Előadást letölteni
Az előadás letöltése folymat van. Kérjük, várjon

1
ÓE-NIK SZOFTVERFEJLESZTÉS
Szabó Zsolt Ügyvivő szakértő (Kari Erasmus koordinátor)
")
2
Célok A BSc képzés egyik célja, hogy az itt diplomát szerzett hallgatók rendelkezzenek az alapvető szoftvertervezési, -fejlesztési és -tesztelési ismeretekkel "de én nem programozó akarok lenni!" "alapvető?" "csak ennyi, más lehetőségem nincs?" "ugye én leszek a következő John Carmack?"

3
Nem akarok programozni!
Természetesen még a programozást oktatók is tudják, hogy az informatikai/mérnöki tudás nem csak a programozásból áll, DE… Hálózati szakember: gráfok, fák, legrövidebb út, dijkstra algoritmus, OSPF Biztonsági szakember: valószínűségek, prímek, véletlenszámok, hasítás, titkosítás jelszóbiztonság Adatbázis-guru: fák, index-szervezés, hasítás, B-fa, B+ -fa, B* -fa ( filerendszerek)
")
4
Nem akarok programozni!
Mobiltelefon-guru: kódolások, fák, feszítőfa, Kruskal algoritmus Média-szakember, grafikus: mátrixok, sajátérték, sajátvektor, szűrők, konvolúció Csak egy gazdag főnök: tudni kell, hogy mi várható el, mi oldható meg! Ez egy elfogult felsorolás, de a tény: Egy informatikai szakembernek alapszinten programoznia tudni KELL A matematika minden programozás alapja

5
Alapvető?

6
Mééééég! Törzstárgyak
Vállalati információs rendszerek ( üzleti modellezés) Operációs rendszerek ( bash, powershell) Számítógép architektúrák gyakorlat ( processzorszintű utasításkezelés, ASM) Beágyazott rendszerek ( VHDL, ASM)
 Operációs rendszerek ( bash, powershell) Számítógép architektúrák gyakorlat ( processzorszintű utasításkezelés, ASM) Beágyazott rendszerek ( VHDL, ASM)")
7
Mééééég! Választható tárgyak Windows 8-specifikus
Windows Phone, iPhone (Objective-C), Android Adatbányászat, Adattárházak, Prolog PHP, C++
, Android. Adatbányászat, Adattárházak, Prolog. PHP, C")
8
Mééééég! Szakirányok Beágyazott rendszerek és Mobil informatika szakirány Szoftverrendszerek fejlesztése szakirány Képfeldolgozás és gépi látás szakirány Többnyire kötetlen fejlesztés, bármilyen programnyelven!

9
Eszközök Cél a mérnöki (gyakorlatias) gondolkozásmód kialakítása
Az elmélet is fontos, de lényeges különbség: "Azt olvastam" vs. "Úgy tapasztaltam" Programozói nézőpont oktatói oldalról is Ipari eszközök és támogatás ( kompetencia központok) GPS, kamera, demo robotok, speciális szenzorok és eszközök használhatóak
 GPS, kamera, demo robotok, speciális szenzorok és eszközök használhatóak")
10
John Carmack? Hallgatói szakmai munka, minden a hallgató szorgalmától és képességeitől függ Beadandó feladatok Programozási versenyek (házi, országos, nemzetközi) TDK, OTDK Külföldi konferenciák Külföldi nyári egyetemek Erasmus
 TDK, OTDK. Külföldi konferenciák. Külföldi nyári egyetemek. Erasmus")
11
Hallgatói Projektek Ezek természetesen csak kiragadott példák
Évente ~10-15 TDK díjazott, ~30 TDK dolgozat

12
1999-2003 Explorateres, lépegető robot Robotvitorlás
Szuperskalár processzorszimulátor FOBOT, a hatlábú mobil robot Automata ujjlenyomat felismerő rendszer belépés vezérléshez Szteganográfia és rejtjelezés CERBERUS projekt - beléptető biztonsági rendszer

13
2005-2007 CCExplorer Projekt A Morph technika - DKJ Morpher
IntAIBO - Interneten keresztüli platformfüggetlen AIBO navigáció PALCOM Navigáció és térképezés PAL-optika alkalmazásával JAVA alapú arcfelismerés megvalósítása mobiltelefonnal Virtual Hand - Jelbeszéd felismerő rendszer

