Előadást letölteni
Az előadás letöltése folymat van. Kérjük, várjon

1
BME Mechatronika, Optika és Műszertechnika Tanszék
MECHATRONIKA ALAPJAI Dr. Huba Antal Dr. Lukács Attila Mester Sándor BME Mechatronika, Optika és Műszertechnika Tanszék

2
Tárgy felépítése, követelményei
Tantárgyi kiírás: 1+3 (E+Gy) A tananyag, ill. hagyományok miatt az órafelépítés lesz Kéthetente kettő óra gyakorlat (első gyakorlat szeptember 12) A félév második felében 2 vagy 3 gyárlátogatás Követelmény: gyárlátogatások beszámolói 1 ZH
 A tananyag, ill. hagyományok miatt az órafelépítés lesz. Kéthetente kettő óra gyakorlat (első gyakorlat szeptember 12) A félév második felében 2 vagy 3 gyárlátogatás. Követelmény: gyárlátogatások beszámolói. 1 ZH.")
3
MECHATRONIKA KIALAKULÁSA Súlyponteltolódás, funkció - átvétel
Elektronika Informatika Gépészet MECHATRONIKA KIALAKULÁSA Kialakulásának oka (1980-as évek): Súlyponteltolódás, funkció - átvétel Szórakoztató elektronika (itt kezdődött) Közlekedés, űrkutatás Automatizálás Mezőgazdaság Építőipar (Japán: aktív rengéscsillapítás) Gyógyászat Lényege Nagyfokú integráció és méretcsökkenés (Napjaink példája a CD fej) Interdiszciplinaritás Hatása A XXI. század új csúcstechnikája: A mikrorendszer-technika (MEMS)
: Súlyponteltolódás, funkció - átvétel. Szórakoztató elektronika (itt kezdődött) Közlekedés, űrkutatás. Automatizálás. Mezőgazdaság. Építőipar (Japán: aktív rengéscsillapítás) Gyógyászat. Lényege. Nagyfokú integráció és méretcsökkenés. (Napjaink példája a CD fej) Interdiszciplinaritás. Hatása. A XXI. század új csúcstechnikája: A mikrorendszer-technika (MEMS)")
4
Mi az a MEMS? Micro Electro-Mechanical Systems
Mikro Elektromechanikai Rendszerek Mechanikai elemek, szenzorok, aktuátorok és elektronika integrációja egy közös rétegben

5
Yasakawa Electric Company (Japán)
Így kezdődött… Yasakawa Electric Company (Japán) Mechatronics® 1969 „Minek nevezzük az új, teljesen automatikus fényképezőgépet?” A mechatronika nem a „semmiből” keletkezett, hanem a gépészet fejlődésének egyenes következménye, hiszen alapvetően mindig az volt a cél, hogy az ember egyre ügyesebb, kisebb és „intelligensebb” berendezéseket hozzon létre, életének és munkájának megkönnyítésére. Napjainkra világossá vált, hogy a mechatronika inkább tekinthető korszerű mérnöki személetmódnak, mint külön tudományágnak, hiszen legalább három tudományterület integrációját jelenti.
 Mechatronics® „Minek nevezzük az új, teljesen automatikus fényképezőgépet A mechatronika nem a „semmiből keletkezett, hanem a gépészet fejlődésének egyenes következménye, hiszen alapvetően mindig az volt a cél, hogy az ember egyre ügyesebb, kisebb és „intelligensebb berendezéseket hozzon létre, életének és munkájának megkönnyítésére. Napjainkra világossá vált, hogy a mechatronika inkább tekinthető korszerű mérnöki személetmódnak, mint külön tudományágnak, hiszen legalább három tudományterület integrációját jelenti.")
6
Isermann: A GÉPÉSZET FEJLŐDÉSE Mechatronics Vol 12.
Gőzgép 1860 Dinamók 1870 Forgó szivattyúk 1880 Belsőégésű motor 1880 Mechanikus írógép < 1900 Tisztán mechanikus rendszerek ◄ Egyenáramú motor 1870 ◄ Váltakozó áramú motor 1889 1920 Hagyományos szerszámgépek Villamos hajtású szivattyúk Mechanikus rendszerek elektromos szabályozással ◄ Relék, tekercsek ◄ Hidraulika, pneumatika ◄ Elektronikus erősítők ◄ PI-kontrollerek 1930 1935 Mechanikus rendszerek automatikus szabályozással Elektromos írógép Gőzturbinák Repülőgép ipar ◄ Tranzisztor 1948 ◄Tirisztor 1955 1955 Mechanikus rendszerek elektronikus (analóg) szabályozással szekvenciális szabályozással Elektronikus vezérlésű felvonók ◄Digitális számítógép 1955 ◄ Folyamat számítógép 1959 ◄ Valós idejű szoftver 1966 ◄ Mikroszámítógép 1971 ◄ Digitális decentralizált automatizálás 1975 1975 Számjegyvezérlésű szerszámgépek Ipari robotok Ipari parkok Lemezmeghajtók Mechanikus rendszerek folyamatos digitális szabályozással szekvenciális digitális szabályozással ◄ Mikrokontroller 1978 ◄ Személyi számítógép 1980 ◄ Buszrendszer ◄ Új aktuátorok, szenzorok ◄ A komponensek integrálása 1985 Mechatronikus rendszerek mechanika és elektronikus hardver integrációja szoftver által meghatározott funkciók új tervezési eszközök a szimultán tervezéshez egymást segítő és erősítő hatások Mobil robotok CIM (Computer Integrated Manufacturing) Mágneses csapágyak Gépkocsi szabályozás (ABS, ESP (Elektronikus Stabilitási Program)) Isermann: A GÉPÉSZET FEJLŐDÉSE Mechatronics Vol 12.
 szabályozással. szekvenciális szabályozással. Elektronikus vezérlésű felvonók. ◄Digitális számítógép ◄ Folyamat számítógép ◄ Valós idejű szoftver ◄ Mikroszámítógép ◄ Digitális decentralizált. automatizálás Számjegyvezérlésű szerszámgépek. Ipari robotok. Ipari parkok. Lemezmeghajtók. Mechanikus rendszerek. folyamatos digitális szabályozással. szekvenciális digitális szabályozással. ◄ Mikrokontroller ◄ Személyi számítógép ◄ Buszrendszer. ◄ Új aktuátorok, szenzorok. ◄ A komponensek. integrálása Mechatronikus rendszerek. mechanika és elektronikus hardver integrációja. szoftver által meghatározott funkciók. új tervezési eszközök a szimultán tervezéshez. egymást segítő és erősítő hatások. Mobil robotok. CIM (Computer Integrated Manufacturing) Mágneses csapágyak. Gépkocsi szabályozás. (ABS, ESP (Elektronikus Stabilitási Program)) Isermann: A GÉPÉSZET FEJLŐDÉSE Mechatronics Vol 12.")
7
Modell és EU-meghatározás, definíció:
MECHATRONIKA FOGALMA Modell és EU-meghatározás, definíció: A mechatronika, a gépészet, az elektrotechnika/elektronika és az informatika egymást segítő (szinergikus) integrációja termelőrendszerek és termékek előállítására (és termék tervezésére) és működtetésére.
 integrációja termelőrendszerek és termékek előállítására (és termék tervezésére) és működtetésére.")
8
Mechatronika Egyben új szemléletmód is!
Képzése: Kiegészítés, ráképzés Bázisképzés Tudományos előzmények (1940 – 1960) : Rendszertechnika kialakulása Kibernetika – szabályozástechnika Számítástechnika - számítógépek Tananyag: Rendszerek és folyamatok modellezése(jelek és rendszerek din. tulajdonságai) Aktorok/szenzorok felépítése és működtetése(folyamatok méréstechnikája) Számítógépes folyamat-irányítás, real-time feldolgozás Kinematika, dinamika, szabályozástechnika
 : Rendszertechnika kialakulása. Kibernetika – szabályozástechnika. Számítástechnika - számítógépek. Tananyag: Rendszerek és folyamatok modellezése(jelek és rendszerek din. tulajdonságai) Aktorok/szenzorok felépítése és működtetése(folyamatok méréstechnikája) Számítógépes folyamat-irányítás, real-time feldolgozás. Kinematika, dinamika, szabályozástechnika.")
9
A BME GÉK BSC TANTERVE A 2005/2006. TANÉVTŐL

