Előadást letölteni
Az előadás letöltése folymat van. Kérjük, várjon

1
Welcome Copyright by SIEMENS AG 2007 SIMOTION V4.1 SP1

2
SIMOTION Oktatási anyag SIMOTION 4.1 SP1 Release 11/2007

3
Page 3Guideline SIMOTION D435 Tartalom Bevezetés Előkészítés SINAMICS konfigurálás Új projekt Csatlakozás a SINAMICS_Integrated -hez Automata konfigurálás Áramellátás beállítások Digitális bemenetek csatlakoztatása A SERVO_02 működtetése a vezérlőpanelen Kézi vezérlési beállítások Automata vezérlési beállítások Üzenetkezelés A SERVO_03 teljes konfigurációja A beállítások letöltése

4
Page 4Guideline SIMOTION D435 Tartalom SIMOTION programozás Új tengely felvétele A Red_Axis és Blue_Axis konfigurációja Kimenetek hozzáadása A Red_Axis működtetése a vezérlőpulton Hibakezelés Globális változók felvétele Geometria hozzáadása A SIMOTION működtetése programmal A SIMOTION program elindítása változókkal MCC diagramok monitoringja Jelkövetés MCC export ST formátumba Symbol browser Szolgáltatások áttekintése IT Diagnosztika

5
Page 5Guideline SIMOTION D435 Előkészítés Hogyan kezdjük Tegyük be az üres 512 MB SIMOTION V4.1 CompactFlash kártyát Csatlakoztassuk a SIMOTION D435 –t PROFIBUS DP, PROFINET IO with IRT, MPI vagy Ethernet hálózathoz Kapcsoljuk be a főkapcsolót Indítsuk el a SIMOTION SCOUT V4.1 szoftvert. 512 MB CF card Status LED

6
Page 6Guideline SIMOTION D435 SIMOTION D435 Új projekt készítése

7
Page 7Guideline SIMOTION D435 Új hardware elem, amely egyesíti a SIMOTION és a SINAMICS funkcióit. SIMOTION D435 beszúrható a SCOUT új eszközként, miután új projektet hoztunk létre. Kiválasztandó a CPU type D435 V4.1 Kiválasztandó a SINAMICS S120 Integrated V2.5 in D435 Új eszköz hozzáadása double click

8
Page 8Guideline SIMOTION D435 Az interface legyen D435. Az ethernet interface kábel az alsó D435 (-X130, IE2/NET) bemenetbe csatlakoztatható. D435 megjelenik a projekt listán és a HW Config dialógus ablak megnyílik. Külső ethernet csatlakozás beállítása Ha nem sikerül csatlakozni, ellenőrizzük a “Set PG/PC interface” és a “Assign PG/PC” beállításokat. A használt PC/PG más interfészt is tartalmazhat
 bemenetbe csatlakoztatható. D435 megjelenik a projekt listán és a HW Config dialógus ablak megnyílik. Külső ethernet csatlakozás beállítása Ha nem sikerül csatlakozni, ellenőrizzük a Set PG/PC interface és a Assign PG/PC beállításokat. A használt PC/PG más interfészt is tartalmazhat.")
9
Page 9Guideline SIMOTION D435 HW konfiguráció Töltsük át a konfigurációt a Module D435-be. Zárjuk be a HW Config ablakot az áttöltés után. Várjuk meg, amíg a SIMOTION D435 újraindul. (zöld LED világít, lásd 5. oldal) check correct address download process Select Target Module Download to Module
 check correct address download process Select Target Module Download to Module.")
10
Page 10Guideline SIMOTION D435 Hozzuk létre a kapcsolatot a PC és a D435 között. Gyári beállítások visszaállítása Kapcsolat a rendszerrel connect Csatlakoztunk a SINAMICS Integrated-hez. Hurrá !