14
2009 Katasztrófavédelmi és kárelhárítási célú pilótanélküli robotrepülőgéprendszer Lézerszkennerrel támogatott körbelátórendszer önjáró roboton Videoszekvencia felbontásának és minőségének javítása super-resolution technika alkalmazásával DPLUSZ, 3D rekonstrukciós rendszer Információs és tájékozódási rendszer mobiltelefonra

15
2011 Sketch4Match Interaktív tartalom alapú keresőrendszer
Nagyfelbontású digitális szöveti képek kötegelt feldolgozása Mozgáskorlátozottak életvitelét támogató eszközök beszédvezérelt irányítása Átjárhatósági problémák megoldása számítási fürtök és felhő infrastruktúrák között

16
TDK 2012 AUTONOMUS, Autonóm autó navigációjának megvalósítása
Textúra alapú képi adatbázis építése nagyfelbontású orvosi képek klinikai Videók felcímkézése képi tartalom alapján Vastagbél diagnosztikai digitális szöveti mintákon Tőzsdei brókerek kézjeleinek felismerése KINECT szenzor segítségével

17
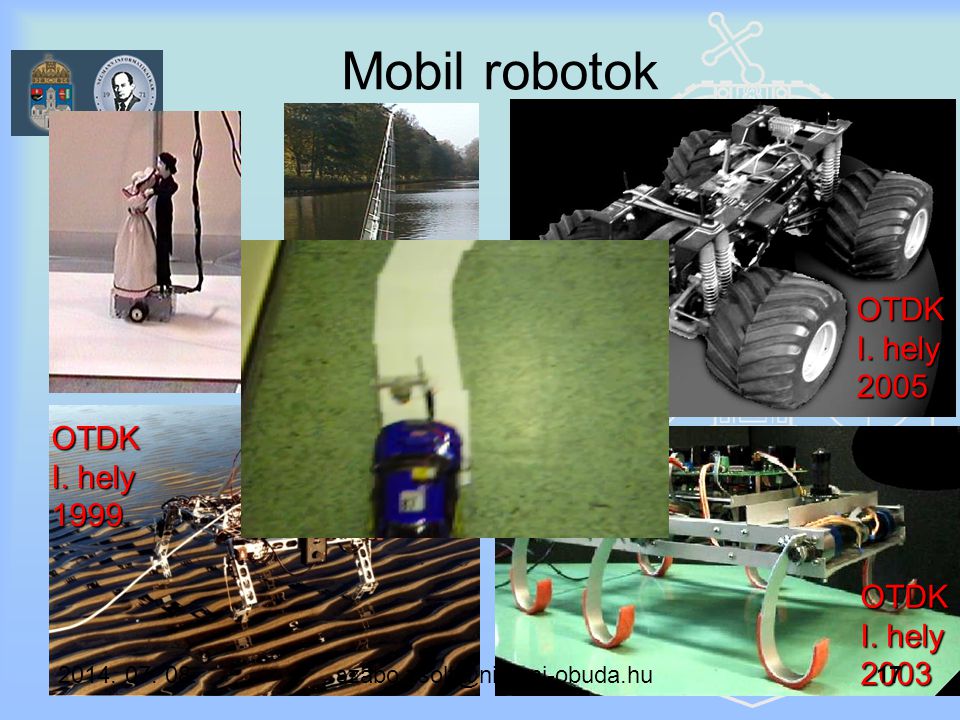
Mobil robotok OTDK III. hely 2005 OTDK I. hely 2005 OTDK I. hely 1999
18
Akadálydetektálás és navigáció
OTDK II. hely 2011