10
A MECHATRONIKA TUDOMÁNYTERÜLETÉNEK ÉRTELMEZÉSE, ÉS ENNEK KIHATÁSA AZ OKTATÁSRA
A tudás mélysége I: Informatikai G V I G: Gépészeti V: Villamos term. tud. alap- képzés + + A tudás szélessége, különböző tudományterületek EGYSZERŰ ÖSSZEGZÉSSEL A tudás mélysége Mechatronika I: Informatikai G: Gépészeti V: Villamos A tudás szélessége, különböző tudományterületek INTEGRÁCIÓVAL

11
A MECHATRONIKAI KÉPZÉS NÉHÁNY LEHETSÉGES VÁLTOZATA
Mechatronikai mérnökképzés gépész alapozással term. tud. alap- képzés Mechatronikai mérnökképzés villamosmérnöki alapozással Mechatronikai mérnökképzés Informatikai alapozással

12
A MECHATRONIKA legfontosabb segédtudományai:
Rendszertan: Analízis és szintézis eszköztára Lineáris – nemlineáris modellezés Elosztott – koncentrált modellezés Lényegkiemelés – kapcsolódások feltárása Matematika: Differenciálegyenletek Mátrix-számítás Fourier, Laplace, Z transzformáció Híradástechnika: Jelek analízise, jelátvitel, jelfeldolgozás Gépészet: Mechanika (dinamika) Áramlástan Hőtan Folyadékok és gázok mechanikája Elektrotechnika: Elektrosztatika - elektrodinamika Hálózatszámítás Analóg és digitális áramkörök Teljesítményelektronika Szabályozástechnika, vezérléstechnika Informatika
 Áramlástan. Hőtan. Folyadékok és gázok mechanikája. Elektrotechnika: Elektrosztatika - elektrodinamika. Hálózatszámítás. Analóg és digitális áramkörök. Teljesítményelektronika. Szabályozástechnika, vezérléstechnika. Informatika.")
13
MECHATRONIKÁHOZ KAPCSOLÓDÓ IRODALMAK
(Szemelvények) Szabó: Gépészeti rendszertechnika Petrik/Huba/Szász: Rendszertechnika Csáki/Bars: Automatika Kuo: Önműködő szabályozó rendszerek Heimann, Gerth, Popp: Mechatronik Fachbuchverlag Leipzig, 2001. Isermann: Mechatronische Systeme Springer, 1999. Roddeck: Einführung in die Mechatronik Vl. Teubner, 1997, Stuttgart Bradley et co.: Mechatronics Chapman & Hall, London, 1991. Min: Mechatronics Springer, New York, 1993. Shetty e't Kolk: Mechatronics System Design PWS Publ. Comp., Boston, 1997.
 Szabó: Gépészeti rendszertechnika. Petrik/Huba/Szász: Rendszertechnika. Csáki/Bars: Automatika. Kuo: Önműködő szabályozó rendszerek. Heimann, Gerth, Popp: Mechatronik. Fachbuchverlag Leipzig, Isermann: Mechatronische Systeme. Springer, Roddeck: Einführung in die Mechatronik. Vl. Teubner, 1997, Stuttgart. Bradley et co.: Mechatronics. Chapman & Hall, London, Min: Mechatronics. Springer, New York, Shetty e t Kolk: Mechatronics System Design. PWS Publ. Comp., Boston,")
15
Példák mechatronikai rendszerekre
Felületszerelő automaták CD és DVD Finompozicionálók (NC és CNC gépek) Aktív mágneses csapágy Precíziós rezgéscsillapító Aktív lengéscsillapító CD-fej
 Aktív mágneses csapágy. Precíziós rezgéscsillapító. Aktív lengéscsillapító. CD-fej.")
16
CD-fej CD lemez metszete A CD-fej elvi felépítése Címkeoldal Védőréteg
Tükrözőréteg Pit Transparens réteg Lézersugár CD lemez metszete A CD-fej elvi felépítése

17
Folyamatos távolság mérés a CD-fej és a lemez között
Lencsefoglalat a lineáris motorral A kvadráns fotódetektor, mint mérőtag Cél az értéktartás:

18
Amit egy klasszikus villamosmérnök egy optomechatronikai rendszerből „lát”
Claus Biaesch-Wiebke: CD-Player und R-DAT-Recorder Vogel Verlag, Würzburg 1988.

19
NC, CNC pozicionáló rendszerek
Jelfeldolgozó Alapjel (előírt érték) - Jelformáló (szabályozó) D/A konverter PC, vagy mikrokontroller
 - Jelformáló. (szabályozó) D/A. konverter. PC, vagy mikrokontroller.")
20
Aktív csapágyazás (N>20.000/min)
Pl.: Lézer TV poligon tükre, spec. hűtőkompresszor, Teljesítmény erősítő Szabályozó Jelfeldolgozó Távolságszenzor-pár (utadó) Elektromágnes-pár Forgórész
 Elektromágnes-pár. Forgórész.")
21
Ide jön az irányítás és a két blokkvázlat

22
MECHATRONIKAI RENDSZER STRUKTURÁJA
ÉS FELADATAI Mérőjelek Alapjelek (előírt érték) Mérendő mennyiségek ELŐíRT: Erő, nyomaték,
 Mérendő mennyiségek. ELŐíRT: Erő, nyomaték,")
23
Aktív lengéscsillapítás
-