11
Page 11Guideline SIMOTION D435 Klikk a Start automatic configuration gombra Automata konfiguráció double click

12
Page 12Guideline SIMOTION D435 Mindkét hajtás legyen “Servo” típusú OK. Automata beállítás Servo- vagy vector-típusú hajtás kiválasztása Kattintsunk az Identification via LED (azonosítás) ikonra hogy azonosítsuk az áramellátó egységet Klikk az Ok gombra.
 ikonra hogy azonosítsuk az áramellátó egységet Klikk az Ok gombra..")
13
Page 13Guideline SIMOTION D435 Feszültség beállítások Nyissuk meg az Expert list for SERVO_02 and SERVO_03 Legyen p210 = 400 V Legyen p1244[0] = 715 V and p1248[0] = 279 V set p210 = 400V Gépeljük a számot itt a gyors elérésért. set p1244[0] = 715 V set p1248[0] = 279 V right click Ablak bezár. right click
![Page 13Guideline SIMOTION D435 Feszültség beállítások Nyissuk meg az Expert list for SERVO_02 and SERVO_03 Legyen p210 = 400 V Legyen p1244[0] = 715 V and p1248[0] = 279 V set p210 = 400V Gépeljük a számot itt a gyors elérésért.](http://images.slideplayer.hu/40/11168885/slides/slide_13.jpg "set p1244[0] = 715 V set p1248[0] = 279 V right click Ablak bezár. right click.")
14
Page 14Guideline SIMOTION D435 Csatlakoztassuk a DI0 digitális bemenetet(P864 Infeed Operation) Csatlakoztassuk a digitális bemenetet 0 ( 1 ) A beállítás a SERVO_02 –re vonatkozik ( 2 ) A “p864, BI : Infeed operation” jel ( 3 ) hozzárendelődött 2. 3. Digitális I/O beállítások double click 1.

15
Page 15Guideline SIMOTION D435 Kapcsoljuk be a SERVO_02 a SIEMENS kontrol panelen Kapcsoljuk fel a 0 (DI 0) -t Eredmény: Infeed operation enabled Teszt beállítás a külső panelhez
 -t Eredmény: Infeed operation enabled Teszt beállítás a külső panelhez")
16
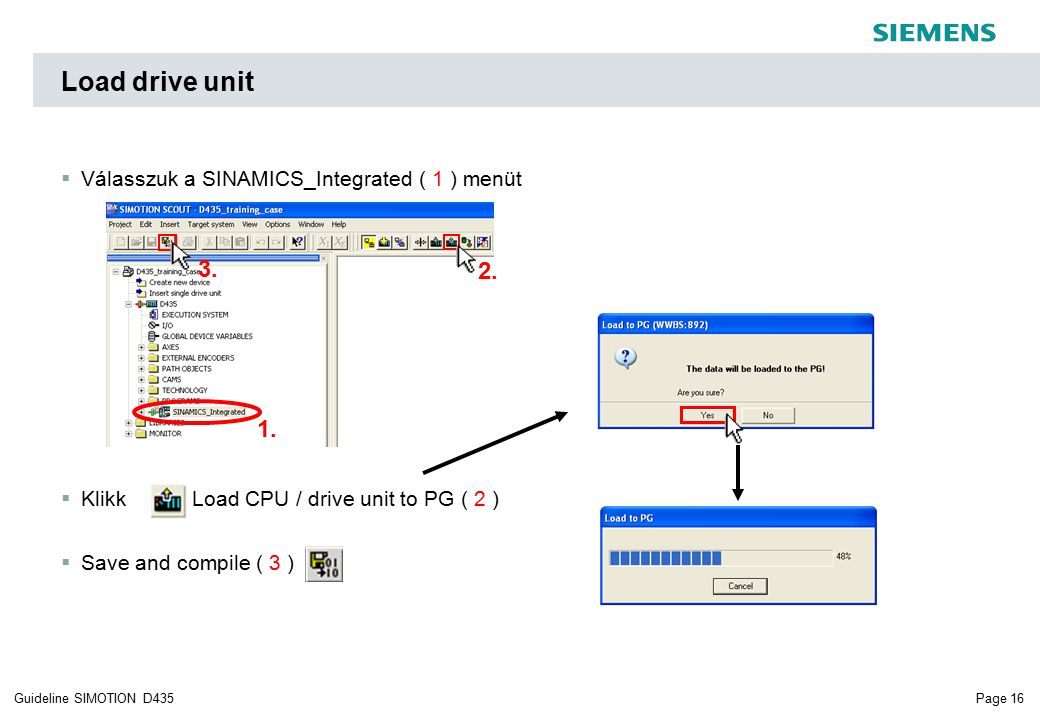
Page 16Guideline SIMOTION D435 Válasszuk a SINAMICS_Integrated ( 1 ) menüt Klikk Load CPU / drive unit to PG ( 2 ) Save and compile ( 3 ) Load drive unit 3. 2. 1.
17
Page 17Guideline SIMOTION D435 A vezérlési prioritások legyenek SERVO_02: SINAMICS_Integrated Drives SERVO_02 Commissioning Control panel A SERVO_02 működtetése a kontrol panelen double click show diagnostic area

