Előadást letölteni
Az előadás letöltése folymat van. Kérjük, várjon

1
2. Koordináta-rendszerek és transzformációk 2.1. Koordináta-rendszerek 2.2. Az egyenes és a sík egyenlete 2.3. Affin transzformációk 2.4. Projektív transzformációk

2
Mire használjuk? Transzformációk a grafikában: [- tárgyak elhelyezése, [- részek összeállítása [ - tárgyak valószerű átalakításai (GM), - a tárgyak képe: vetítés síkra - egyebek
, - a tárgyak képe: vetítés síkra - egyebek.")
3
Milyen transzformációk kellenek? - E 3 –ban és H 3 -ban ( H 3 = E 3 I 3 ) - minden pontnak van transzformáltja, - H 3 H 3 (kölcsönösen egyértelmű) - pontot pont, - egyenes egyenes - sík sík - illeszkedést tartó módon. Ilyenek a kollineációk, (projektív transzformációk)
 - minden pontnak van transzformáltja, - H 3 H 3 (kölcsönösen egyértelmű) - pontot pont, - egyenes egyenes - sík sík - illeszkedést tartó módon. Ilyenek a kollineációk, (projektív transzformációk).")
4
Itt csak nagyvonalú, szemléletes tárgyalás

5
A kollineációk mátrix alakja H 3 pontjai: X = [x 1, x 2, x 3, h] T H 3 ; h = 0|1; X X ; 0; H 3 kollineációi: { M 44 ; det M 44 0}; M M ; 0 X’ = M 44 X = = (m 11 m 12 m 13 m 14 ) (x 1 ) = (m 11 x 1 +m 12 x 2 +m 13 x 3 +m 14 h) = (x 1 ’) |m 21 m 22 m 23 m 24 | |x 2 | |m 21 x 1 +m 22 x 2 +m 23 x 3 +m 24 h| |x 2 ’| |m 31 m 32 m 33 m 34 | |x 3 | |m 31 x 1 +m 32 x 2 +m 33 x 3 +m 34 h| |x 3 ’| (m 41 m 42 m 43 m 44 ) (h ) (m 41 x 1 +m 42 x 2 +m 43 x 3 +m 44 h) (h ’)
![A kollineációk mátrix alakja H 3 pontjai: X = [x 1, x 2, x 3, h] T H 3 ; h = 0|1; X X ; 0; H 3 kollineációi: { M 44 ; det M 44 0}; M M ; 0 X’ = M 44 X = = (m 11 m 12 m 13 m 14 ) (x 1 ) = (m 11 x 1 +m 12 x 2 +m 13 x 3 +m 14 h) = (x 1 ’) |m 21 m 22 m 23 m 24 | |x 2 | |m 21 x 1 +m 22 x 2 +m 23 x 3 +m 24 h| |x 2 ’| |m 31 m 32 m 33 m 34 | |x 3 | |m 31 x 1 +m 32 x 2 +m 33 x 3 +m 34 h| |x 3 ’| (m 41 m 42 m 43 m 44 ) (h ) (m 41 x 1 +m 42 x 2 +m 43 x 3 +m 44 h) (h ’)](http://images.slideplayer.hu/8/2136926/slides/slide_5.jpg "A kollineációk mátrix alakja H 3 pontjai: X = [x 1, x 2, x 3, h] T H 3 ; h = 0|1; X X ; 0; H 3 kollineációi: { M 44 ; det M 44 0}; M M ; 0 X’ = M 44 X = = (m 11 m 12 m 13 m 14 ) (x 1 ) = (m 11 x 1 +m 12 x 2 +m 13 x 3 +m 14 h) = (x 1 ’) |m 21 m 22 m 23 m 24 | |x 2 | |m 21 x 1 +m 22 x 2 +m 23 x 3 +m 24 h| |x 2 ’| |m 31 m 32 m 33 m 34 | |x 3 | |m 31 x 1 +m 32 x 2 +m 33 x 3 +m 34 h| |x 3 ’| (m 41 m 42 m 43 m 44 ) (h ) (m 41 x 1 +m 42 x 2 +m 43 x 3 +m 44 h) (h ’)")
6
E 3 és H 3 kollineációi: csoport E 3 kolline á ci ó i: affin transzformációk, alcsoport, E 3 E 3 és I 3 I 3 H 3 kollineációi: a projektív transzformációk csoportja H 3 H 3, egy – egy é rtelmű leképezés, pont-, egyenes-, s í k- é s illeszked é st tartó H 3 = E 3 I 3 esetleg egy k ö z ö ns é ges s í k I 3 é s akkor I 3 egy k ö z ö ns é ges s í kra