24
SMT - Surface Mount Technology
/felületszerelés/ Felépítése: Két portál: nagy csavarómerevségű, rezgéscsillapított acélöntvény keretből szénszálas kompozit anyagból (CFK – Carbon Fiber Composites) A CFK-portálok előnyei: - Tömegük az acélkonstrukciók 1/5-e, viszont merevségük kétszer olyan nagy. - A szén hőtágulási együtthatója jelentősen kisebb, mint a fémé. Ezért ez a robusztus és mégis könnyű konstrukció nagy pontosságot és megbízhatóságot garantál. - Az x-y tengelyek nagy teljesítményű lineáris hajtásaival együtt így 4 szigmánál 30 µm-ig terjedő beültetési pontosság érhető el, óránként alkatrészig terjedő valós beültetési teljesítmény mellett.
 A CFK-portálok előnyei: - Tömegük az acélkonstrukciók 1/5-e, viszont merevségük kétszer olyan nagy. - A szén hőtágulási együtthatója jelentősen kisebb, mint a fémé. Ezért ez a robusztus és mégis könnyű konstrukció nagy pontosságot és megbízhatóságot garantál. - Az x-y tengelyek nagy teljesítményű lineáris hajtásaival együtt így 4 szigmánál 30 µm-ig terjedő beültetési pontosság érhető el, óránként alkatrészig terjedő valós beültetési teljesítmény mellett.")
25
SMT - Surface Mount Technology
/felületszerelés/

26
SMT - Surface Mount Technology
/felületszerelés/

27
SMT - Surface Mount Technology
/felületszerelés/

28
Mechatronikai rezgéscsillapító
ultrapreciziós mérő-és gyártóberendezésekhez

29
MECHATRONIKAI RENDSZEREK FELADATAI
Klasszikus gépészeti kérdésfelvetés Mechatronikai szemléletű kérdésfelvetés Előírva: Gerjesztések Mekkorák legyenek a gerjesztések, hogy teljesüljenek az előírt mennyiségek? Előírva: x, φ, v, Ω, a, ε, F, M, Tömegek, tehetetlenségek Tömegek, tehetetlenségek Mekkora, és milyen irányú lesz ? x, φ, v, Ω, a, ε, F, M, AKTUÁTOROK SZENZOROK Mérés (Visszacsatolás) Processzor (szabályozó)
 Processzor. (szabályozó)")
30
MECHATRONIKAI RENDSZEREK STRUKTÚRÁJA
Tervezési módszer: Szintézis Alapstruktúra: Szabályozókör Működési mód: Automatikus, zavarkompenzált Működés feltétele: Mennyiségek folyamatos mérése Jelfeldolgozás Szenzor Jelformálás Erősítés Ekülső x, a, v, f , , , M u, i p, qv , qE fiz.-techn. foly. Aktuátor Előírt értékek Alapstruktúra Tömbvázlatos formában: szabályzókör

32
Módosító tagok működése

33
A modellalkotás célja, oka és eszközei:
Miért szükséges a matematikai leírás? Az általános mechatronikai rendszer szabályozástechnikai tömbvázlata xr Szabályozó (jelformáló) yc(t) Yc(s) Szabályozott szakasz ys(t) Ys(s) xa - xb xs xe w(t) W(s) Visszacsatoló tag yv(t) Yv(s) CÉL: A feladat szempontjából optimális dinamikával, stabilan működő rendszer megtervezése. OK: A tervezéséhez ismerni kell az átviteli tagok viselkedését mind az idő, mind az operátor tartományban. ESZKÖZ: Az absztrakt matematikai modellek mindegyike alkalmas a tervezéshez szükséges bizonyos tulajdonságok megjelenítésére. A modellek nem kizárják, hanem ellenkezőleg, szervesen kiegészítik egymást.
 yc(t) Yc(s) Szabályozott szakasz. ys(t) Ys(s) xa. - xb. xs. xe. w(t) W(s) Visszacsatoló tag. yv(t) Yv(s) CÉL: A feladat szempontjából optimális dinamikával, stabilan működő rendszer. megtervezése. OK: A tervezéséhez ismerni kell az átviteli tagok viselkedését mind az idő, mind az. operátor tartományban. ESZKÖZ: Az absztrakt matematikai modellek mindegyike alkalmas a tervezéshez. szükséges bizonyos tulajdonságok megjelenítésére. A modellek nem. kizárják, hanem ellenkezőleg, szervesen kiegészítik egymást.")
34
Szabályozó (jelformáló)
Szabályozott szakasz ys(t) Ys(s) Visszacsatoló tag yv(t) Yv(s) Szabályozó (jelformáló) yc(t) Yc(s) - xr xs xa xe xb Első lépésben a szabályozott szakasz dinamikai viselkedését kell megismerni, „leírni” a matematika eszközeivel. Csak e dinamikus tulajdonságok ismeretében történhet meg a kör többi tagjának kiválasztása, illetve tervezése úgy hogy a szabályozókör teljesítse az előírt dinamikai követelményeket és stabilan működjön!
 Ys(s) Visszacsatoló tag. yv(t) Yv(s) Szabályozó (jelformáló) yc(t) Yc(s) - xr. xs. xa. xe. xb. Első lépésben a szabályozott szakasz dinamikai viselkedését kell megismerni, „leírni a matematika eszközeivel. Csak e dinamikus tulajdonságok ismeretében történhet meg a kör többi tagjának kiválasztása, illetve tervezése úgy hogy a szabályozókör teljesítse az előírt dinamikai követelményeket és stabilan működjön!")
35
Dinamikai követelmények
VÁLASZ GERJESZTÉS

36
A SZABÁLYOZÁS MINŐSÉGI KÖVETELMÉNYEI:
DINAMIKAI KÖVETELMÉNYEK (IDŐ TARTOMÁNY): Minimális maradó hiba (szabályozási eltérés) Rövid szabályozási idő Rövid lappangási idő Rövid felfutási idő Kis túllendülés STABILITÁS (FREKVENCIA TARTOMÁNY): Elméletben 0 ≤ ω ≤ ∞ tartományban működjön stabilan Gyakorlatban a releváns frekvencia tartományban legyen stabil ELLENTMONDÓ KÖVETELMÉNYEK: Rövid felfutási idő és kis túllendülés Kis túllendülés és minimális maradó hiba Rövid szabályozási idő és stabilitás
: Minimális maradó hiba (szabályozási eltérés) Rövid szabályozási idő. Rövid lappangási idő. Rövid felfutási idő. Kis túllendülés. STABILITÁS (FREKVENCIA TARTOMÁNY): Elméletben 0 ≤ ω ≤ ∞ tartományban működjön stabilan. Gyakorlatban a releváns frekvencia tartományban legyen stabil. ELLENTMONDÓ KÖVETELMÉNYEK: Rövid felfutási idő és kis túllendülés. Kis túllendülés és minimális maradó hiba. Rövid szabályozási idő és stabilitás.")
37
Komplex algebra