18
Page 18Guideline SIMOTION D435 A vezérlési sorrend Engedélyez ( 1 ) Sebesség ( 2 ) Hajtás bekapcsol ( 3 ) SERVO_02 működtetése a kontrol panelen 1. 2. 3. SERVO_02 is in Operation

19
Page 19Guideline SIMOTION D435 Hajtás kikapcsolása Vezérlési prioritás visszaállítása “Yes” STOP SERVO_02 with the control panel

20
Page 20Guideline SIMOTION D435 A mérőfunkciók dialógus megnyitása ( 1 ) a menu bar-on. Kiválasztjuk a SINAMICS_Integrated ( 2 ) Kiválasztjuk “Speed controller setpoint jump (after speed setpoint filter)” ( 3 ) A mérőfunkciótól függően négy csatornát tudunk megjeleníteni. ( 4 ) 1. 3. 4. Kézi vezérlő beállítások – sebességszabályzó beállítások 2.
 Kiválasztjuk Speed controller setpoint jump (after speed setpoint filter) ( 3 ) A mérőfunkciótól függően négy csatornát tudunk megjeleníteni. ( 4 ) Kézi vezérlő beállítások – sebességszabályzó beállítások 2..")
21
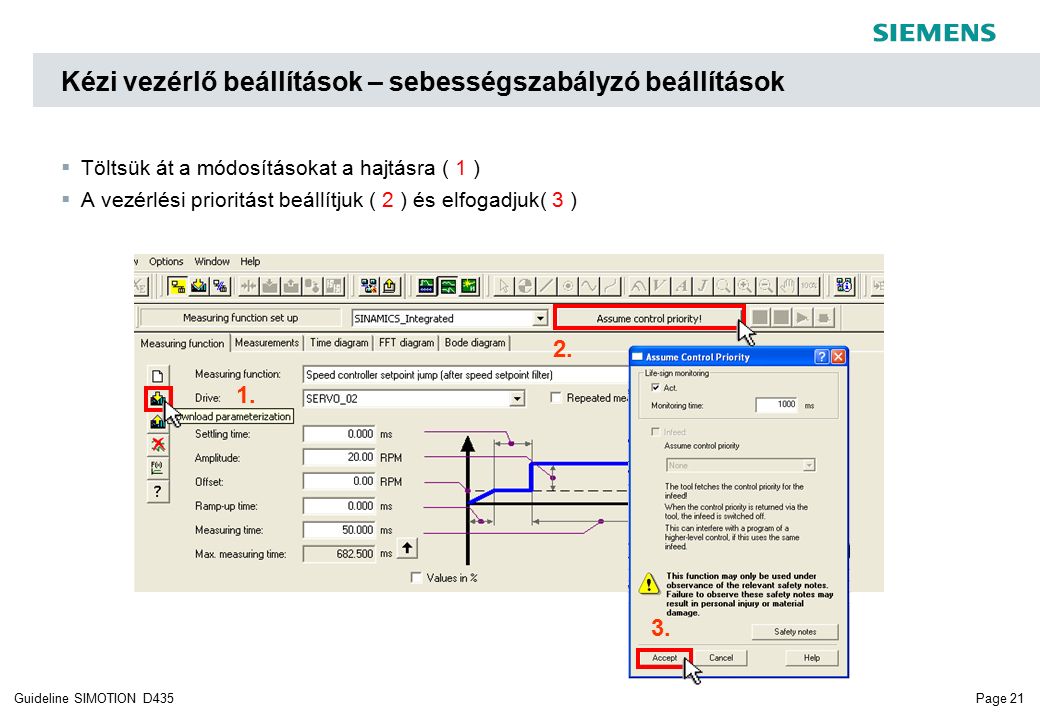
Page 21Guideline SIMOTION D435 Kézi vezérlő beállítások – sebességszabályzó beállítások Töltsük át a módosításokat a hajtásra ( 1 ) A vezérlési prioritást beállítjuk ( 2 ) és elfogadjuk( 3 ) 1. 2. 3.
22
Page 22Guideline SIMOTION D435 1. Hajtást bekapcsoljuk ( 1 ) és a mérést elindítjuk ( 2 ) The measurement will start after the alert has been read and understood ( 3 ) Kézi vezérlő beállítások – mérés elindítása 3. 2.
 és a mérést elindítjuk ( 2 ) The measurement will start after the alert has been read and understood ( 3 ) Kézi vezérlő beállítások – mérés elindítása")
23
Page 23Guideline SIMOTION D435 A megjelenített adatok Hajtás kikapcsl ( 1 ) Vezérlési prioritás visszaállít ( 2 ) Kézi vezérlő beállítások – sebességszabályzó beállítások 2. 1.