7
2.4. Projektív transzformációk (a grafikában)
")
8
A „valódi” projektív transzformációk { A 44 } { P 44 }; A 44 : E 3 E 3 és I 3 I 3 „valódi” projektív transzformáció: M 44 { A 44 }, ekkor: van olyan (!) : X = [x 1, x 2, x 3, 1] T E 3 X’ = M 44 · X = [ x 1 ’, x 2 ’, x 3 ’, 0] I 3 egy közönséges síkot az ideális síkba az ideális síkot egy közönséges síkba * a transzformáció „eltűnő síkja”
![A „valódi projektív transzformációk { A 44 } { P 44 }; A 44 : E 3 E 3 és I 3 I 3 „valódi projektív transzformáció: M 44 { A 44 }, ekkor: van olyan (!) : X = [x 1, x 2, x 3, 1] T E 3 X’ = M 44 · X = [ x 1 ’, x 2 ’, x 3 ’, 0] I 3 egy közönséges síkot az ideális síkba az ideális síkot egy közönséges síkba * a transzformáció „eltűnő síkja](http://images.slideplayer.hu/8/2136926/slides/slide_8.jpg "A „valódi projektív transzformációk { A 44 } { P 44 }; A 44 : E 3 E 3 és I 3 I 3 „valódi projektív transzformáció: M 44 { A 44 }, ekkor: van olyan (!) : X = [x 1, x 2, x 3, 1] T E 3 X’ = M 44 · X = [ x 1 ’, x 2 ’, x 3 ’, 0] I 3 egy közönséges síkot az ideális síkba az ideális síkot egy közönséges síkba * a transzformáció „eltűnő síkja")
9
A projektív transzformáció mátrix alakja h H 3 egy pontja; P = [p 1, p 2, p 3, h] T ; P P ; 0 egy kollineációja: M 44 ; M M ; 0 P’ = M 44 P = = (m 11 m 12 m 13 m 14 ) (p 1 ) = (m 11 p 1 +m 12 p 2 +m 13 p 3 +m 14 h) = (p 1 ’) |m 21 m 22 m 23 m 24 | |p 2 | |m 21 p 1 +m 22 p 2 +m 23 p 3 +m 24 h| |p 2 ’| m 41 m 42 m 43 m 44 |m 31 m 32 m 33 m 34 | |p 3 | |m 31 p 1 +m 32 p 2 +m 33 p 3 +m 34 h| |p 3 ’| (m 41 m 42 m 43 m 44 ) (h ) (m 41 p 1 +m 42 p 2 +m 43 p 3 +m 44 h) (h ’) h’ = m 41 p 1 + m 42 p 2 + m 43 p 3 + m 44 h = [ m 41, m 42, m 43, m 44 ] [ p 1, p 2, p 3, h ] T h’ = m 41 p 1 + m 42 p 2 + m 43 p 3 + m 44 h; ? = 0 | 0 ? = [ m 41, m 42, m 43, m 44 ] [ p 1, p 2, p 3, h ] T = 0 | 0
![A projektív transzformáció mátrix alakja h H 3 egy pontja; P = [p 1, p 2, p 3, h] T ; P P ; 0 egy kollineációja: M 44 ; M M ; 0 P’ = M 44 P = = (m 11 m 12 m 13 m 14 ) (p 1 ) = (m 11 p 1 +m 12 p 2 +m 13 p 3 +m 14 h) = (p 1 ’) |m 21 m 22 m 23 m 24 | |p 2 | |m 21 p 1 +m 22 p 2 +m 23 p 3 +m 24 h| |p 2 ’| m 41 m 42 m 43 m 44 |m 31 m 32 m 33 m 34 | |p 3 | |m 31 p 1 +m 32 p 2 +m 33 p 3 +m 34 h| |p 3 ’| (m 41 m 42 m 43 m 44 ) (h ) (m 41 p 1 +m 42 p 2 +m 43 p 3 +m 44 h) (h ’) h’ = m 41 p 1 + m 42 p 2 + m 43 p 3 + m 44 h = [ m 41, m 42, m 43, m 44 ] [ p 1, p 2, p 3, h ] T h’ = m 41 p 1 + m 42 p 2 + m 43 p 3 + m 44 h; .](http://images.slideplayer.hu/8/2136926/slides/slide_9.jpg "= 0 | 0 . = [ m 41, m 42, m 43, m 44 ] [ p 1, p 2, p 3, h ] T = 0 | 0.")