38
A modellezés absztrakciós szintjei és a matematikai modell
létrejöttének folyamata egy példán bemutatva Valóságot tükröző működési modell Struktúra modell Matematikai modell Megoldások: a ) fbe = 0, akkor vm(0) = v1 b ) fbe = (t), akkor ált. megoldás v1 vm(t) t T Y(s) = Fbe Vm Finomítás
 fbe = 0, akkor vm(0) = v1. b ) fbe = (t), akkor ált. megoldás. v1. vm(t) t. T. Y(s) = Fbe. Vm. Finomítás.")
39
Alapvető matematikai modellek (ELŐZETES)
I/O szemlélet (idő-és operátor tartományban) Időtartományban Operátor (frekvencia) tartományban Megjegyzés: Idő-és operátor tartományban, valamint lineáris és nemlineáris rendszerek esetében is a legjobban alkalmazható modell-típus az állapottér modell. Ez későbbi tananyag.
 Időtartományban. Operátor (frekvencia) tartományban. Megjegyzés: Idő-és operátor tartományban, valamint lineáris és nemlineáris rendszerek esetében is a legjobban alkalmazható modell-típus az állapottér modell. Ez későbbi tananyag.")
40
ALAPVETŐ FOGALMAK y(t) SÚLYFÜGGVÉNY (időtartományban értelmezett):
homogén differenciál egyenlet megoldása, autonóm rendszer válasza, egység impulzus gerjesztésre adott rendszerválasz. Y(s) ÁTVITELI FÜGGVÉNY (frekvenciatartományban, és csak lineáris rendszerekre értelmezett): Válasz komplex függvény |Y(jω)|: amplitúdó arány Arc{Y(j ω)}: fáziskülönbség Gerjesztés
 ÁTVITELI FÜGGVÉNY. (frekvenciatartományban, és csak lineáris rendszerekre értelmezett): Válasz. komplex függvény. |Y(jω)|: amplitúdó arány. Arc{Y(j ω)}: fáziskülönbség. Gerjesztés.")
41
MATEMATIKAI MODELLEK KAPCSOLATA Operátor, v. frekvenciatartomány
Idő-tartomány Operátor, v. frekvenciatartomány u(t) v(t) V(s) y(t) U(s) Y(s) y(t) súlyfüggvény homogén differenciál egyenlet megoldása, autonóm rendszerválasz átviteli függvény s = jω Szabályozástechnikában még: h(t) átmeneti függvény, azaz az ugrásfüggvényre adott válasz [1(t)] Arc{Y(j ω)}: fáziskülönbség Y(jω) |Y(j ω)|: amplitúdó-arány
 v(t) V(s) y(t) U(s) Y(s) y(t) súlyfüggvény. homogén differenciál egyenlet megoldása, autonóm rendszerválasz. átviteli függvény. s = jω. Szabályozástechnikában még: h(t) átmeneti függvény, azaz az ugrásfüggvényre adott válasz [1(t)] Arc{Y(j ω)}: fáziskülönbség. Y(jω) |Y(j ω)|: amplitúdó-arány.")
42
MŰVELETEK A MATEMATIKAI MODELLEKKEL A SZABÁLYOZÁSTECHNIKÁBAN
Hogyan jutunk időbeli válaszhoz? Hogyan jutunk időbeli amplitudó és fázis információhoz? Konvolúció kezdeti érték hatása gerjesztés hatására és

43
Harmonikus jelek helyettesítése a komplex exponenciális függvények
segítségével. Közvetlen előnyök a deriválás és integrálás során. A vektorok komplex alakja: : amplitúdó arány fáziskülönbség

44
Jelfolyam gráf HOGYAN MŰKÖDIK A SZABÁLYOZÓKÖRBEN LÉVŐ HUROK?
A FOLYAMATOK SZEMLÉLTETÉSÉNEK LEGJOBB ESZKÖZEI A JELFOLYAMGRÁFOK ÉS A TÖMBVÁZLATOK Jelfolyam gráf A jelfolyam gráfot (ábrát) a tömbvázlat egyszerűsített jelölésének lehet tekinteni. A jelfolyam ábra és a tömbvázlat alakjában mutatkozó különbségen kívül a jelfolyam ábrának általában szigorúbb matematikai összefüggéseknek kell eleget tennie, míg a tömbvázlaton alapuló jelölésmód felhasználásának szabályai sokkal rugalmasabbak és kevésbé szigorúak. A jelfolyam ábra grafikus eszköz, amelyet eredetileg S. J. Mason vezetett be a lineáris algebrai egyenletrendszer változói között fennálló ok és okozati kapcsolatok ábrázolására: „egyenlet gyorsírás”.
 a tömbvázlat egyszerűsített jelölésének lehet tekinteni. A jelfolyam ábra és a tömbvázlat alakjában mutatkozó különbségen kívül a jelfolyam ábrának általában szigorúbb matematikai összefüggéseknek kell eleget tennie, míg a tömbvázlaton alapuló jelölésmód felhasználásának szabályai sokkal rugalmasabbak és kevésbé szigorúak. A jelfolyam ábra grafikus eszköz, amelyet eredetileg S. J. Mason vezetett be a lineáris algebrai egyenletrendszer változói között fennálló ok és okozati kapcsolatok ábrázolására: „egyenlet gyorsírás .")
45
AZ ÁTVITELI FÜGGVÉNY ÁBRÁZOLÁSÁNAK
LEHETŐSÉGEI Y(s) U(s) V(s) Y(s) U(s) V(s) JELFOLYAMGRÁFFAL TÖMBVÁZLATTAL
 U(s) V(s) Y(s) U(s) V(s) JELFOLYAMGRÁFFAL. TÖMBVÁZLATTAL.")
46
A dinamikus rendszerek szimulációs váza tömbvázlatos formában nemlineáris rendszerek megjelenítésére is alkalmas. A differenciálegyenlet rendszert sem mindig feltétlenül szükséges Laplace transzformált alakban, algebrai egyenletrendszer formájában előállítani. Vannak azonban olyan gráf tulajdonságok, amelyek a szimuláció alapját képezik: A jel a gráf élen kizárólag csak a megadott irányban terjedhet. A gráf csomópontokban mind kereszt, mind átmenő változók, valamint az ezekből származtatott mennyiségek is megjelenhetnek, de kizárólag a csomópontokba befutó éleket szabad csak összegezni, mégpedig előjelhelyesen. A kimenő élek az összegzésben nem számítnak. A gráf él fordított irányban nem jelent minden esetben összefüggést.

47
Műveletek jelfolyam gráfokkal
Egyszerű feladat: a12 lehet matematikai művelet, pl. szorzás, integrálás, de lehet átviteli függvény is Rendszeregyenlet ábrázolása „gyorsírásos” jelfolyam gráffal: Adott az alábbi fiktív rendszermodell:

48
Fontos összefüggések:
Előrevezető út. Ez egy bemenő csomópontból egy kimenő csomópontig vezető olyan út, amely minden érintett csomóponton csak egyszer halad át. Az út átviteli tényezője. Egy út befutása során érintett ágak átviteli tényezőinek szorzatát az út átviteli tényezőjének nevezzük. Hurok. Olyan út, amely ugyanabból a csomópontból indul, mint amelyikbe végül befut és amelyik minden érintett csomóponton csak egyszer halad át. Huroktényező. A huroktényezőt a hurkot alkotó út eredő átviteli tényezőjeként definiáljuk. Szerkesztési szabályok összefoglalása: Egy csomóponti változó értéke a csomópontba belépő jelek összege. A csomóponti változó értékét minden, a csomópontot elhagyó ág továbbítja. Azokat az ágakat, amelyek ugyanolyan irányításúak és két csomópontot kötnek össze, egyetlen olyan ággal helyettesíthetünk, amelynek átviteli tényezője a párhuzamos ágak átviteli tényezőinek az összege. A sorba kötött, egyirányú ágakat egyetlen olyan ággal helyettesíthetjük, amelynek átviteli tényezője az ágak átviteli tényezőjének szorzata. A jelfolyam gráfot a tömbvázlatot helyettesítő egyszerűbb jelölésnek is tekinthetjük.