24
Page 24Guideline SIMOTION D435 Az erősítési tényező (gain factor) módosítható P gain = 0.1 Nms/rad a ( 2 ) beviteli mezőben a sebességszabályzó template-n ( 1 ) (ENTER) lenyomása után az érték aktív lesz. 2. 1. Kézi vezérlő beállítások – sebességszabályzó beállítások 1. 2.

25
Page 25Guideline SIMOTION D435 Select a new measuring function Press: Assume control priority Accept application monitoring time Switch Drive ON Start measuring function Acknowledge alert with “Yes” Switch Drive OFF Press: Give up control priority! Manual controller setting – Control measurement Measuring function Drive ON/OFF

26
Page 26Guideline SIMOTION D435 A módosított szabályzó értékek jobb válaszokat mutatnak a tranziensek tekintetében. Lezárjuk és nem mentjük el a görbét. Kézi vezérlő beállítások – szabályzési mérés Right click Close

27
Page 27Guideline SIMOTION D435 Automata vezérlő beállítások Az automata vezérlő beállítások érvényesítése után a hajtás kikapcsolandó. 1. 2. 3. 4. Assume control priority, Drive ON and Perform all steps Mindegyik lépés automatikus new values will be calculated To save settings scroll down and press “Accept”.

28
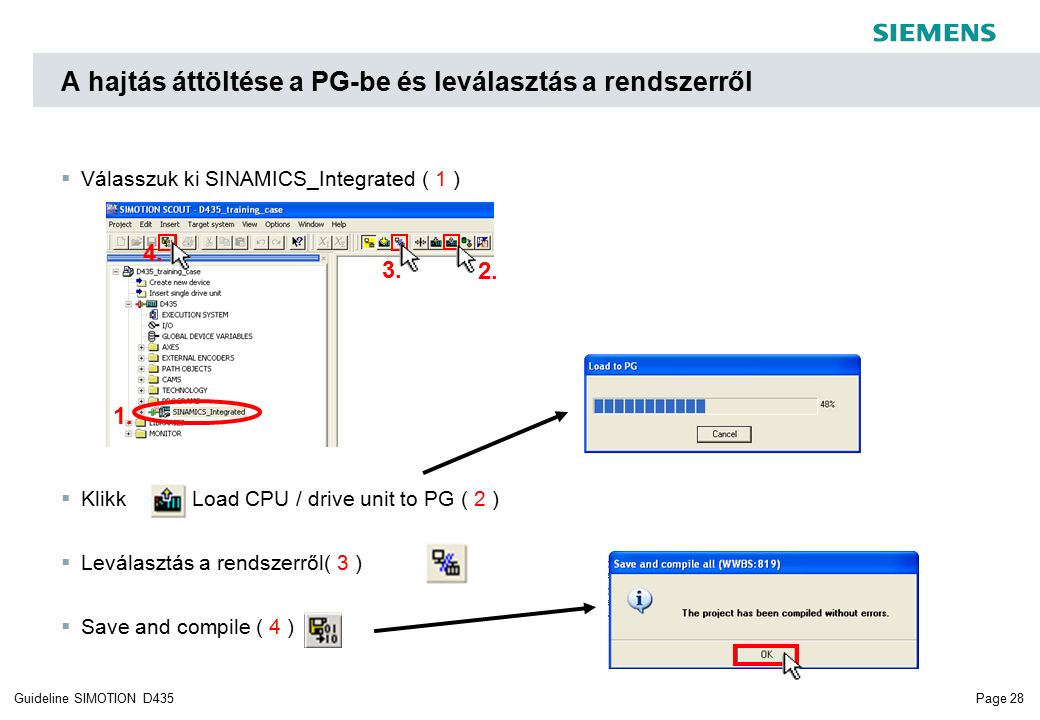
Page 28Guideline SIMOTION D435 Válasszuk ki SINAMICS_Integrated ( 1 ) Klikk Load CPU / drive unit to PG ( 2 ) Leválasztás a rendszerről( 3 ) Save and compile ( 4 ) A hajtás áttöltése a PG-be és leválasztás a rendszerről 4. 2. 3. 1.
29
Page 29Guideline SIMOTION D435 A PROFIBUS HW konfigurációja Válassd a megfelelő message frame type (pl.: SIEMENS telegram 105 for drives, telegram 390 for CU) Transfer configuration to HW Config Before the alignment, you must move all drive objects without I/O addresses (“---..---”) behind the objects with valid or still to be aligned (“???..???”) I/O addresses. Another message frame type is defined in HW Config Message frame has been aligned to HW Config