19
PAL használata

20
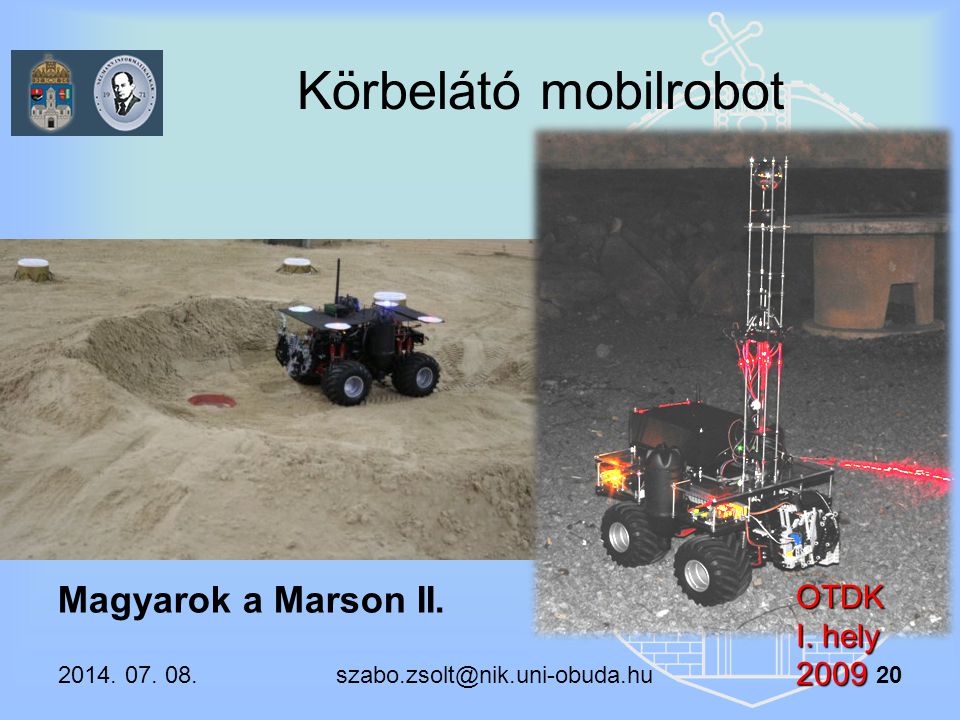
Körbelátó mobilrobot Magyarok a Marson II. OTDK I. hely 2009
21
Robotrepülő

22
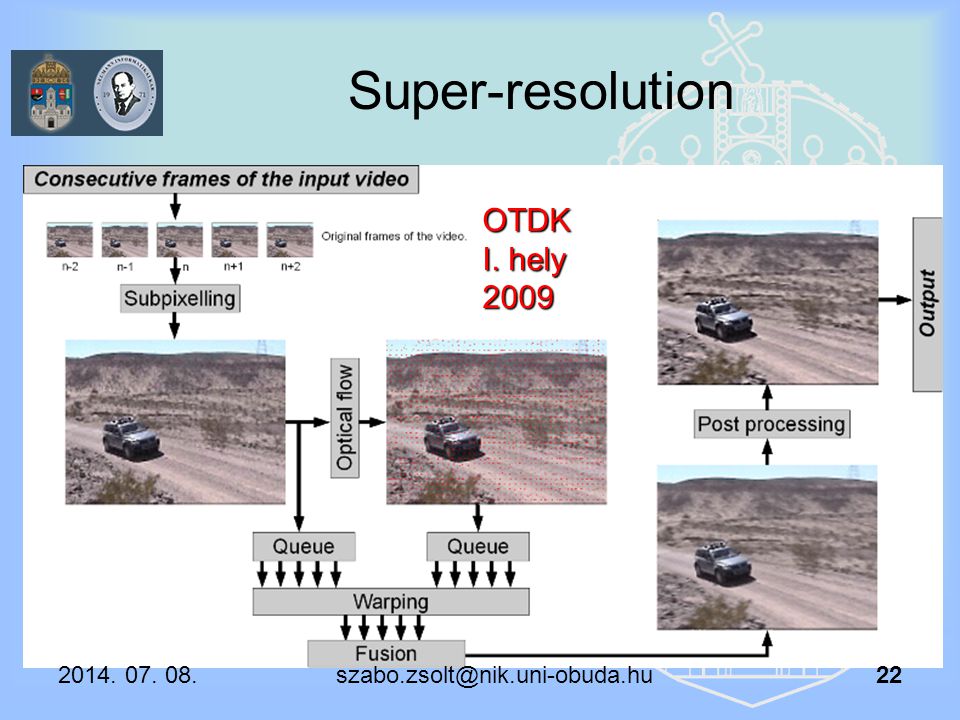
Super-resolution OTDK I. hely 2009 2017.04.04.
23
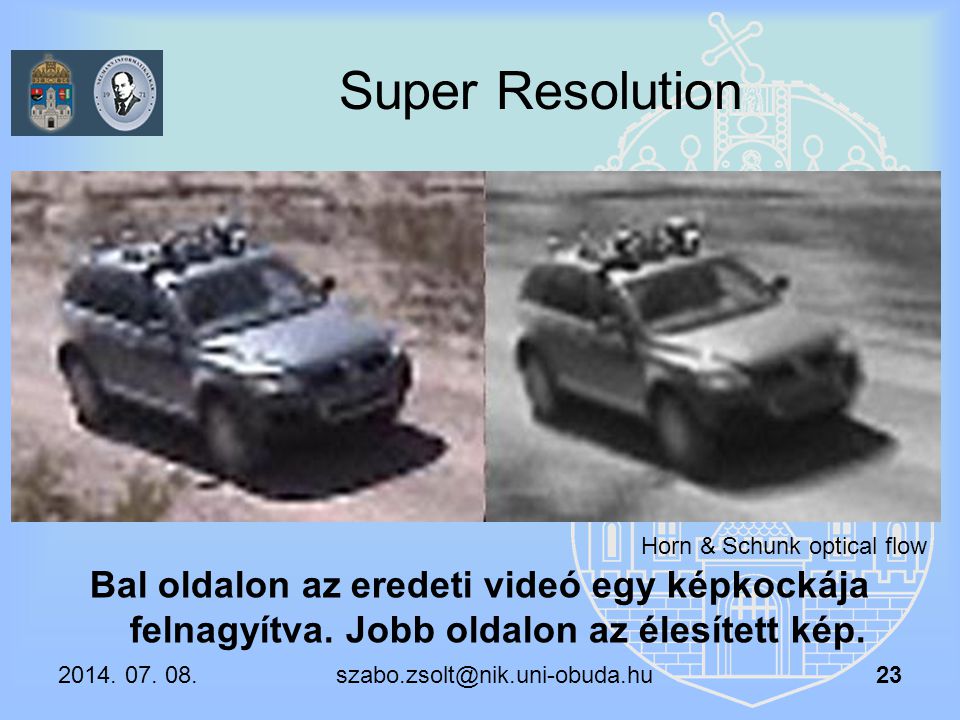
Super Resolution Horn & Schunk optical flow Bal oldalon az eredeti videó egy képkockája felnagyítva. Jobb oldalon az élesített kép.
24
Cerberus