49
A szabályozásokban és a szimulációs programokban alapvető alakzat a hurok:
x1 x2 x3 a b c Ha a visszacsatolás operátora negatív előjelű, akkor természetesen a szabályozástechnikában megszokott formát kapjuk. A továbbiakban csak a negatív visszacsatolásokkal foglalkozunk. x1 x2 x3 a b -c Amennyiben egy rendszerben, vagy annak matematikai modelljében visszacsatolás van, akkor a stabilitás elsőrangú feltétele, hogy ez a visszacsatolás negatív legyen. Ez nem csak a szabályozásokra vonatkozik, hanem a differenciálegyenletek megoldására is. Az állapottér modell főegyenlete elsőrendű differenciálegyenleteket tartalmaz, a változók első deriváltjára rendezve. Az egyenletrendszert jelfolyam gráf alakban felírva látjuk, hogy stabilis rendszerben egy adott változót a deriváltjához csak negatívan lehet visszacsatolni.

50
Két, sorosan illeszkedő hurok átviteli függvénye, ha a hurkoknak nincsen közös csomópontjuk, úgy fogható fel, mint soros eredő: x1 x2 x3 a b -c x4 x5 d e -f Két, olyan sorosan illeszkedő hurok átviteli függvénye, amelyek közös csomóponttal, rendelkeznek, a nevezőjében már nem tartalmazza a hurkok szorzatát: x1 x2 x3 a b -c x4 e -f

51
Átviteli függvények és a stabilitás
Ha a zárt kör nevezője valamely frekvencián zérus:

52
MODELLEZÉSI ALAPELVEK Struktúrától a matematikai leírásig
I. absztrakció II. absztrakció Matematikai modell Válaszok Teszt, gerjesztések Finomítás Fizikai- technikai valóság Lényeg kiemelés a célnak alárendelve Struktúra modell Fizikai törvény Lineáris Nemlineáris Koncentrált paraméterű Elosztott paraméterű

53
MODELLEZÉSI ALAPELVEK
Koncentrált paraméterű Elosztott paraméterű u(t) i(t) közönséges differenciál- egyenlet, kétpólus módszer u(t,x) i(t,x) Parciális differenciál- egyenlet, négypólus módszer
 i(t) közönséges differenciál- egyenlet, kétpólus módszer. u(t,x) i(t,x) Parciális differenciál- egyenlet, négypólus módszer.")
54
A valóság és a modelljeink
KONCENTRÁLT PARAMÉTERŰ ELOSZTOTT PARAMÉTERŰ LINEÁRIS NEM- TANANYAG Tápvonalak u(t,x) Pl.: k(x), b(v) „Természet” (…és még sokkal bonyolultabb) A MŰSZAKI MODELLEZÉS LÉNYEGE: A MODELL A KITŰZÖTT FELADATHOZ ILLESZKEDJEN, A LÉNYEG KIEMELÉSE SORÁN A FELADAT MEGOLDÁSA SZEMPONTJÁBÓL LEGFONTOSABB ISMÉRVEKRE KELL KONCENTRÁLNI. A FELESLEGES ELBONYOLÍTÁS KÖLTSÉGEKKEL JÁR, DE A HIBÁS ELNAGYOLT MODELL IS!
 Pl.: k(x), b(v) „Természet (…és még sokkal. bonyolultabb) A MŰSZAKI MODELLEZÉS LÉNYEGE: A MODELL A KITŰZÖTT FELADATHOZ ILLESZKEDJEN, A LÉNYEG KIEMELÉSE SORÁN A FELADAT MEGOLDÁSA SZEMPONTJÁBÓL LEGFONTOSABB ISMÉRVEKRE KELL KONCENTRÁLNI. A FELESLEGES ELBONYOLÍTÁS KÖLTSÉGEKKEL JÁR, DE A HIBÁS ELNAGYOLT MODELL IS!")
55
A MODELLEZÉS FOYAMATA PÉLDÁN
Absztrakciós szintek Valóságot tükröző működési modell Struktúra modell Matematikai modell Megoldások: a ) fbe = 0, akkor vm(0) = v1 b ) fbe = (t), akkor ált. megoldás v1 vm(t) t T Y(s) = Fbe Vm Finomítás
 fbe = 0, akkor vm(0) = v1. b ) fbe = (t), akkor ált. megoldás. v1. vm(t) t. T. Y(s) = Fbe. Vm. Finomítás.")
56
Műveletek az absztrakt matematikai modellekkel
ABSZTRAKT MODELLEK Műveletek az absztrakt matematikai modellekkel (Dinamikai tulajdonságok vizsgálata) Időtartományban Gerjesztetlen (autonóm) rendszer Gerjesztett rendszer Operátor (frekvencia) tartományban Gerjesztetlen rendszer Gerjesztett (harmonikus összetevőkre bontható jelek)
 Időtartományban. Gerjesztetlen (autonóm) rendszer. Gerjesztett rendszer. Operátor (frekvencia) tartományban. Gerjesztetlen rendszer. Gerjesztett (harmonikus összetevőkre bontható jelek)")
57
IDŐTARTOMÁNY