10
A projektív transzformáció mátrix alakja h H 3 egy pontja; P = [p 1, p 2, p 3, h] T ; P P ; 0 egy kollineációja: M 44 ; M M ; 0 P’ = M 44 P = = [ p 1 ’, p 2 ’, p 3 ’, h’ ] T h’ = m 41 p 1 + m 42 p 2 + m 43 p 3 + m 44 h = [ m 41, m 42, m 43, m 44 ] [ p 1, p 2, p 3, h ] T h’ = m 41 p 1 + m 42 p 2 + m 43 p 3 + m 44 h; ? = 0 | 0 ? = [ m 41, m 42, m 43, m 44 ] [ p 1, p 2, p 3, h ] T = 0 | 0 P’ [p 1 ’/ h’, p 2 ’/ h’, p 3 ’/ h’, 1], ha h’ 0 = [p 1 ’, p 2 ’, p 3 ’ 0], ideális pont, ha h’ = 0
![A projektív transzformáció mátrix alakja h H 3 egy pontja; P = [p 1, p 2, p 3, h] T ; P P ; 0 egy kollineációja: M 44 ; M M ; 0 P’ = M 44 P = = [ p 1 ’, p 2 ’, p 3 ’, h’ ] T h’ = m 41 p 1 + m 42 p 2 + m 43 p 3 + m 44 h = [ m 41, m 42, m 43, m 44 ] [ p 1, p 2, p 3, h ] T h’ = m 41 p 1 + m 42 p 2 + m 43 p 3 + m 44 h; .](http://images.slideplayer.hu/8/2136926/slides/slide_10.jpg "= 0 | 0 . = [ m 41, m 42, m 43, m 44 ] [ p 1, p 2, p 3, h ] T = 0 | 0 P’ [p 1 ’/ h’, p 2 ’/ h’, p 3 ’/ h’, 1], ha h’ 0 = [p 1 ’, p 2 ’, p 3 ’ 0], ideális pont, ha h’ = 0.")