30
Page 30Guideline SIMOTION D435 1. A SERVO_03 konfiguráció befejezése Kövessük a template beállításokat a “SERVO_03” - hoz. A motor és az encoder nem elektronikus típusú. (Nincs integrált szenzor) 2.
 2..")
31
Page 31Guideline SIMOTION D435 A SERVO_03 vezérlési struktúrájának beállítása 6SL3120-2TE13-0Axx (see label) Állítsuk be a vezérlési struktúráját és a teljesítményt aSERVO_03-hoz.
 Állítsuk be a vezérlési struktúráját és a teljesítményt aSERVO_03-hoz.")
32
Page 32Guideline SIMOTION D435 2. 3. 1. Működtető jel beállítása Állítsuk be a DI 4 jelet, amely majd működteti a SERVO_03-at.

33
Page 33Guideline SIMOTION D435 Az áramellátás beállítása Jelöljük ki a megfelelő csatlakozást a motor modulhoz.

34
Page 34Guideline SIMOTION D435 1. 2. 3. Motor és fék választás A motor típus legyen(1FK7022-xAK7x-xxxx) és a fékbeállítás 3 rd party motor integration
 és a fékbeállítás 3 rd party motor integration.")
35
Page 35Guideline SIMOTION D435 Encoder választás Az encoder legyen (sin/cos incremental encoder, code 2001)
")
36
Page 36Guideline SIMOTION D435 Message frame selection / Summary Control correct SIEMENS telegram 105 for PROFIBUS process data exchange

37
Page 37Guideline SIMOTION D435 A projekt áttöltése a rendszerbe Kilikkeljünk a Save project majd a connect to target system ikonra Válaszzuk a SINAMICS_Integrated és a load project to target system ikont click copy RAM to ROM A SINAMICS_Integrated beállításai futásra készek. Select if project should be saved to CF card.

38
Page 38Guideline SIMOTION D435 Megjegyzés A D435 tréning kofferek némelyike (MLFB: 6SL3120-2TE13-0AA0) hibát jelezhet Ekkor: Megnyitjuk a expert list for SERVO_03 dialógust Legyen p1244[0] = 715 V és p1248[0] = 279 V Klikk Load CPU / drive unit to PG Klikk Save and compile Módisított motor modulok a csomagban
![Page 38Guideline SIMOTION D435 Megjegyzés A D435 tréning kofferek némelyike (MLFB: 6SL3120-2TE13-0AA0) hibát jelezhet Ekkor: Megnyitjuk a expert list for SERVO_03 dialógust Legyen p1244[0] = 715 V és p1248[0] = 279 V Klikk Load CPU / drive unit to PG Klikk Save and compile Módisított motor modulok a csomagban](http://images.slideplayer.hu/40/11168885/slides/slide_38.jpg "Page 38Guideline SIMOTION D435 Megjegyzés A D435 tréning kofferek némelyike (MLFB: 6SL3120-2TE13-0AA0) hibát jelezhet Ekkor: Megnyitjuk a expert list for SERVO_03 dialógust Legyen p1244[0] = 715 V és p1248[0] = 279 V Klikk Load CPU / drive unit to PG Klikk Save and compile Módisított motor modulok a csomagban")
39
Page 39Guideline SIMOTION D435 Dupla klikk az “Insert axis” elemen Két tengelyt fogunk felvenni (“Red_Axis“ és “Blue_Axis”) SIMOTION D435 – Új tengelyek felvétele double click Információ : Piros jelzés The A Piros jelzés az optimális SINAMICS értékeket jelzi. A “Load to PG” frissíti ezeket.