58
IDŐTARTOMÁNY

59
IDŐTARTOMÁNY

60
OPERÁTOR (FREKVENCIA) TARTOMÁNY
 TARTOMÁNY")
61
OP ERÁTOR TART.

62
Matematikai modellek ISMÉTLÉS
Állapot leírás (idő-és operátor tartományban) I/O szemlélet (idő-és operátor tartományban) Időtartományban Operátor (frekvencia) tartományban
 I/O szemlélet (idő-és operátor tartományban) Időtartományban. Operátor (frekvencia) tartományban.")
63
y(t) SÚLYFÜGGVÉNY (időtartományban értelmezett):
ISMÉTLÉS y(t) SÚLYFÜGGVÉNY (időtartományban értelmezett): homogén differenciál egyenlet megoldása, autonóm rendszer válasza, egység impulzus gerjesztésre adott rendszerválasz. Y(s) ÁTVITELI FÜGGVÉNY (frekvenciatartományban, és csak lineáris rendszerekre értelmezett): Válasz komplex függvény |Y(jω)|: amplitúdó arány Arc{Y(j ω)}: fáziskülönbség Gerjesztés
 SÚLYFÜGGVÉNY (időtartományban értelmezett): homogén differenciál egyenlet megoldása, autonóm rendszer válasza, egység impulzus gerjesztésre adott rendszerválasz. Y(s) ÁTVITELI FÜGGVÉNY. (frekvenciatartományban, és csak lineáris rendszerekre értelmezett): Válasz. komplex függvény. |Y(jω)|: amplitúdó arány. Arc{Y(j ω)}: fáziskülönbség. Gerjesztés.")
64
Operátor, v. frekvenciatartomány
ISMÉTLÉS MATEMATIKAI MODELLEK 1 dimenzió Idő-tartomány Operátor, v. frekvenciatartomány u(t) v(t) Y(s) V(s) y(t) U(s) y(t) súlyfüggvény homogén differenciál egyenlet megoldása, autonóm rendszerválasz átviteli függvény s = jω Szabályozástechnikában még: h(t) átmeneti függvény, azaz az ugrásfüggvényre adott válasz [1(t)] Arc{Y(j ω)}: fáziskülönbség Y(jω) |Y(j ω)|: amplitúdó-arány
 v(t) Y(s) V(s) y(t) U(s) y(t) súlyfüggvény. homogén differenciál egyenlet megoldása, autonóm rendszerválasz. átviteli függvény. s = jω. Szabályozástechnikában még: h(t) átmeneti függvény, azaz az ugrásfüggvényre adott válasz [1(t)] Arc{Y(j ω)}: fáziskülönbség. Y(jω) |Y(j ω)|: amplitúdó-arány.")
65
Operátor, v. frekvenciatartomány
ISMÉTLÉS MATEMATIKAI MODELLEK n - dimenzió Idő-tartomány Operátor, v. frekvenciatartomány u(t) v(t) Φ(t) U(s) V(s) Φ(t) Φ(t) rezolvens mátrix Állapottér modell
 v(t) Φ(t) U(s) V(s) Φ(t) Φ(t) rezolvens mátrix. Állapottér modell.")
66
Operátor (frekvencia) tartomány
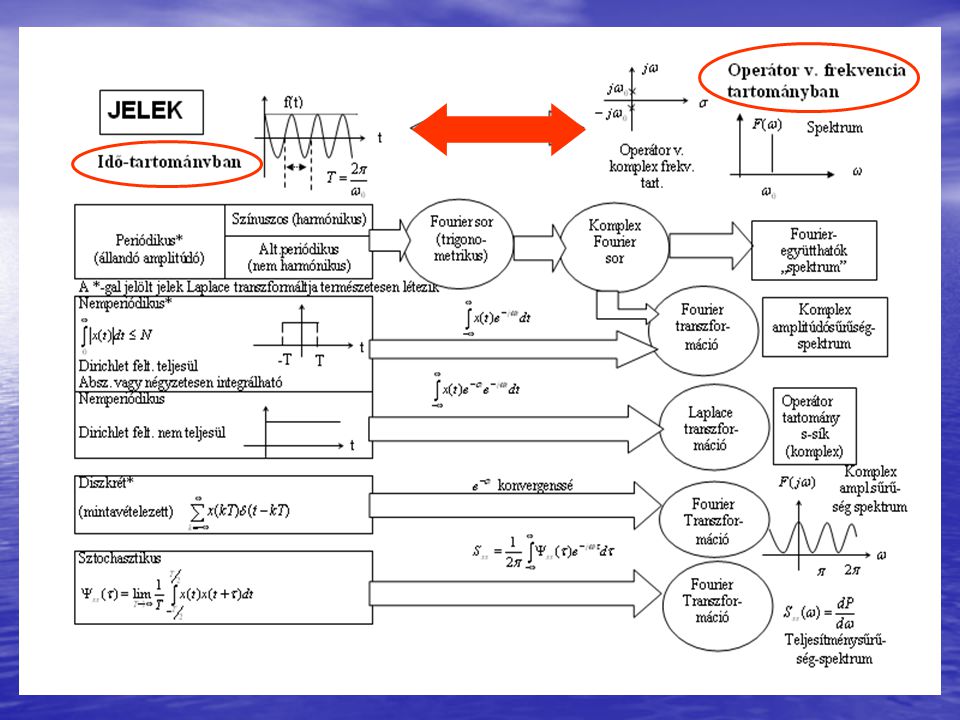
JELEK (VÁLTOZÓK) A RENDSZEREKBEN |F(ω)| x(t)=Asin ω0t ω ω0 Idő- tartomány Operátor (frekvencia) tartomány
 A RENDSZEREKBEN. |F(ω)| x(t)=Asin ω0t. ω. ω0. Idő- tartomány. Operátor (frekvencia) tartomány.")
68
Legfontosabb jeltípusok idő és frekvencia tartományban
Folytonos jelek Diszkrét jelek Diszkrét spektrum Folytonos spektrum

69
JELÁTVITEL PROBLÉMÁINAK SZEMLÉLTETÉSE A SPEKTRUM SEGÍTSÉGÉVEL
Mérendő jel Regisztrált jel Másodrendű átviteli tag frekvencia menete (pl.)
")
70
CSAK BEMUTATÁS CÉLJÁBÓL, EZ KÉSŐBBI TANANYAG!

71
CSAK BEMUTATÁS CÉLJÁBÓL, EZ KÉSŐBBI TANANYAG!

72
CSAK BEMUTATÁS CÉLJÁBÓL, EZ KÉSŐBBI TANANYAG!

73
Ez az oka annak, hogy a FFT programokkal kiszámított spektrum „kétoldalas”. A negatív körfrekvenciákra eső részt a pozitív oldalhoz kell számítani.

76
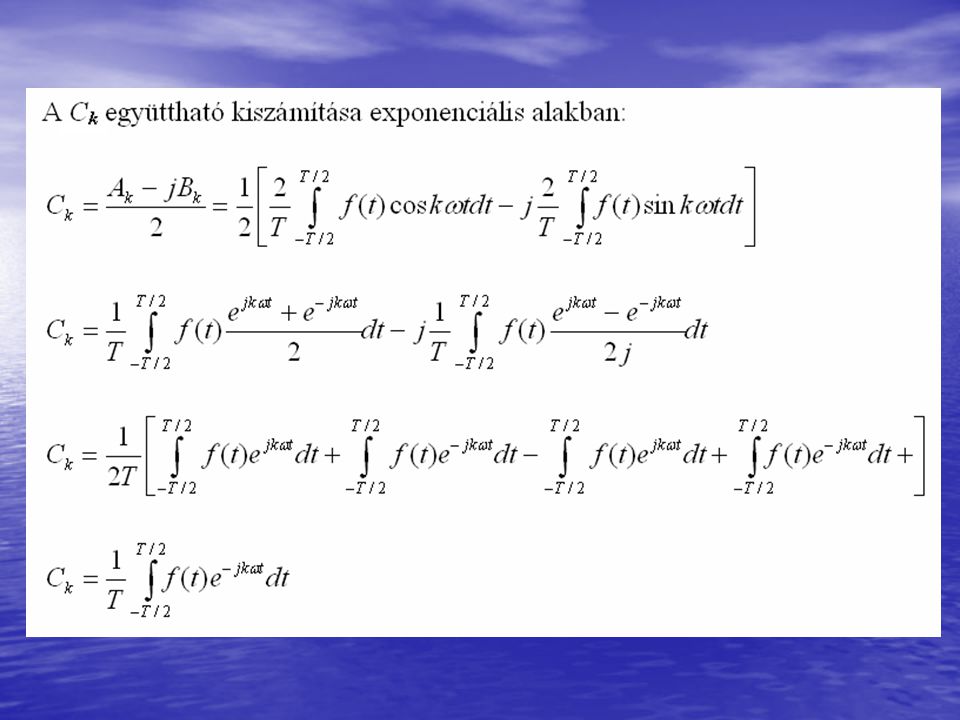
Harmonikus függvények
integráljai Példa állandó amplitúdójú, periodikus függvény Fourier sorának kiszámítására Annak szemléltetése, hogy az egyes együtthatók meghatározása során milyen integrálási határokkal kell számolni. Alap-harmonikus, és behelyettesítési alakja az integrálásnál