11
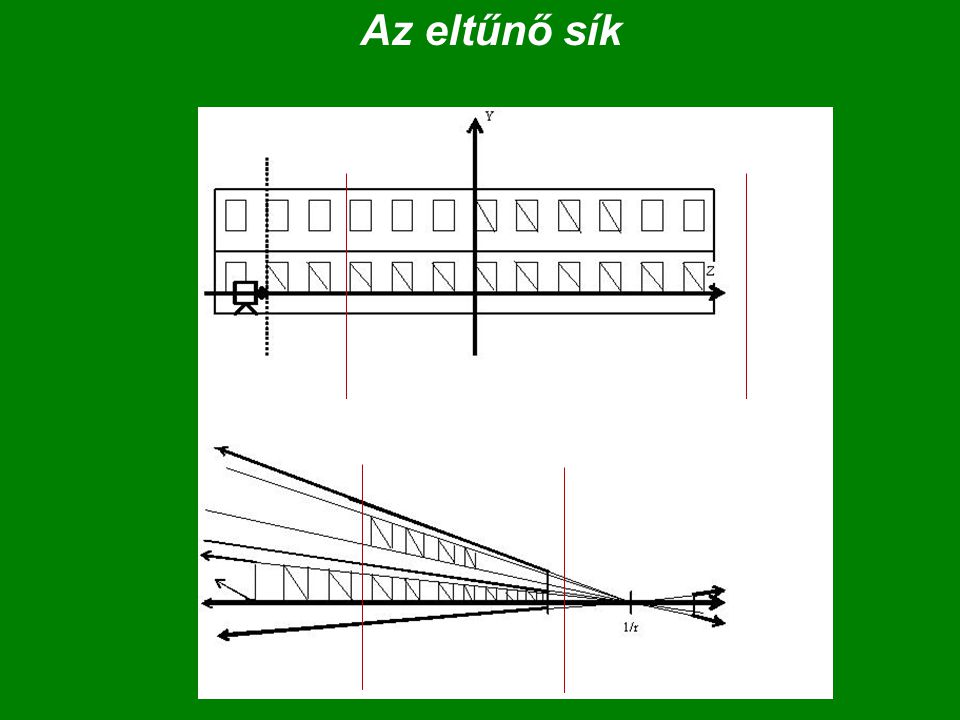
Az eltűnő sík

13
Projektív transzformáció megadása: 5-5 pont H 3 egy projektív transzformációját meghatározza 5 „független” pont és képe. „független”: kifeszítik a teret egyik három sem esik egy egyenesbe. H 2 -ben 4-4

14
A sínpár perspektívája X = [1, 0, 0, 0]; X’ = X Y = [0, 1, 0, 0]; Y’ = Y Z = [0, 0, 1, 0]; Z’ = [0, 0, 1, 1] C = [0, 1, 0, 1]; C’ = [0, 0,1, 0] F = [1, 1, 1, 1]; F’ = [1, 1,0, 1]
![A sínpár perspektívája X = [1, 0, 0, 0]; X’ = X Y = [0, 1, 0, 0]; Y’ = Y Z = [0, 0, 1, 0]; Z’ = [0, 0, 1, 1] C = [0, 1, 0, 1]; C’ = [0, 0,1, 0] F = [1, 1, 1, 1]; F’ = [1, 1,0, 1]](http://images.slideplayer.hu/8/2136926/slides/slide_14.jpg "A sínpár perspektívája X = [1, 0, 0, 0]; X’ = X Y = [0, 1, 0, 0]; Y’ = Y Z = [0, 0, 1, 0]; Z’ = [0, 0, 1, 1] C = [0, 1, 0, 1]; C’ = [0, 0,1, 0] F = [1, 1, 1, 1]; F’ = [1, 1,0, 1]")
15
A projektív transzformáció homogén mátrix alakja P’ [p’ 1, p’ 2, p’ 3, h’] T ; h’ = m 41 p 1 + m 42 p 2 + m 43 p 3 + m 44 h; h’ = [ m 41, m 42, m 43, m 44 ] P ? = 0 | 0 ? [m 41, m 42, m 43, m 44 ] a transzformáció eltűnő síkja. a pontok homogén alakja: P’ P ; 0 a transzformációk homogén alakja: M 44 M 44 ; 0
![A projektív transzformáció homogén mátrix alakja P’ [p’ 1, p’ 2, p’ 3, h’] T ; h’ = m 41 p 1 + m 42 p 2 + m 43 p 3 + m 44 h; h’ = [ m 41, m 42, m 43, m 44 ] P .](http://images.slideplayer.hu/8/2136926/slides/slide_15.jpg "= 0 | 0 . [m 41, m 42, m 43, m 44 ] a transzformáció eltűnő síkja. a pontok homogén alakja: P’ P ; 0 a transzformációk homogén alakja: M 44 M 44 ; 0.")