40
Page 40Guideline SIMOTION D435 Legyen a tengely neve “Red_Axis” és jelöljük ki a szükséges technológiai tulajdonságokat Legyen a tengely forgó (rotary axis) A “Red_Axis“ beállításai
 A Red_Axis beállításai")
41
Page 41Guideline SIMOTION D435 A “Red_Axis“ beállításai Definiáljuk a mértékegységeket és válasszuk a “modulo axis” 360° modulo length értékkel.

42
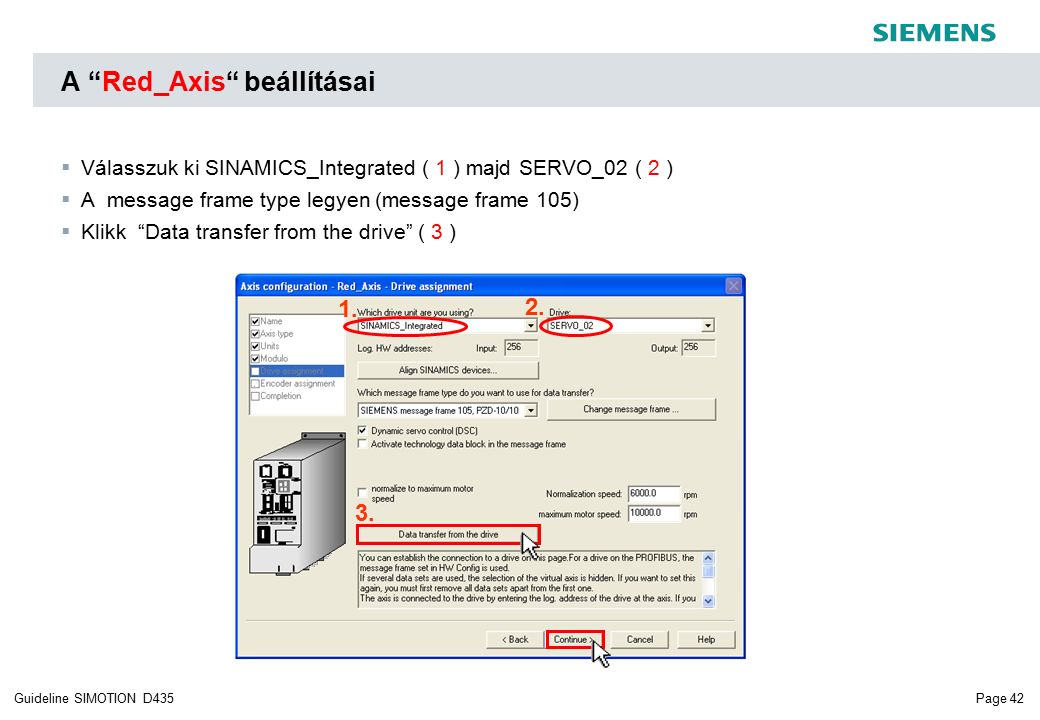
Page 42Guideline SIMOTION D435 A “Red_Axis“ beállításai Válasszuk ki SINAMICS_Integrated ( 1 ) majd SERVO_02 ( 2 ) A message frame type legyen (message frame 105) Klikk “Data transfer from the drive” ( 3 ) 1. 2. 3.
43
Page 43Guideline SIMOTION D435 A “Red_Axis“ beállításai Klikk “Data transfer from the drive”, amely megnyitja encoder dialógust Encoder type: Absolute encoder, cyclic absolute Encoder mode: Endat Measuring system: Rotary encoder system Encoder pulses / revolution: 512 Fine resolution: 2048 Number of data bits: 21

44
Page 44Guideline SIMOTION D435 Tengely beállítások összefoglalása A “Red_Axis“ beállításai

45
Page 45Guideline SIMOTION D435 A második tengely felvétele : “Blue_Axis” A beállítások az előzőkhöz hasonlóak, lásd (“Red_Axis”) beállításai. -Klikk “Insert axis” a név legyen : “Blue_Axis” -Technológia választás: “Synchronous operation” -Tengely típus: rotary; modulo axis és 360 degrees modulo length

46
Page 46Guideline SIMOTION D435 A “Blue_Axis” beállításai Klikk “Data transfer from the drive”, amely megnyitja encoder dialógust Encoder pulses / revolution: 2048 Encoder type: Incremental encoder Encoder mode: Sine Measuring system: Rotary encoder system