77
Az úgynevezett egyen-összetevő (lin. átlag):
:")
78
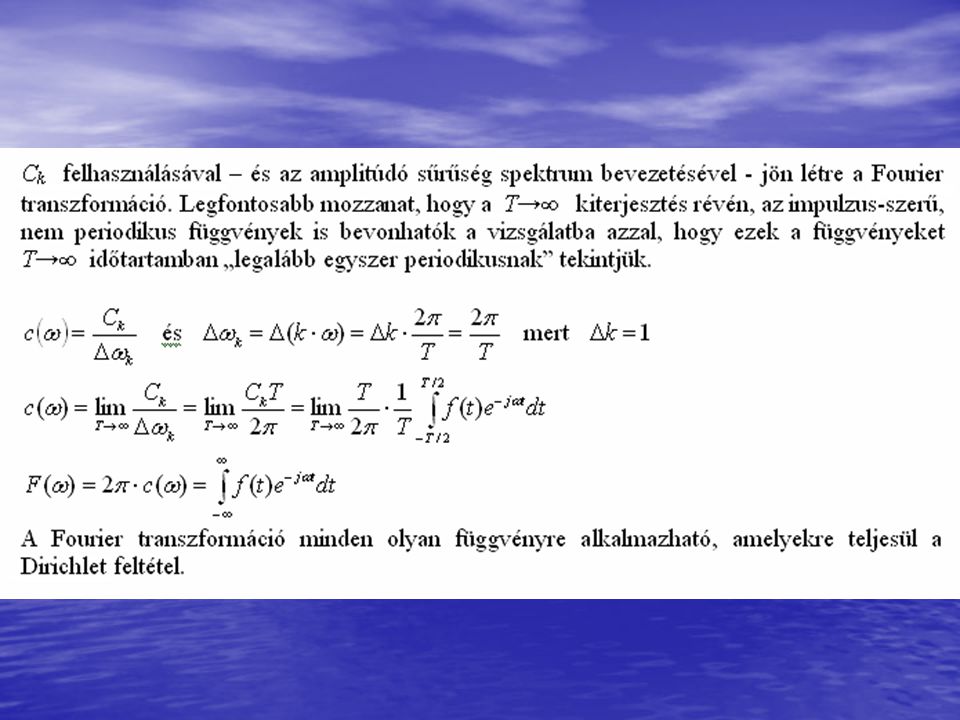
A Fourier - együtthatók ábrázolása a körfrekvenciák függvényében:
A „spektrum” A Fourier - együtthatók alapján megrajzolt harmonikus összetevők, és eredőjük. Elméletben, ha az eredőt az összes összetevő figyelembe vételével rajzoljuk meg, akkor az eredeti függvényt látjuk viszont.

79
BOULDING-FÉLE SZINTEK Publ.: General View of System Science, 1986
Boulding: Minden szint involválja az összes alatta lévőt, és új minőséget reprezentál. Saját kiegészítés: E,A: Energia-és anyagáram I: Információáram M:Memória, ROM/RAM T:Tanulás, adaptivitás, RAM G: „Genetikus” memória, ROM K: Kreatív öntudat Transzcendens rendszerek Információ ? Társadalom E,A,I,G,M,T,K Egyes ember E,A,I,G,M,T,K Reflexív rendszerek Állatvilág E,A,I,G,M,T E,A,I,G Regeneratív rendszerek Növények Adaptív rendszerek Öntanuló automaták E,A,I,M,T Önműködő rendszerek Automaták E,A,I,M E,A Dinamikus rendszerek Gépek mozgásban Struktúrák Gépek nyugalomban

80
Mi a mérés információelméleti modellje?
Minden szabályozás előfeltétele a folyamatos információáramlás Mi a mérés információelméleti modellje? A Shannon-féle szemléleten alapul, és általánosan használatos a hírközlési rendszerek esetében. ADÓ ÁTV.CSAT. DEKÓD. VEVŐ KÓDOLÓ HÍRKÖZLÉSI MODELLEK

81
MÉRENDŐ VÁLTOZÓ JELÁTVIVŐ (ÉRZÉKELŐ) JEL-FELDOLGOZÓ KIJELZŐ (EREDMÉNY) FEL- HASZNÁLÓ MÉRŐLÁNC, MINT ÁTVITELI CSATORNA ZAVARÁSOK, ZAJOK Mérőlánc például szabályozási körökben a visszacsatolás, amely ellenőrző tagot tartalmaz.

82
AZ INFORMÁCIÓ ÁTVITEL ÁLTALÁNOS MODELLJE
VEVŐ n-1. állapotban VEVŐ n. állapotban FORRÁS Szinkronizáció KÓDOLÓ DEKÓDOLÓ ÁTVITELI CSATORNA Információ veszteség Zaj, zavarások