25
Morph

26
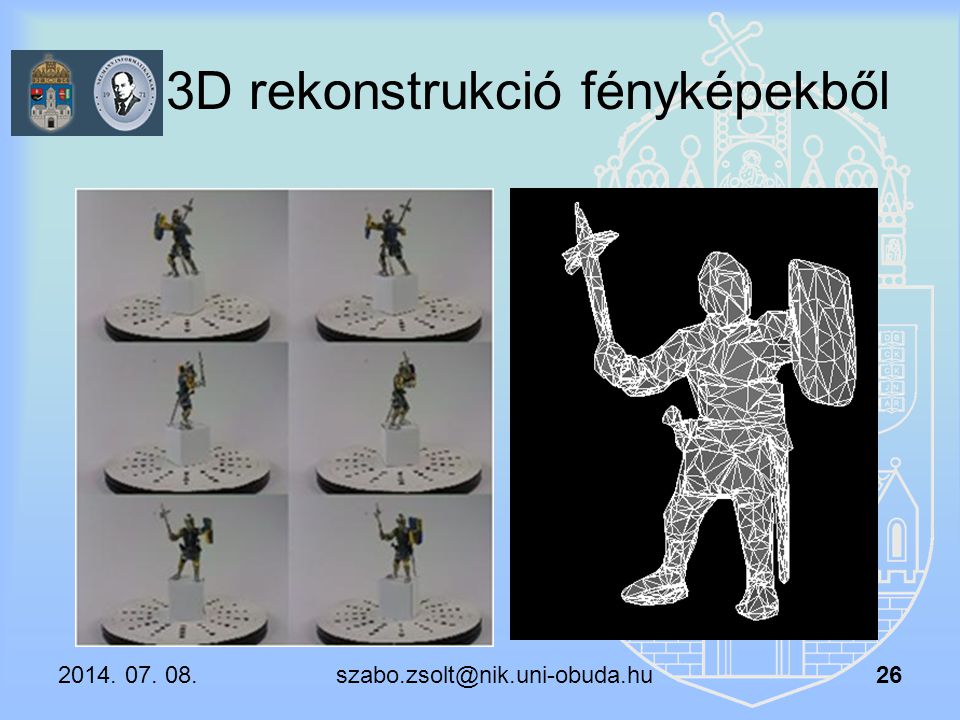
3D rekonstrukció fényképekből
27
TOVÁBBI INFORMÁCIÓK http://nik.uni-obuda.hu/
Bármilyen kérdés:

28
(Kari Erasmus koordinátor)
KÖSZÖNÖM A FIGYELMET! KÉRDÉSEK? Szabó Zsolt Ügyvivő szakértő (Kari Erasmus koordinátor)
")
Hasonló előadás



 Námesztovszki Zsolt Újvidéki Egyetem Magyar Tannyelvű Tanítóképző.>")