47
Page 47Guideline SIMOTION D435 Output cam hozzáadása a “Red_Axis“-hez Klikk Insert output cam Ablak bezár. standard settings √

48
Page 48Guideline SIMOTION D435 Töltsük le a SIMOTION D435 projektet a cél eszközre (Az első letöltés hosszabb ideig fog tartani) Az adatok áttöltése a rendszerbe Load project to target system
 Az adatok áttöltése a rendszerbe Load project to target system")
49
Page 49Guideline SIMOTION D435 1. 2. 3. 4. A “Red_Axis” működtetése a SIMOTION vezérlőpulttal show diagnostic area

50
Page 50Guideline SIMOTION D435 1. 2. 4. 5. 1.Engedélyezés 2.OK 3.Klikk Show Diagnostics 4.Válaszd speed- controlled traversing of the axis 5.Gépeld be a sebességez és az irányt 6. Mozgás elindít 6. A “Red_Axis” indítása a SIMOTION vezérlőpulttal “Red_Axis“ működik 3.

51
Page 51Guideline SIMOTION D435 1. 2. 3. 1.Mozgás leáll 2.Engedélyek törlése 3.OK Hiba (no PLC control) Jelentés elfogad 4.Klikk ‘Give up control priority’ Megj: A Blue_Axis is hasonlóan működtethető. A DI 4 legyen bekapcsolva !. 4. A “Red_Axis” leállítása a SIMOTION vezérlőpulttal
 Jelentés elfogad 4.Klikk ‘Give up control priority’ Megj: A Blue_Axis is hasonlóan működtethető. A DI 4 legyen bekapcsolva !. 4. A Red_Axis leállítása a SIMOTION vezérlőpulttal.")
52
Page 52Guideline SIMOTION D435 Programozás A programozáshoz három lehetőségünk van: 1. Egyéni programozás Kövesd az utasításokat a SIMOTION programozáshoz (időigényes) 2. Saját projekt használata, de a programot a demoprojektből másoljuk Indítsunk másik SCOUT példányt (open SCOUT másodszor is) A másik SCOUT példányban nyisd meg a demo projektet A szükséges programokat másold át a saját pojektbe (Ügyeljünk a nevek helyes megválasztására....) 3. Demo projekt használata Nyissuk meg a demo projektet és kövessük az instrukciós lépéseket less time required
 2. Saját projekt használata, de a programot a demoprojektből másoljuk Indítsunk másik SCOUT példányt (open SCOUT másodszor is) A másik SCOUT példányban nyisd meg a demo projektet A szükséges programokat másold át a saját pojektbe (Ügyeljünk a nevek helyes megválasztására....) 3. Demo projekt használata Nyissuk meg a demo projektet és kövessük az instrukciós lépéseket less time required.")
53
Page 53Guideline SIMOTION D435 Hibakezelés Szúrjunk be egy “faulthandling” nevű ST programot Frodítsuk le az ST programot right click Select “Accept and compile” or press !

54
Page 54Guideline SIMOTION D435 Hibakezelés Nyissuk meg a EXECUTION SYSTEM és adjuk hozzá az ST programot a SystemInterruptTask FaultTaskshoz Add ST program “TechFaultProg” to TechnologicalFaultTask Add ST program “PerFaultProg” to PeripheralFaultTask Double Click on EXECUTION SYSTEM

55
Page 55Guideline SIMOTION D435 Globális változók létrehozása Lecsatlakozunk a rendszerről Megnyitjuk a ‘global device variables’ elemet és létrehozunk két változót: “enable_mcc”;“toggle” global variables enable_mcc with data type: bool toggle with data type: bool

56
Page 56Guideline SIMOTION D435 CAM beszúrása Enter geometry settings for Cam_1 Close Cam_1 to save settings. Klikk Insert cam for MCC program