83
Mi az információelmélet?
Tudományterület (~1948), amely valamilyen fizikai rendszeren továbbítható, időfüggő jelekkel és a jeltovábbítás feltételeivel foglalkozik. Jelelmélet, kódolás-elmélet, mint segédtudományok Méréstechnikai értelmezésben: Zajos jelátviteli csatorna BEMENŐJELEK KIMENŐJELEK MÉRŐLÁNC ZAJ
, amely valamilyen fizikai rendszeren továbbítható, időfüggő jelekkel és a jeltovábbítás feltételeivel foglalkozik. Jelelmélet, kódolás-elmélet, mint segédtudományok. Méréstechnikai értelmezésben: Zajos jelátviteli csatorna. BEMENŐJELEK. KIMENŐJELEK. MÉRŐLÁNC. ZAJ.")
84
JEL: (IDŐBEN VÁLTOZÓ) FIZIKAI (KÉMIAI) MENNYISÉG
HÍR/KÖZLEMÉNY: (IDŐBEN) KORLTOZOTT JELEK INFORMÁCIÓ (Shannon, Bell Laboratories): BIZONYTALANSÁG, AMELYET A HÍR MEGSZŰNTET(ETT). Shannon (1948) csak a műszaki értelemben vett információk (elsősorban digitális villamos jelek által hordozott hírtartalom) mérésére dolgozott ki módszert! HÍRKÉSZLET: ÖSSZES LEHETSÉGES HÍR INFORMÁCIÓ MENYISÉG/HÍRTARTALOM: A HÍR KÖZLÉSE ÁLTAL ELOSZLATOTT BIZONYTALANSÁG NAGYSÁGA. EZÉRT ANNAK A HÍRNEK VAN NAGYOBB INFORMÁCIÓTARTALMA, AMELYNEK A BEKÖVETKEZÉSI VALÓSZÍNŰSÉGE KISEBB. ANLÓGIA : ENTRÓPIA
 KORLTOZOTT JELEK. INFORMÁCIÓ (Shannon, Bell Laboratories): BIZONYTALANSÁG, AMELYET A HÍR MEGSZŰNTET(ETT). Shannon (1948) csak a műszaki értelemben vett információk (elsősorban digitális villamos jelek által hordozott hírtartalom) mérésére dolgozott ki módszert! HÍRKÉSZLET: ÖSSZES LEHETSÉGES HÍR. INFORMÁCIÓ MENYISÉG/HÍRTARTALOM: A HÍR KÖZLÉSE ÁLTAL ELOSZLATOTT BIZONYTALANSÁG NAGYSÁGA. EZÉRT ANNAK A HÍRNEK VAN NAGYOBB INFORMÁCIÓTARTALMA, AMELYNEK A BEKÖVETKEZÉSI VALÓSZÍNŰSÉGE KISEBB. ANLÓGIA : ENTRÓPIA.")
85
A HÍR ENTRÓPIÁJA (Shannon)
Milyen megfontolások és milyen analógiák vezettek a fogalom megalkotásához? Kolmogorov (1933): 0 ≤ P ≤ 1 Biztosan bekövetkező esemény valószínűsége P=1, de hírtartalma H=0 Lehetetlen esemény valószínűsége P=0, ennek hírtartalma viszont H~∞ Milyen függvénykapcsolat képes leírni ezt a gondolatmenetet? Hartley (1928): A valószínűség szemléltetésére gyakran alkalmazzák a dobókocka példáját, és a dobást kísérletnek nevezik. Egyetlen kísérlet eredményéről szóló hír információtartalma, mert ebben az esetben minden lehetséges eredmény egyforma valószínűséggel következhet be: Emlékeztetőül:
: 0 ≤ P ≤ 1. Biztosan bekövetkező esemény valószínűsége P=1, de hírtartalma H=0. Lehetetlen esemény valószínűsége P=0, ennek hírtartalma viszont H~∞ Milyen függvénykapcsolat képes leírni ezt a gondolatmenetet Hartley (1928): A valószínűség szemléltetésére gyakran alkalmazzák a dobókocka példáját, és a dobást kísérletnek nevezik. Egyetlen kísérlet eredményéről szóló hír információtartalma, mert ebben az esetben minden lehetséges eredmény egyforma valószínűséggel következhet be: Emlékeztetőül:")
86
Neumann János javaslata: Az elektronikus számológép a zavarérzékenység miatt ne analóg, és ne több szinten kvantált jelekkel végezze a műveleteket, hanem csupán két jelszint legyen engedélyezett (igen-nem logika). A két lehetséges állapot következménye, hogy az elektronikus rendszerekben a hírtartalom (entrópia) mérésére a kettes alapú logaritmust használják. Különböző, Pi valószínűségű eseményekből álló hír eredő átlagos entrópiájának számítása: A „bit” egységet Tukey javasolta A hírelmélet szorosan együtt fejlődött a valószínűség számítással és a halmazelmélettel. Shannon és Kolmogorov mellett Kotelnyikov, Hincsin, Feinstein és Fano alapozták meg a korszerű hírelméletet.
 mérésére a kettes alapú logaritmust használják. Különböző, Pi valószínűségű eseményekből álló hír eredő átlagos entrópiájának számítása: A „bit egységet Tukey javasolta. A hírelmélet szorosan együtt fejlődött a valószínűség számítással és a halmazelmélettel. Shannon és Kolmogorov mellett Kotelnyikov, Hincsin, Feinstein és Fano alapozták meg a korszerű hírelméletet.")
87
BINÁRIS HÍRFORRÁS ENTRÓPIÁJA
Mindkét kimenet (1,0) azonos valószínűséggel jelentkezhet: P(1)=P(0) P(1)=1 – P(0) Az „1” jel információtartalma: A „0” jel információtartalma: A forrás átlagos információtartalma: P(1) 0,00 0,05 0,1 0,15 0,2 0,25 0,3 0,4 0,5 -P(1) ld P(1) 0,22 0,33 0,41 0,46 0,52 0,53 (1-P(1))ld (1- P1) 0,07 0,14 0,26 0,31 0,36 0,44 H 0,29 0,47 0,61 0,72 0,81 0,88 0,97 1 A legnagyobb entrópia akkor jelentkezik, ha mindkét érték (1;0) azonos valószínűséggel fordulhat elő. Kisebb eltérés a valószínűségben, pl.: 0,4 – 0,6 nem okoz csupán 0,03 bit csökkenést. Ez kedvez a bináris jelekkel való kódolásnak.
 azonos valószínűséggel jelentkezhet: P(1)=P(0) P(1)=1 – P(0) Az „1 jel információtartalma: A „0 jel információtartalma: A forrás átlagos információtartalma: P(1) 0,00. 0,05. 0,1. 0,15. 0,2. 0,25. 0,3. 0,4. 0,5. -P(1) ld P(1) 0,22. 0,33. 0,41. 0,46. 0,52. 0,53. (1-P(1))ld (1- P1) 0,07. 0,14. 0,26. 0,31. 0,36. 0,44. H. 0,29. 0,47. 0,61. 0,72. 0,81. 0,88. 0, A legnagyobb entrópia akkor jelentkezik, ha mindkét érték (1;0) azonos valószínűséggel fordulhat elő. Kisebb eltérés a valószínűségben, pl.: 0,4 – 0,6 nem okoz csupán 0,03 bit csökkenést. Ez kedvez a bináris jelekkel való kódolásnak.")
88
BINÁRIS HÍRFORRÁS ENTRÓPIÁJA
0,5 P(1) 0 P(0) 1 1 H/bit BINÁRIS HÍRFORRÁS ENTRÓPIÁJA Olyan bináris hírforrás entrópiáját keressük, amelynek kimenetén azonos valószínűséggel fordulhat elő „1” és a „0” jel, azaz Az „1”, vagy „0” hír információtartalma: A forrás átlagos entrópiája:
 0. P(0) H/bit. BINÁRIS HÍRFORRÁS ENTRÓPIÁJA. Olyan bináris hírforrás entrópiáját keressük, amelynek kimenetén azonos valószínűséggel fordulhat elő „1 és a „0 jel, azaz. Az „1 , vagy „0 hír információtartalma: A forrás átlagos entrópiája:")
89
Differenciál-egyenlet
EGYSZERŰ BEMUTATÓ PÉLDA: Másodrendű (2 független energia tároló) mechanikai rendszer f(t) v(t) Vref=0 k b m Állapottér modell Csomóponti módszer Differenciál-egyenlet Átviteli függvény
 mechanikai rendszer. f(t) v(t) Vref=0. k. b. m. Állapottér. modell. Csomóponti módszer. Differenciál-egyenlet. Átviteli. függvény.")
90
MEGOLDÁS: A ck konstansok értéke a kezdeti feltételektől függ.

91
MÁSODRENDŰ TAG OPERÁTOR TARTOMÁNYBAN
Átviteli függvény „Frekvencia- menet” Bode diagram

Hasonló előadás



















 Egy lineáris, kauzális, invariáns DI rendszer>")
