ. Eng. ISSN , Vol. 51, no. 2, pp (2007) DOI: /pp.ci Csébfalvi A. (2009), A Hybrid Meta-Heuristic Method for Continuous Engineering Optimization, , In: Periodica Polytechnica Ser. Civ. Eng. (ISSN: ) 53:(2) pp (2009) DOI: /pp.ci Csébfalvi A. (2009), A hybrid metaheuristic for continuous truss geometry and topology optimization, Book of abstracts and CD-ROM Proceedings of the 8th World Congress of Structural and Multidisciplinary Optimization (WCSMO-8), LNEC, Lisboa, Portugal, 1-5 June, 2009, WCSM0-9 Official Agency, p.126, paper ID:1349, ISBN CD ROM pp. 1-10, ISBN /")
51
IRODALMI HIVATKOZÁSOK
Csébfalvi, A. (2010), Optimisation of Stability-Constrained Geometrically Nonlinear Shallow Trusses using a Higher Order Path-Following Method. In: B H V Topping J M Adam F J Pallar és R Bru M L Romero (szerk.), Proceedings of the Tenth International Conference on Computational Structures Technology, Civil-Comp Press, Stirlingshire, UK. Valencia, Spanyolország, Stirling: pp Paper 154. (ISBN: ) Teljes dokumentum a kiadónál DOI: /ccp Csébfalvi, A. (2010), Discrete Sizing and Continuous Shaping Optimisation of Space Trusses using a Hybrid Metaheuristic Method, In: B H V Topping J M Adam F J Pallarés R Bru M L Romero (szerk.), Proceedings of the Tenth International Conference on Computational Structures Technology, Civil-Comp Press, Stirlingshire, UK. Valencia, Spanyolország, Stirling: pp Paper 127. (ISBN: ) Teljes dokumentum a kiadónál DOI: /ccp
, Optimisation of Stability-Constrained Geometrically Nonlinear Shallow Trusses using a Higher Order Path-Following Method. In: B H V Topping J M Adam F J Pallar és R Bru M L Romero (szerk.), Proceedings of the Tenth International Conference on Computational Structures Technology, Civil-Comp Press, Stirlingshire, UK. Valencia, Spanyolország, Stirling: pp Paper 154. (ISBN: ) Teljes dokumentum a kiadónál DOI: /ccp Csébfalvi, A. (2010), Discrete Sizing and Continuous Shaping Optimisation of Space Trusses using a Hybrid Metaheuristic Method, In: B H V Topping J M Adam F J Pallarés R Bru M L Romero (szerk.), Proceedings of the Tenth International Conference on Computational Structures Technology, Civil-Comp Press, Stirlingshire, UK. Valencia, Spanyolország, Stirling: pp Paper 127. (ISBN: ) Teljes dokumentum a kiadónál DOI: /ccp")
52
TOVÁBBLÉPÉSI IRÁNYOK A bemutatott útkövető módszerrel kombinált hibrid heurisztika további, kihívást jelentő és megoldásra váró problémákat vet fel, amelyek a "még gyorsabban, még jobbat, még egyszerűbben" elv köré csoportosíthatók. A megoldásra váró fejlesztési feladatok az alábbi tényeken alapulnak: Az egyik természetes továbblépési lehetőség abból adódik, hogy napjainkban az NP-nehézségű egészértékű szélsőérték-feladatok megoldására szolgáló "state-of-the-art" operációkutatási szoftverek (például: CPLEX) a kisméretű, azaz csupán néhány száz bináris változót tartalmazó feladatokat, az intenzív fejlesztés eredményeképpen, már egy évtizeddel ezelőtt elképzelhetetlen sebességgel képesek megoldani.
 a kisméretű, azaz csupán néhány száz bináris változót tartalmazó feladatokat, az intenzív fejlesztés eredményeképpen, már egy évtizeddel ezelőtt elképzelhetetlen sebességgel képesek megoldani.")
53
TOVÁBBLÉPÉSI IRÁNYOK Következésképpen, a katalógusosból történő keresztmetszet választás, mint tervezési feltétel kezelésekor a linearizált helyi keresési eljárás számára előírható, hogy csak a katalógusban szereplő diszkrét keresztmetszeti értékeken lépdelhet, vagyis egy "ököl szabályon" alapuló helyi kerekítési heurisztika egy egzakt kiválasztási eljárással helyettesíthető. A módosítás természetesen nem befolyásolja a folytonosan változó értékek mozgásterét, vagyis az elemcsoportok keresztmetszetének "lökésszerű" megváltoztatása és a csomópontok folytonos mozgatása időben egyszerre történhet.

54
TOVÁBBLÉPÉSI IRÁNYOK Természetesen, a helyi keresési eljárás minden elemcsoport esetében a katalógusnak csak egy részletét (a kiindulási, a megelőző, illetve rákövetkező elemeket) látja, a csomópontok mozgását pedig a lineáris közelítésből adódó hiba dinamikusan változó becsült értéke korlátozza. Mivel az ördög mindig a részletekben lakozik, így ebben a teljesen világosnak és problémamentesnek tűnő továbblépési lehetőségben is megjelenik, a katalógusban szereplő értékek távolságának képében. Ha a katalógusbeli értékek távolsága nagy, vagyis a katalógus "hézagos", akkor a helyi modell linearizált elemeit kvadratikus elemekkel kell helyettesítenünk, hogy a modell a "távoli" katalógus értékeket elfogadható pontossággal elérje.
 látja, a csomópontok mozgását pedig a lineáris közelítésből adódó hiba dinamikusan változó becsült értéke korlátozza. Mivel az ördög mindig a részletekben lakozik, így ebben a teljesen világosnak és problémamentesnek tűnő továbblépési lehetőségben is megjelenik, a katalógusban szereplő értékek távolságának képében. Ha a katalógusbeli értékek távolsága nagy, vagyis a katalógus hézagos , akkor a helyi modell linearizált elemeit kvadratikus elemekkel kell helyettesítenünk, hogy a modell a távoli katalógus értékeket elfogadható pontossággal elérje.")
55
TOVÁBBLÉPÉSI IRÁNYOK Az alkalmazási területtől függetlenül, a heurisztikus keresési módszerek egyik neuralgikus pontja az un. "állítható paraméterek" száma, illetve a "jó beállítás" mikéntje. Mivel a keresés hatékonyságát a beállítások jelentős mértékben befolyásolhatják, ezért egy nyilvánvaló fejlesztési törekvésnek tűnik az állítható paraméterek számának csökkentése, illetve az automatikus (adaptív) beállítás lehetőségének megteremtése, vagyis a szokásos "előzetes vizsgálatok" körének szűkítése. Megítélésem szerint, az adott területen az előrelépés lehetőségét az adaptivitás növelésében, vagyis a "rejtett" beállítások területén keresnünk.
 beállítás lehetőségének megteremtése, vagyis a szokásos előzetes vizsgálatok körének szűkítése. Megítélésem szerint, az adott területen az előrelépés lehetőségét az adaptivitás növelésében, vagyis a rejtett beállítások területén keresnünk.")
Hasonló előadás










 egy halmaza. Feladatunk: az objektumokat - valamilyen.>")





.>")