16
Az eltűnő sík problémája A kamera mögött kezdődő és előtte végződő szakaszok! kamera síkja (z=0) ideális sík kamera elötti (z>0) kamera előtti, 0 < z < 1/r kamera mögötti (z<0) kamera előtti, 1/r < z < + ideális sík z =1/r –be Megoldás: közelsík; a mögöttes elhagyása („vágás”) Távolsík: közelképeknél, vágás mélységben, távolképeknél: t = + (1/t = 0) (a végtelent a 0 ≤ z’ <1/r –re “zsúfolja” be)
 ideális sík kamera elötti (z>0) kamera előtti, 0 < z < 1/r kamera mögötti (z<0) kamera előtti, 1/r < z < + ideális sík z =1/r –be Megoldás: közelsík; a mögöttes elhagyása („vágás ) Távolsík: közelképeknél, vágás mélységben, távolképeknél: t = + (1/t = 0) (a végtelent a 0 ≤ z’ <1/r –re zsúfolja be).")
17
A sínpár perspektívája X = [1, 0, 0, 0]; X’ = X Y = [0, 1, 0, 0]; Y’ = Y Z = [0, 0, 1, 0]; Z’ = [0, 0, 1, 1] C = [0, 1, 0, 1]; C’ = [0, 0,1, 0] F = [1, 1, 1, 1]; F’ = [1, 1,0, 1]
![A sínpár perspektívája X = [1, 0, 0, 0]; X’ = X Y = [0, 1, 0, 0]; Y’ = Y Z = [0, 0, 1, 0]; Z’ = [0, 0, 1, 1] C = [0, 1, 0, 1]; C’ = [0, 0,1, 0] F = [1, 1, 1, 1]; F’ = [1, 1,0, 1]](http://images.slideplayer.hu/8/2136926/slides/slide_17.jpg "A sínpár perspektívája X = [1, 0, 0, 0]; X’ = X Y = [0, 1, 0, 0]; Y’ = Y Z = [0, 0, 1, 0]; Z’ = [0, 0, 1, 1] C = [0, 1, 0, 1]; C’ = [0, 0,1, 0] F = [1, 1, 1, 1]; F’ = [1, 1,0, 1]")
18
„elemi” projektív mátrixok M P 1 P 2 M = ( m m m m ); | m m m m | | m m m m | ( p p p p ) P 1 = ( 1 0 0 0 ) P 2 = ( 1 0 0 0 ) | 0 1 0 0 | | 0 1 0 0 | | 0 0 1 0 | | 0 0 0 1 | ( 0 0 r 1 ) ( 0 0 r 0 ) Kollineációk megadása egyszerű, szemléletes geometriai transzformációk egymásutánjával
; | m m m m | | m m m m | ( p p p p ) P 1 = ( ) P 2 = ( ) | | | | | | | | ( 0 0 r 1 ) ( 0 0 r 0 ) Kollineációk megadása egyszerű, szemléletes geometriai transzformációk egymásutánjával")
19
Összefoglalás X’= M · X kollineációk Affin transzformációk; M utolsó sora: [0, 0, 0, 1] különben: Projektív transzformációk Affin transzformációk: E n E n és I n I n Eltolás, forgatás, léptékezés, nyírás van bennük Projektív transzformációk: eltűnő sík
![Összefoglalás X’= M · X kollineációk Affin transzformációk; M utolsó sora: [0, 0, 0, 1] különben: Projektív transzformációk Affin transzformációk: E n E n és I n I n Eltolás, forgatás, léptékezés, nyírás van bennük Projektív transzformációk: eltűnő sík](http://images.slideplayer.hu/8/2136926/slides/slide_19.jpg "Összefoglalás X’= M · X kollineációk Affin transzformációk; M utolsó sora: [0, 0, 0, 1] különben: Projektív transzformációk Affin transzformációk: E n E n és I n I n Eltolás, forgatás, léptékezés, nyírás van bennük Projektív transzformációk: eltűnő sík")
Hasonló előadás