57
Page 57Guideline SIMOTION D435 1. Insert a MCC unit (MCCUnit_1), uncheck Open editor automatically A SIMOTION működtetése programmal Klikk Insert MCC unit 1. 3. 3. Insert MCC Chart (Motion) 2. Permit single step és program status
, uncheck Open editor automatically A SIMOTION működtetése programmal Klikk Insert MCC unit Insert MCC Chart (Motion) 2. Permit single step és program status.")
58
Page 58Guideline SIMOTION D435 A SIMOTION működtetése programmal Készítsük el a következő folyamatábrát (program “Motion”) -While variable “enable_mcc” = true start MCC -Wait 2 seconds -Switch Red_Axis enable -Start Red_Axis position-controlled, velocity 200°/s -Switch output cam on Red Axis (switch between 10° – 20°) -Wait 5 seconds -Switch Blue_Axis enable -"Cam on" with Blue_Axis and 180° synchronization length -Wait 10 seconds -"Cam off" with Blue_Axis and 180° desynchronization length -Disable Blue_Axis -Stop Red_Axis -Disable Red_Axis -Set variable toggle -Start Motion Task_2 Az alapértelmezett beállításokat használjuk ahol másképp nincs jelölve. Elment és fordít.

59
Page 59Guideline SIMOTION D435 A SIMOTION működtetése programmal Készítsünk egy új MCC folyamatábrát és az ábra szerint (program “loop”) -Start Motion Task_1 Adjunk hozzá LFunit_1” nevű LAD/FBD egységet “ (insert LAD/FBD program and permit program status) Compile and Save programs. Készítsük el az ábra szerint enter variable “tmp” Insert LAD/FBD program “ladfd_1”

60
Page 60Guideline SIMOTION D435 Nyissuk meg a ‘EXECUTION SYSTEM’ Program hozzárendelése “Motion” → Motion Task 1 és “Loop” → Motion Task 2 A task konfigurációnál, kijelölendő az “Activation after Startup task” → Motion Task 1 Program hozzárendelése “LFunit_1” → BackgroundTask Kilépés (EXECUTION SYSTEM) majd elmentés (save new settings). A SIMOTION működtetése programmal

61
Page 61Guideline SIMOTION D435 A SIMOTION program letöltése a rendszerre Save settings and compile Connect to target system Download SIMOTION D435 project to target device copy RAM to ROM if desired

62
Page 62Guideline SIMOTION D435 A SIMOTION MCC program elindítása a globális változóval Nyissuk meg “Global Device Variables” és legyen “ enable_mcc” = true az MCC Chart indításához set true and control immediately

63
Page 63Guideline SIMOTION D435 A SIMOTION MCC chart monitoringja A Monitoring ki/be kapcsolásához válasszuk on/off az MCC-hez Kék státus: lépésenként Sárga státus: monitoring MCC egy lépés MCC monitoring

64
Page 64Guideline SIMOTION D435 SIMOTION LAD/FBD egység monitoringj Program státus engedélyezés (ON/OFF) right click color indicator (blue and green)
 right click color indicator (blue and green)")
65
Page 65Guideline SIMOTION D435 Online jelek nyomkövetése Nyissuk meg a Trace / function generator Válasszuk a D435, Válasszuk a signals (1) Jel kiválasztása (2) Jelek hozzárendelése a csatornához (3) Végtelenített nyomkövetés (4) Parameterizálás letöltése
 Jel kiválasztása (2) Jelek hozzárendelése a csatornához (3) Végtelenített nyomkövetés (4) Parameterizálás letöltése")
66
Page 66Guideline SIMOTION D435 Online jelek nyomkövetése Start trace A tengelyek pozícióinak és az output cam állapotának idődiagrammja stop trace

67
Page 67Guideline SIMOTION D435 Az MCC elmentése és Import ST Exportáljuk az MCC diagramot mint ST source majd Import Save file Import MCC Chart “Loop” as ST Source

68
Page 68Guideline SIMOTION D435 Symbol browser A rendszerváltozókat a symbol browser segítségével használhatjuk pl.: válasszuk a symbol browsert majd a tengelyt all symbols can be monitored online

69
Page 69Guideline SIMOTION D435 Szolgáltatások áttekintése A tengelyek állapotát megfigyelhetjük úgy, hogy a projekt nevén jobbklikk és kiválasztjuk a cél rendszert. right click

70
Page 70Guideline SIMOTION D435 IT DIAG – integrált SIMOTION Diagnosztika Gépeljük be a SIMOTION IP címét a in Webbrowserbe (pl. http://169.254.11.22) Megj: Lehet, hogy az automata konfigurációs szkriptet előtte ki kell iktatnunk

71
Köszönöm a figyelmet !

Hasonló előadás






 Foci VB 2006 Különböző országok taktikái.>")











Auto-indexing enabled b)Auto-indexing disabled c)Nem eldönthető 1.>")
